
หมั้น
เปิดตัวส่วน Engage
ACTS คือสิ่งที่ครูจะทำ และ ASKS คือสิ่งที่ครูจะอำนวยความสะดวก
| การกระทำ | ถามคำถาม |
|---|---|
|
|
การเตรียมนักเรียนให้พร้อมสำหรับการสร้าง
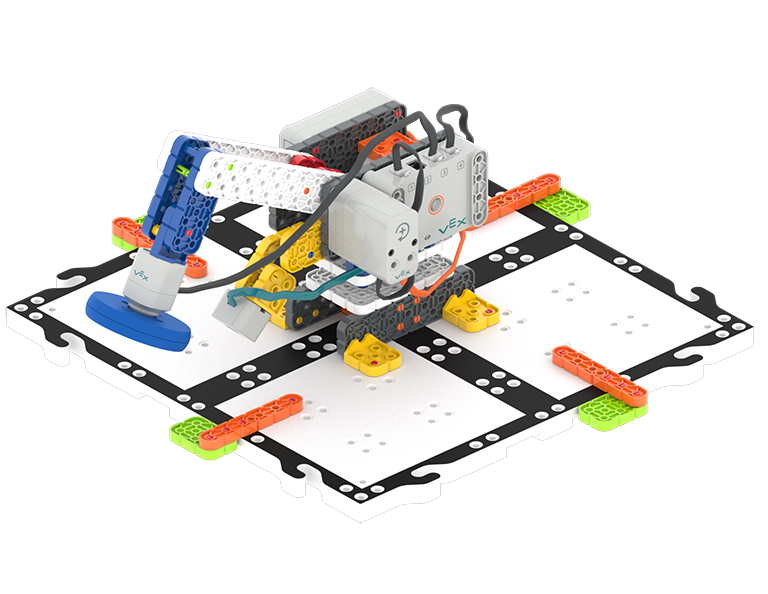
คุณคิดว่าเราจะสามารถใช้ Eye Sensor บนแขนหุ่นยนต์เพื่อให้มันฉลาดขึ้นได้อย่างไร? มาสร้างแขนหุ่นยนต์ (2 แกน) เพื่อช่วยเราค้นหากันเถอะ!
อำนวยความสะดวกในการสร้าง
-
สอนสอน
นักเรียนว่าพวกเขาจะประกอบแขนหุ่นยนต์ (2 แกน) ในวันนี้
และใช้มันเพื่อสำรวจว่าเซ็นเซอร์ตาสามารถใช้เพื่อช่วยให้แขนหุ่นยนต์ตรวจจับและเคลื่อนย้ายวัตถุได้อย่างไร
สร้างโค้ดแขนหุ่นยนต์ (2 แกน) นักเรียนควรเข้าร่วมกลุ่มของตนจากแล็บก่อนหน้า และกรอกแผ่นงานบทบาทหุ่นยนต์ & กิจวัตรประจำวัน ใช้สไลด์ความรับผิดชอบบทบาทที่แนะนำในภาพสไลด์โชว์ของแล็บเป็นแนวทางให้นักเรียนกรอกแผ่นงานนี้
- ส่งเสริมให้นักเรียนหมุนเวียนไปมาระหว่างบทบาทต่างๆ ของผู้สร้าง/นักข่าวที่พวกเขาได้รับการพัฒนามา
-
แจกจ่ายแจกจ่าย
แจกคำสั่งสร้างแขนหุ่นยนต์โค้ด (2 แกน) ให้กับแต่ละทีม
นักข่าวควรเก็บรวบรวมเอกสารตามรายการตรวจสอบ
-
อำนวยความสะดวกอำนวยความสะดวก
กระบวนการสร้างและการอภิปรายในขณะที่นักเรียนทำงาน
ผู้สร้างสามารถเริ่มการก่อสร้างได้ นักข่าวควรช่วยเหลือด้วยคำแนะนำในการสร้างตามความจำเป็น เพื่อกระตุ้นให้นักเรียนคิดเกี่ยวกับการทำงานของเซ็นเซอร์ตาบนแขน ให้ถามคำถาม เช่น
- วัตถุจะต้องอยู่ที่ไหนเพื่อให้เซ็นเซอร์ตาสามารถตรวจจับได้
- ทำไมคุณถึงคิดว่าเราวาง Eye Sensor ไว้ตรงนี้ตอนสร้าง?
- เสนอเสนอ ข้อเสนอแนะ และบันทึกกลยุทธ์การสร้างทีมและการแก้ปัญหาเชิงบวกในขณะที่ทีมต่างๆ สร้างร่วมกัน

การแก้ไขปัญหาสำหรับครู
- ตรวจสอบสายไฟและพอร์ต - เพื่อให้โครงการ VEXcode GO ทำงานได้ตามที่ตั้งใจไว้กับแขนหุ่นยนต์ สายไฟจากเซ็นเซอร์แต่ละตัวและมอเตอร์จะต้องได้รับการกำหนดค่าอย่างถูกต้อง หากนักเรียนประสบปัญหา ให้นักเรียนตรวจสอบสายไฟอีกครั้ง และตรวจสอบให้แน่ใจว่าตรงกับรายการพอร์ตเมื่อใด การกำหนดค่าแขนหุ่นยนต์ ใน VEXcode GO ดู การใช้เซ็นเซอร์ VEX GO บทความห้องสมุด VEX สำหรับ ข้อมูลเกี่ยวกับการเชื่อมต่อเซ็นเซอร์
- แก้ไขเซ็นเซอร์ตา - บางครั้งเซ็นเซอร์ตาจะตรวจจับแม่เหล็กไฟฟ้าแทนดิสก์ ในสถานการณ์ดังกล่าว โครงการอาจไม่สามารถแยกความแตกต่างระหว่างดิสก์สีน้ำเงินและสีเขียวได้ ลองเพิ่มบล็อก [รอ] หลังจากที่เซนเซอร์ตาตรวจพบดิสก์เป็นครั้งแรกเพื่อแก้ไขปัญหานี้
- การหมุนแขนหุ่นยนต์จะไม่แม่นยำ 100% - บางครั้งแขนจะวางดิสก์ในตำแหน่งที่ผิด ฐานจะไม่หมุนได้ 90 หรือ 180 องศาพอดี ในทำนองเดียวกันมนุษย์ไม่ได้ถูกต้อง 100% เสมอไป สิ่งที่สร้างขึ้นก็ไม่ถูกต้อง 100% เสมอไปเช่นกัน นี่อาจเป็นช่วงเวลาแห่งการสอน การสืบสวนหรือการอภิปรายเกี่ยวกับวิธีที่นักเรียนอาจปรับปรุงแขนหุ่นยนต์อาจเป็นกิจกรรมขยายความที่ยอดเยี่ยม!
กลยุทธ์การอำนวยความสะดวก
- ถอดโครงสร้างรุ่นก่อนหน้าและทำงานในกลุ่มย่อย - หากคุณต้องการกลับไปยังกลุ่มย่อยสำหรับห้องปฏิบัติการ 4 และ 5 คุณก็ทำได้ ถอดประกอบแขนหุ่นยนต์ Code Robot (แกน 1) ทั้งหมดจากแล็บ 3 และให้แต่ละกลุ่มย่อยสร้างแขนหุ่นยนต์ Code Robot (แกน 2) จากศูนย์สำหรับแล็บนี้ บิลด์นี้จะถูกนำมาใช้ใหม่อีกครั้งใน Lab 5 เพื่อให้กลุ่มย่อยยังคงเหมือนเดิมได้
- คิดว่าเงื่อนไขเป็นคำถามจริงหรือเท็จ - ถ้าหากนักเรียนมีปัญหาในการทำความเข้าใจแนวคิดของเงื่อนไข ให้ช่วยให้พวกเขากำหนดกรอบเป็นคำถามจริงหรือเท็จ ตัวอย่างเช่น "สีโปรดของคุณคือสีอะไร" จะไม่ถือเป็นเงื่อนไข เพราะไม่สามารถเป็นคำตอบแบบจริงหรือเท็จได้ “สีที่คุณชอบคือสีน้ำเงินใช่ไหม” อย่างไรก็ตาม อาจเป็นได้ทั้งจริงหรือเท็จ ดังนั้นจึงอาจเป็นเงื่อนไขได้ ให้เด็กนักเรียนระดมความคิดเป็นรายการคำถามเกี่ยวกับรูปแบบเงื่อนไขเกี่ยวกับสิ่งที่พวกเขาเห็นเพื่อช่วยเชื่อมโยงแนวคิดเกี่ยวกับเงื่อนไขกับเซ็นเซอร์ตาในห้องปฏิบัติการ
- หมายเหตุ: แขนหุ่นยนต์เคลื่อนไหวอย่างรวดเร็วและแผ่นดิสก์อาจจะหลุดออกจากแม่เหล็กไฟฟ้าเมื่อเคลื่อนที่ไปรอบฐาน นี่อาจเป็นเรื่องน่าแปลกใจ (และสนุก) สำหรับนักเรียน