
Engagieren
Starten Sie den Bereich „Engage“
ACTS ist das, was der Lehrer tun wird, und ASKS ist die Art und Weise, wie der Lehrer dies unterstützt.
| RECHTSAKTE | FRAGEN |
|---|---|
|
|
Vorbereitung der Schüler auf den Bau
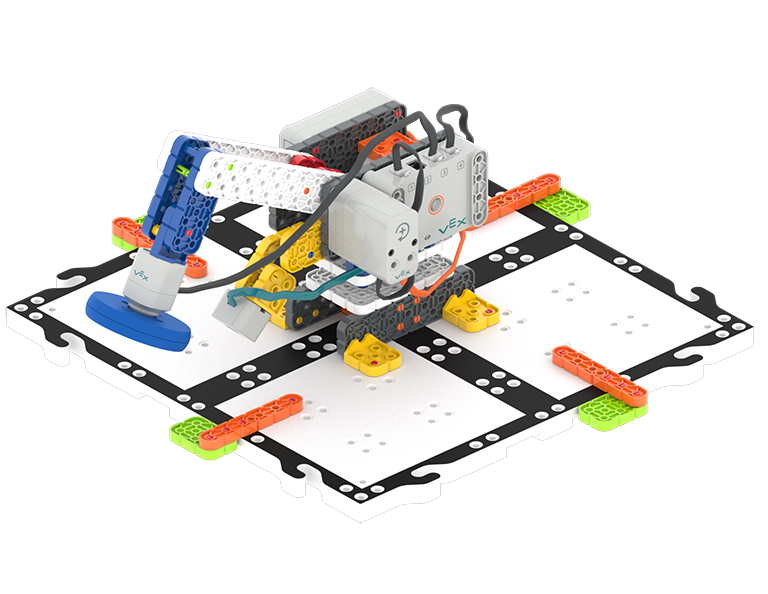
Wie können wir Ihrer Meinung nach den Augensensor am Roboterarm nutzen, um ihn intelligenter zu machen? Bauen wir den Roboterarm (2-Achsen), der uns dabei hilft, das herauszufinden!
Erleichtern Sie den Aufbau
-
Unterrichten SieUnterrichten Sie
Schüler, dass sie heute den Roboterarm (2-achsig) bauen und damit untersuchen werden, wie
der Augensensor dem Roboterarm beim Erkennen und Bewegen von Objekten helfen kann.
Bauen Sie den Code-Roboterarm (2-Achsen) Die Schüler sollten sich ihren Gruppen aus dem vorherigen Labor anschließen und das Arbeitsblatt „Robotikrollen & Routinen“ ausfüllen. Verwenden Sie die Folie „Vorgeschlagene Rollenverantwortlichkeiten“ in der Diashow mit den Laborbildern als Leitfaden für die Schüler zum Ausfüllen dieses Arbeitsblatts.
- Ermutigen Sie die Schüler auch, zwischen den von ihnen entwickelten Builder-/Journalisten-Rollen zu wechseln.
-
Verteilen SieVerteilen Sie
Code-Roboterarm-Bauanleitungen (2 Achsen) an jedes Team. Journalisten sollten die
Materialien auf der Checkliste zusammenstellen.
-
ErleichternErleichtern
Sie den Aufbauprozess und die Diskussionen, während die Schüler arbeiten.
Bauherren können mit dem Bau beginnen. Journalisten sollten bei Bedarf mit Bauanleitungen behilflich sein. Um die Schüler zum Nachdenken über die Funktionsweise des Augensensors am Arm anzuregen, stellen Sie Fragen wie:
- Wo müsste sich ein Objekt befinden, damit der Augensensor es erkennen kann?
- Warum haben wir den Augensensor Ihrer Meinung nach hier am Aufbau angebracht?
- AngebotAngebot Vorschläge und beachten Sie positive Teambuilding- und Problemlösungsstrategien, während die Teams gemeinsam aufbauen.

Fehlerbehebung für Lehrer
- Überprüfen Sie die Kabel und Anschlüsse – Damit die VEXcode GO-Projekte wie vorgesehen mit dem Roboterarm funktionieren, müssen die Kabel aller Sensoren und Motoren richtig konfiguriert sein. Wenn Wenn die Schüler Schwierigkeiten haben, lassen Sie sie die Kabel noch einmal überprüfen und herstellen Stellen Sie sicher, dass sie mit der Liste der Ports übereinstimmen Konfigurieren des Roboterarms in VEXcode GO. Siehe die Verwendung der VEX GO-Sensoren VEX-Bibliotheksartikel für Informationen zum Anschluss von Sensoren.
- Augensensor-Fix – Manchmal erkennt der Augensensor den Elektromagneten statt der Scheibe. In dieser Situation unterscheidet das Projekt möglicherweise nicht zwischen der blauen und der grünen Scheibe. Um dieses Problem zu lösen, versuchen Sie, einen [Warten]-Block hinzuzufügen, nachdem der Augensensor zum ersten Mal eine Festplatte erkennt.
- Die Drehungen des Roboterarms werden nicht 100 % genau sein – Der Arm platziert die Scheibe manchmal an der falschen Stelle. Die Basis dreht sich nicht genau um 90 oder 180 Grad. Genauso wie Menschen nicht immer zu 100 % richtig liegen, werden auch die Builds nicht immer zu 100 % richtig sein. Dies kann ein lehrreicher Moment sein. Eine Untersuchung oder Diskussion darüber, wie die Schüler den Roboterarm verbessern könnten, könnte eine großartige ergänzende Aktivität sein!
Moderationsstrategien
- Dekonstruieren Sie vorherige Builds und arbeiten Sie in kleineren Gruppen - Wenn Sie zu den kleineren Gruppierungen für die Labore 4 und 5 zurückkehren möchten, können Sie das tun. Demontieren Sie alle Code Robot Arm-Builds (1-Achse) aus Labor 3 und lassen Sie jede kleinere Gruppe den Code Robot Arm (2-Achsen) für dieses Labor von Grund auf neu bauen. Dieser Build wird in Labor 5 erneut verwendet, die kleinere Gruppierung kann also gleich bleiben.
- Stellen Sie sich eine Bedingung als eine Richtig/Falsch-Frage vor. - Wenn die Schüler Schwierigkeiten haben, das Konzept einer Bedingung zu verstehen, helfen Sie ihnen, es als eine Richtig- oder Falsch-Frage zu formulieren. Beispielsweise wäre die Frage „Was ist Ihre Lieblingsfarbe?“ keine Bedingung, da die Antwort nicht „Richtig“ oder „Falsch“ sein kann. „Ihre Lieblingsfarbe ist Blau?“ könnte jedoch entweder „Wahr“ oder „Falsch“ sein und somit eine Bedingung darstellen. Lassen Sie die Schüler eine Liste mit Fragen im Zustandsstil zu Dingen, die sie sehen, erstellen, um das Zustandskonzept mit dem Augensensor im Labor zu verknüpfen.
- Hinweis: Der Roboterarm bewegt sich schnell und beim Bewegen um die Basis kann eine Scheibe vom Elektromagneten abgestoßen werden. Dies kann für Schüler überraschend (und lustig) sein.