
يخطب
قم بتشغيل قسم المشاركة
ACTS هو ما سيفعله المعلم و ASKS هو كيف سيقوم المعلم بتيسير العملية.
| أعمال | يسأل |
|---|---|
|
|
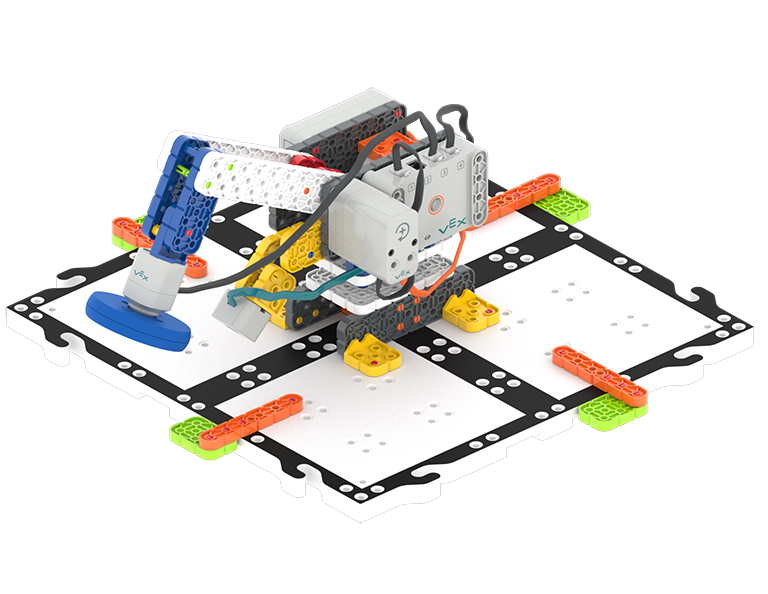
إعداد الطلاب للبناء
كيف تعتقد أنه يمكننا استخدام مستشعر العين الموجود على ذراع الروبوت لجعله أكثر ذكاءً؟ دعونا نبني ذراع الروبوت (ثنائي المحور) لمساعدتنا على اكتشاف ذلك!
تسهيل البناء
-
تعليماتأخبر
بأنهما سيقومان ببناء ذراع الروبوت (ثنائي المحور) اليوم، واستخدامه لاستكشاف كيفية استخدام
مستشعر العين لمساعدة ذراع الروبوت في اكتشاف الأشياء وتحريكها.
قم ببناء ذراع الروبوت البرمجية (محورين) يجب على الطلاب الانضمام إلى مجموعاتهم من المختبر السابق، واستكمال ورقة روتينات أدوار الروبوتات & استخدم شريحة مسؤوليات الأدوار المقترحة في عرض شرائح صور المختبر كدليل للطلاب لإكمال هذه الورقة.
- شجع الطلاب على التنقل بين أنواع أدوار البناء/الصحفي التي طوروها أيضًا.
-
توزيعتوزيع
تعليمات بناء ذراع الروبوت (محورين) لكل فريق. ينبغي للصحفيين جمع المواد الموجودة في قائمة
المراجعة.
-
تسهيلتسهيل
عملية البناء والمناقشات أثناء عمل الطلاب.
يمكن للبنائين البدء في البناء. ينبغي للصحفيين المساعدة في تعليمات البناء حسب الحاجة. لتحفيز الطلاب على التفكير في كيفية عمل مستشعر العين على الذراع، اطرح أسئلة مثل:
- أين يجب أن يكون الكائن حتى يتمكن مستشعر العين من اكتشافه؟
- لماذا تعتقد أننا وضعنا مستشعر العين هنا في المبنى؟
- عرضعرض اقتراحات ولاحظ استراتيجيات إيجابية لبناء الفريق وحل المشكلات أثناء بناء الفرق معًا.

استكشاف أخطاء المعلم وإصلاحها
- التحقق من الأسلاك والمنافذ - لكي تعمل مشاريع VEXcode GO على النحو المقصود مع الذراع الروبوتية، يجب تكوين الأسلاك من كل من أجهزة الاستشعار والمحرك بشكل صحيح. إذا كان الطلاب يواجهون صعوبة، فافعل ذلك قم بفحص الأسلاك جيدًا وتأكد من مطابقتها لقائمة المنافذ متىتكوين ذراع الروبوت في VEXcode GO. انظر استخدام أجهزة الاستشعار VEX GO مقالة مكتبة فيكس ل معلومات حول توصيل أجهزة الاستشعار.
- إصلاح مستشعر العين - في بعض الأحيان، يكتشف مستشعر العين المغناطيس الكهربائي بدلاً من القرص. في هذه الحالة، قد لا يتمكن المشروع من التمييز بين القرص الأزرق والأخضر. حاول إضافة كتلة [انتظار] بعد أن يكتشف مستشعر العين القرص لأول مرة لحل هذه المشكلة.
- لن تكون عمليات دوران ذراع دقيقة بنسبة 100% - قد يضع الذراع القرص في المكان الخطأ في بعض الأحيان. لن تدور القاعدة بدقة 90 أو 180 درجة. تمامًا كما أن البشر ليسوا على صواب بنسبة 100% من الوقت، فإن الإصدارات لن تكون صحيحة بنسبة 100% من الوقت. يمكن أن تكون هذه لحظة تعليمية. يمكن أن يكون التحقيق أو المناقشة حول كيفية تحسين الطلاب لذراع الروبوت نشاطًا توسعيًا رائعًا!
استراتيجيات التيسير
- تفكيك الإصدارات السابقة والعمل في مجموعات أصغر - إذا كنت ترغب في العودة إلى المجموعات الأصغر للمختبرين 4 و5، فيمكنك القيام بذلك. قم بتفكيك جميع عمليات بناء ذراع الروبوت البرمجية (محور واحد) من المختبر 3، واطلب من كل مجموعة أصغر بناء ذراع الروبوت البرمجية (محورين) من الصفر لهذا المختبر. سيتم استخدام هذا البناء مرة أخرى في المختبر 5، لذلك يمكن أن تظل المجموعة الأصغر كما هي.
- فكر في الشرط كسؤال صواب/خطأ - إذا كان الطلاب يواجهون صعوبة في فهم مفهوم الشرط، ساعدهم في صياغته كسؤال صواب أو خطأ. على سبيل المثال، "ما هو لونك المفضل؟" لن يكون شرطًا، لأنه لا يمكن أن تكون إجابة صحيحة/خاطئة. "لونك المفضل هو الأزرق؟" ومع ذلك، يمكن أن تكون إما صحيحة أو خاطئة، وبالتالي يمكن أن تكون شرطًا. اطلب من الطلاب إجراء عصف ذهني لقائمة من أسئلة نمط الحالة حول الأشياء التي يرونها للمساعدة في ربط مفهوم الحالة بمستشعر العين في المختبر.
- ملاحظة: يتحرك ذراع الروبوت بسرعة وقد ينفصل القرص عن المغناطيس الكهربائي عندما يتحرك حول القاعدة. قد يكون هذا مفاجئًا (وممتعًا) للطلاب.