
Ingaggiare
Avvia la sezione Engage
ACTS è ciò che l'insegnante farà, mentre ASKS è il modo in cui l'insegnante agevolerà il lavoro.
| ATTI | CHIEDE |
|---|---|
|
|
Preparare gli studenti a costruire
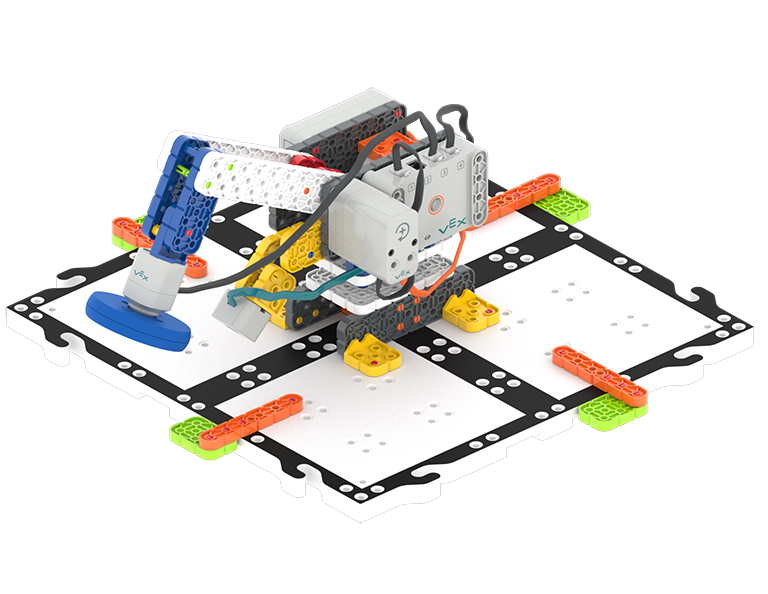
Come pensi che potremmo usare il sensore oculare sul braccio robotico per renderlo più intelligente? Per scoprirlo, costruiamo il braccio robotico (a 2 assi)!
Facilitare la costruzione
-
InsegnaInsegna
studenti che oggi costruiranno il braccio robotico (a 2 assi) e lo useranno per scoprire
come il sensore oculare può essere utilizzato per aiutare il braccio robotico a rilevare e
spostare oggetti.
Costruisci il braccio robotico del codice (2 assi) Gli studenti devono unirsi ai loro gruppi del Lab precedente e completare il foglio Routine dei ruoli di robotica & Utilizzare la diapositiva Responsabilità dei ruoli suggerite nella presentazione delle immagini del Lab come guida per gli studenti per completare questo foglio.
- Incoraggiate anche gli studenti a ruotare tra i ruoli di Costruttore/Giornalista che hanno sviluppato.
-
DistribuisciDistribuisci
Istruzioni per la costruzione del braccio robotico (2 assi) a ciascun team. I giornalisti
devono raccogliere il materiale presente nella checklist.
-
FacilitareFacilitare
il processo di costruzione e le discussioni mentre gli studenti lavorano.
I costruttori possono iniziare a costruire. I giornalisti dovrebbero fornire assistenza con le istruzioni di montaggio, se necessario. Per stimolare gli studenti a riflettere sul funzionamento del sensore oculare sul braccio, poni domande come:
- Dove dovrebbe trovarsi un oggetto affinché il sensore oculare possa rilevarlo?
- Perché pensi che abbiamo posizionato il sensore oculare in questa posizione nella build?
- OffertaOfferta suggerimenti e nota strategie positive di team building e risoluzione dei problemi man mano che i team lavorano insieme.

Risoluzione dei problemi dell'insegnante
- Controllare i cavi e le porte - Affinché i progetti VEXcode GO funzionino come previsto con il braccio robotico, i cavi di ciascun sensore e motore devono essere configurati correttamente. Se gli studenti hanno difficoltà, chiedi loro di ricontrollare i cavi e di accertarsene corrispondono all'elenco delle porte quando configurazione del braccio robotico nel codice VEX GO. Vedi il Utilizzo dei sensori VEX GO Articolo della Biblioteca VEX per informazioni sul collegamento dei sensori.
- Correzione del sensore oculare - A volte il sensore oculare rileva l'elettromagnete anziché il disco. In questa situazione, il progetto potrebbe non distinguere tra il disco blu e quello verde. Per risolvere questo problema, prova ad aggiungere un blocco [Wait] dopo che il sensore oculare rileva per la prima volta un disco.
- Le rotazioni del braccio robotico non saranno precise al 100% - A volte il braccio metterà il disco nel punto sbagliato. La base non ruoterà esattamente di 90 o 180 gradi. Proprio come gli esseri umani non hanno ragione nel 100% dei casi, anche le build non saranno corrette nel 100% dei casi. Questo può essere un momento di apprendimento. Un'indagine o una discussione su come gli studenti potrebbero migliorare il braccio robotico potrebbe essere un'ottima attività di approfondimento!
Strategie di facilitazione
- Smontare le build precedenti e lavorare in gruppi più piccoli - Se vuoi tornare ai raggruppamenti più piccoli per i laboratori 4 e 5, puoi farlo. Smontare tutti i Code Robot Arm (1 asse) creati nel Lab 3 e chiedere a ogni gruppo più piccolo di costruire da zero il Code Robot Arm (2 assi) per questo Lab. Questa build verrà riutilizzata nel Lab 5, in modo che il raggruppamento più piccolo possa rimanere invariato.
- Considera una condizione come una domanda Vero/Falso - Se gli studenti hanno difficoltà a comprendere il concetto di una condizione, aiutali a formularla come una domanda Vero o Falso. Ad esempio, "Qual è il tuo colore preferito?" non sarebbe una condizione, perché non potrebbe essere una risposta Vero/Falso. "Il tuo colore preferito è il blu?" tuttavia, potrebbe essere Vero o Falso, quindi potrebbe essere una condizione. Chiedi agli studenti di fare un brainstorming su un elenco di domande di tipo "condizione" su cose che vedono, per aiutarli a collegare il concetto di condizione al sensore oculare nel laboratorio.
- Nota: il braccio robotico si muove rapidamente e un disco potrebbe staccarsi dall'elettromagnete quando si muove attorno alla base. Questo può essere sorprendente (e divertente) per gli studenti.