
Envolver
Inicie a secção Envolver
ACTS é o que o professor vai fazer e PERGUNTA é como é que o professor vai facilitar.
| ATOS | PERGUNTA |
|---|---|
|
|
Preparar os alunos para construir
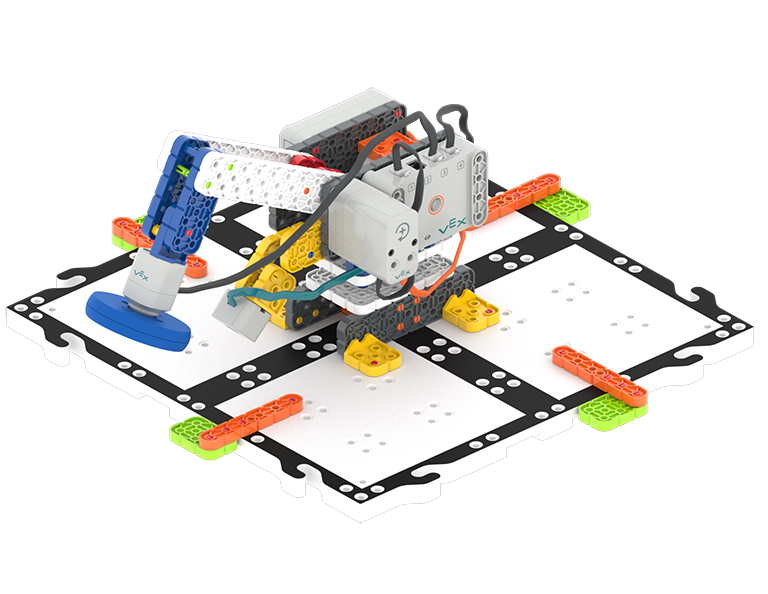
Como acha que podemos usar o sensor ocular no braço do robô para o tornar mais inteligente? Vamos construir o braço robótico (2 eixos) para nos ajudar a descobrir!
Facilite a construção
-
InstruaInstrua
alunos que vão construir o braço robótico (2 eixos) hoje e utilizá-lo para explorar como o
sensor ocular pode ser utilizado para ajudar o braço robótico a detetar e a mover objetos.
Construa o braço do robô de código (2 eixos) Os alunos devem juntar-se aos seus grupos do Laboratório anterior e preencher a ficha Rotinas de Funções & da Robótica. Utilize o diapositivo Responsabilidades de função sugeridas na apresentação de diapositivos de imagens do laboratório como guia para os alunos preencherem esta ficha.
- Incentive os alunos a alternar entre os tipos de funções de Construtor/Jornalista que também desenvolveram.
-
DistribuirDistribuir
Instruções de construção do braço robótico de código (2 eixos) a cada equipa. Os jornalistas
devem reunir os materiais da lista de verificação.
-
FacilitarFacilitar
processos de construção e discussões enquanto os alunos trabalham.
Os construtores podem começar a construir. Os jornalistas devem ajudar com as instruções de construção, conforme necessário. Para levar os alunos a pensar sobre o funcionamento do sensor ocular no braço, coloque questões como:
- Onde precisaria de estar um objeto para que o sensor ocular o detetasse?
- Porque acha que posicionamos o sensor ocular aqui na construção?
- OfereçaOfereça sugestões e observe estratégias positivas de formação de equipas e de resolução de problemas à medida que as equipas constroem em conjunto.

Solução de problemas do professor
- Verifique os fios e as portas - Para que os projetos VEXcode GO funcionem como esperado com o braço do robô, os fios de cada um dos sensores e do motor devem estar corretamente configurados. Se os alunos estão a ter dificuldades, peça-lhes que verifiquem os fios e façam certifique-se de que correspondem à lista de portas quando configurando o braço robótico no VEXcode GO. Veja o Utilizando os sensores VEX GO Artigo da Biblioteca VEX para informações sobre como ligar sensores.
- Correção do sensor ocular - Por vezes, o sensor ocular detetará o eletroíman em vez do disco. Nesta situação, o projeto pode não diferenciar entre o disco azul e o verde. Experimente adicionar um bloco [Wait] depois de o Eye Sensor detetar um disco pela primeira vez para resolver isto.
- Os giros do braço do robô não serão 100% precisos - Por vezes, o braço colocará o disco no local errado. A base não irá rodar exatamente 90 ou 180 graus. Tal como os humanos não estão corretos 100% das vezes, as construções não estarão corretas 100% das vezes. Este pode ser um momento de aprendizagem. Uma investigação ou discussão sobre como os alunos podem melhorar o Braço Robô pode ser uma ótima atividade de extensão!
Estratégias de Facilitação
- Desconstruir construções anteriores e trabalhar em grupos mais pequenos - Se quiser voltar aos agrupamentos mais pequenos dos Laboratórios 4 e 5, pode fazê-lo. Desconstrua todas as construções do Braço do Robot de Código (1 Eixo) do Laboratório 3 e faça com que cada grupo mais pequeno construa o Braço do Robot de Código (2 Eixos) de raiz para este Laboratório. Esta compilação será novamente utilizada no Laboratório 5, para que o agrupamento mais pequeno possa permanecer o mesmo.
- Pense numa condição como uma questão de Verdadeiro/Falso - Se os alunos tiverem dificuldades em compreender o conceito de condição, ajude-os a enquadrá-la como uma questão de Verdadeiro ou Falso. Por exemplo, “Qual é a tua cor favorita?” não seria uma condição, porque não poderia ser uma resposta Verdadeiro/Falso. “A tua cor favorita é o azul?” no entanto, pode ser Verdadeiro ou Falso, pelo que pode ser uma condição. Peça aos alunos que façam um brainstorming de uma lista de questões de estilo de condição sobre coisas que veem para ajudar a ligar o conceito de condição ao sensor ocular no laboratório.
- Nota: o Braço do Robot move-se rapidamente e um disco pode ser arrancado do Electroíman quando este se move à volta da base. Isto pode ser surpreendente (e divertido) para os alunos.