
Erbij betrekken
Start de Engage-sectie
ACTS is wat de leraar zal doen en ASKS is hoe de leraar zal faciliteren.
| HANDELINGEN | VRAAGT |
|---|---|
|
|
De studenten klaarmaken voor de bouw
Hoe denk je dat we de oogsensor op de robotarm kunnen gebruiken om deze intelligenter te maken? Laten we de robotarm (2-assig) bouwen om daarachter te komen!
Faciliteer de bouw
-
InstructieGeef
leerlingen de opdracht om vandaag de robotarm (2-assig) te bouwen en deze te gebruiken om te ontdekken hoe de oogsensor kan worden gebruikt om de robotarm te helpen objecten te detecteren en te verplaatsen.
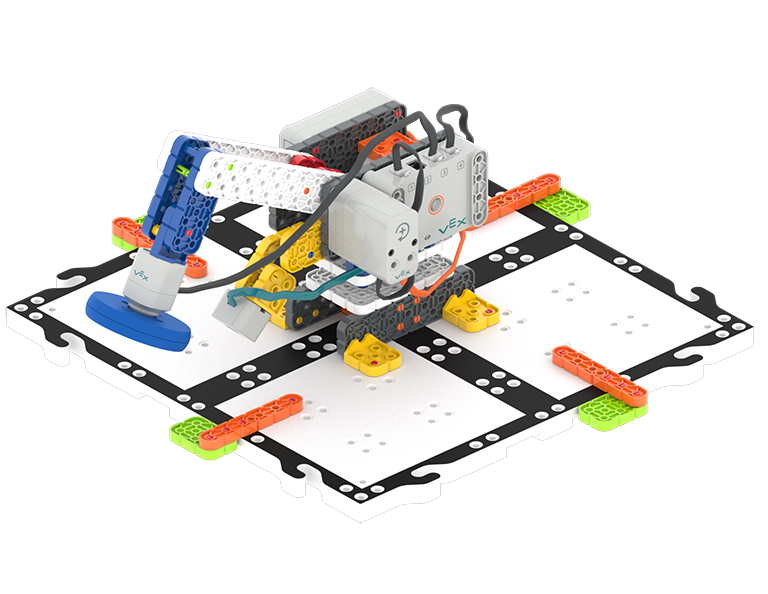
Bouw de coderobotarm (2-assig) Studenten voegen zich bij hun groepen uit het vorige lab en vullen het werkblad Robotics Roles & Routines in. Gebruik de dia 'Voorgestelde rolverantwoordelijkheden' in de diavoorstelling 'Lab-afbeeldingen' als leidraad voor studenten bij het invullen van dit werkblad.
- Moedig studenten aan om ook te roteren tussen de soorten rollen van bouwer/journalist die ze hebben ontwikkeld.
-
Distribueer
Code Robotarm (2-assig) Bouwinstructies aan elk team. Journalisten moeten de materialen op de checklist verzamelen.
-
FaciliterenFaciliteren
van bouwproces en discussies terwijl studenten werken.
Bouwers kunnen beginnen met bouwen. Journalisten moeten indien nodig helpen met bouwinstructies. Om leerlingen te laten nadenken over hoe de oogsensor op de arm werkt, stel je vragen als:
- Waar zou een object moeten zijn om de oogsensor het te laten detecteren?
- Waarom denk je dat we de oogsensor hier op de build hebben geplaatst?
- Bied suggesties aan en noteer positieve strategieën voor teambuilding en probleemoplossing terwijl teams samen bouwen.

Problemen van docenten oplossen
- Controleer de draden en poorten - Om de VEXcode GO-projecten te laten werken zoals bedoeld met de robotarm, moeten de draden van elk van de sensoren en motor correct worden geconfigureerd. Als leerlingen problemen ondervinden, laat ze dan de draden dubbel controleren en ervoor zorgen dat ze overeenkomen met de lijst met poorten het configureren van Robot Arm in VEXcode GO. Zie het artikel De VEX GO-sensoren gebruiken VEX-BIBLIOTHEEK voor informatie over het aansluiten van sensoren.
- Oogsensor fix - Soms detecteert de oogsensor de elektromagneet in plaats van de schijf. In deze situatie mag het project geen onderscheid maken tussen de blauwe en groene schijf. Probeer een [Wait] -blok toe te voegen nadat de oogsensor eerst een schijf detecteert om dit op te lossen.
- De robotarm draait niet 100% nauwkeurig. -De arm plaatst de schijf soms op de verkeerde plek. De basis zal niet precies 90 of 180 graden draaien. Net zoals mensen niet 100% van de tijd correct zijn, zullen de builds niet 100% van de tijd correct zijn. Dit kan een leerzaam moment zijn. Een onderzoek of discussie over hoe studenten de robotarm kunnen verbeteren, kan een geweldige uitbreidingsactiviteit zijn!
Faciliterende strategieën
- Deconstrueer eerdere builds en werk in kleinere groepen - Als u wilt terugkeren naar de kleinere groepen voor Labs 4 en 5, kunt u dat doen. Deconstrueer alle code-robotarm (1-as) uit lab 3 en laat elke kleinere groep de code-robotarm (2-as) vanaf nul bouwen voor dit lab. Deze build zal opnieuw worden gebruikt in Lab 5, zodat de kleinere groepering hetzelfde kan blijven.
- Beschouw een voorwaarde als een ware/valse vraag - Als studenten moeite hebben om het concept van een voorwaarde te begrijpen, help hen dan om het in te kaderen als een ware of valse vraag. Bijvoorbeeld: "Wat is je favoriete kleur?" zou geen voorwaarde zijn, omdat het geen Waar/Onwaar-antwoord kan zijn. "Je favoriete kleur is blauw?" kan echter waar of onwaar zijn, dus het kan een aandoening zijn. Laat leerlingen brainstormen over een lijst met vragen over conditiestijlen over dingen die ze zien om het conditieconcept te helpen verbinden met de oogsensor in het lab.
- Opmerking:De robotarm beweegt snel en er kan een schijf van de elektromagneet worden gestoten wanneer deze rond de basis beweegt. Dit kan verrassend (en leuk) zijn voor studenten.