
Angaje etmek
Engage Bölümünü Başlatın
ACTS öğretmenin ne yapacağını, ASKS ise öğretmenin nasıl kolaylaştıracağını belirtir.
| EYLEMLER | SORUYOR |
|---|---|
|
|
Öğrencileri İnşa Etmeye Hazırlamak
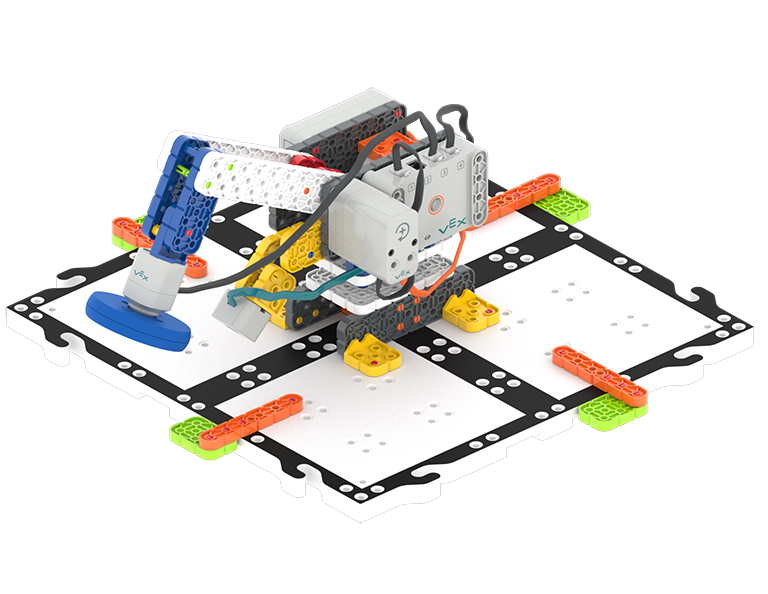
Robot Kolundaki Göz Sensörünü kullanarak onu daha akıllı hale nasıl getirebileceğimizi düşünüyorsunuz? Bunu bulmamıza yardımcı olmak için Robot Kolunu (2 Eksenli) inşa edelim!
İnşaatı Kolaylaştırın
-
Talimat
öğrenciye bugün Robot Kolunu (2 Eksenli) inşa edeceklerini ve bunu Göz Sensörünün Robot Kolunun nesneleri algılamasına ve hareket ettirmesine nasıl yardımcı olabileceğini keşfetmek için kullanacaklarını söyleyin.
Kod Robot Kolunu Oluşturun (2 Eksenli) Öğrenciler önceki Lab'daki gruplarına katılmalı ve Robotik Roller & Rutinler sayfasını tamamlamalıdır. Öğrencilerin bu sayfayı tamamlamaları için kılavuz olarak Laboratuvar Görüntü Slayt Gösterisi'ndeki Önerilen Rol Sorumlulukları slaydını kullanın.
- Öğrencileri, geliştirdikleri Oluşturucu/Gazeteci rolleri arasında geçiş yapmaya teşvik edin.
-
Kod Dağıt Robot Kolu (2 Eksenli) Oluşturma Talimatlarını her takıma dağıtın. Gazeteciler kontrol listesindeki materyalleri toplamalıdır.
-
Öğrenciler çalışırken
inşa sürecini ve tartışmaları kolaylaştırın.
İnşaatçılar inşaat yapmaya başlayabilir. Gazeteciler gerektiğinde bina talimatlarına yardımcı olmalıdır. Öğrencileri Göz Sensörünün Kol üzerinde nasıl çalıştığını düşünmeye sevk etmek için aşağıdaki gibi sorular sorun:
- Göz Sensörünün algılayabilmesi için bir nesnenin nerede olması gerekir?
- Göz Sensörünü neden yapının üzerine yerleştirdiğimizi düşünüyorsunuz?
- Öneriler sunun ve ekipler bir araya geldikçe olumlu ekip oluşturma ve problem çözme stratejilerini not edin.

Öğretmen Sorun Giderme
- Telleri ve Bağlantı Noktalarını Kontrol Edin - VEXcode GO projelerinin Robot Kol ile amaçlandığı gibi çalışması için, sensörlerin ve motorların her birinden gelen tellerin doğru şekilde yapılandırılması gerekir. If students are having difficulty, have them double check the wires and make sure that they match the list of ports when configuring the Robot Arm in VEXcode GO. Sensörlerin bağlanması hakkında bilgi için bkz. Vex GO Sensörlerinin Kullanımı VEX Kitaplığı Makalesi.
- Göz Sensörü FIX - Bazen Göz Sensörü Disk yerine Elektromıknatısı algılar. Bu durumda proje mavi ve yeşil disk arasında ayrım yapamayabilir. Bunu çözmek için Göz Sensörü bir Diski ilk algıladıktan sonra bir [Bekle] bloğu eklemeyi deneyin.
- Robot Kolu dönüşleri %100 doğru olmayacaktır -Kol bazen diski yanlış yere koyacaktır. Taban tam olarak 90 veya 180 derece dönmeyecektir. Tıpkı insanların zamanın % 100 'ünde doğru olmaması gibi, yapılar da zamanın % 100' ünde doğru olmayacaktır. Bu öğretilebilir bir an olabilir. Öğrencilerin Robot Kolunu nasıl geliştirebileceklerine dair bir araştırma veya tartışma harika bir genişletme etkinliği olabilir!
Kolaylaştırma Stratejileri
- Önceki Yapıları Çözün ve Daha Küçük Gruplarda Çalışın - Laboratuvar 4 ve 5 için daha küçük gruplara dönmek isterseniz, bunu yapabilirsiniz. Laboratuvar 3 'ten oluşturulan tüm Kod Robot Kolunu (1 Eksen) sök ve her küçük grubun bu Laboratuvar için Kod Robot Kolunu (2 Eksen) sıfırdan oluşturmasını sağla. Bu yapı Laboratuvar 5 'te tekrar kullanılacaktır, böylece daha küçük gruplandırma aynı kalabilir.
- Bir Koşulu Doğru/Yanlış Sorusu Olarak Düşünün - Öğrenciler bir koşul kavramını anlamakta zorlanıyorsa, bunu Doğru veya Yanlış sorusu olarak çerçevelemelerine yardımcı olun. Örneğin, “En sevdiğiniz renk nedir ?” bir koşul olmayacaktır, çünkü Doğru/Yanlış cevabı olamaz. "En sevdiğin renk mavi mi ?" Ancak, Doğru veya Yanlış olabilir, bu yüzden bir koşul olabilir. Öğrencilerin, durum kavramını Laboratuvardaki Göz Sensörüne bağlamaya yardımcı olmak için gördükleri şeyler hakkında bir durum stili soruları listesi üzerinde beyin fırtınası yapmalarını sağlayın.
- Not:Robot Kolu hızlı hareket eder ve Elektromıknatıs taban etrafında hareket ettiğinde bir disk ondan düşebilir. Bu öğrenciler için şaşırtıcı (ve eğlenceli) olabilir.