
Zapojte se
Spusťte sekci Zapojení
ČINY jsou to, co učitel udělá, a PTÁ SE, jak učitel bude vést.
| SKUTKY | PTÁ SE |
|---|---|
|
|
Příprava studentů na stavbu
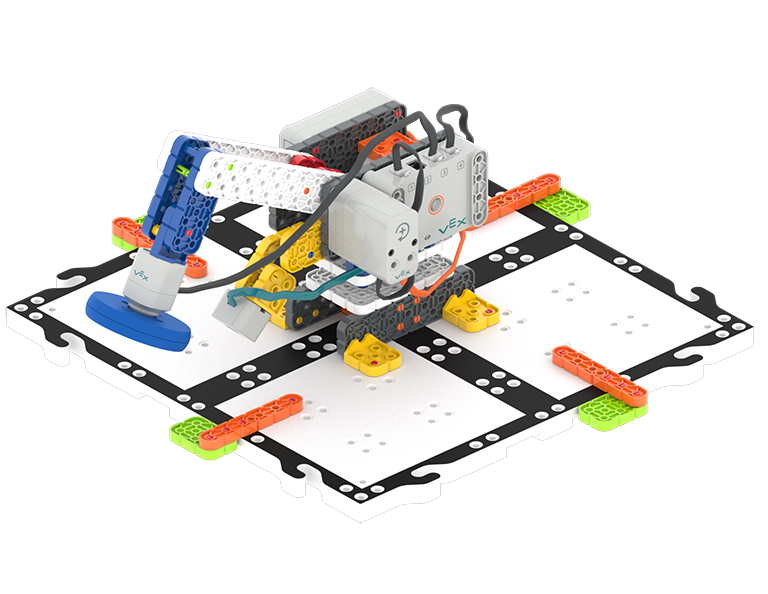
Jak si myslíte, že můžeme využít oční senzor na robotickém rameni, abychom ho učinili inteligentnějším? Pojďme si postavit robotické rameno (2osé), abychom to zjistili!
Usnadněte si stavbu
-
InstrukceInstruujte
studenty, že dnes postaví robotické rameno (2osé) a že s jeho pomocí prozkoumají, jak lze pomocí očního senzoru pomoci robotickému rameni detekovat a pohybovat objekty.
Sestavte robotické rameno s kódem (2osé) Studenti by se měli připojit ke svým skupinám z předchozího laboratoře a vyplnit list Role & Rutiny v robotice. Jako vodítko pro studenty při vyplňování tohoto listu použijte snímek s navrhovanými pracovními povinnostmi v prezentaci s obrázky z laboratoře.
- Povzbuzujte studenty, aby se střídali mezi druhy rolí tvůrců/novinářů, které si také vytvořili.
-
Distribuujte instrukce k sestavení distribučního
kódu robotického ramene (2osé) každému týmu. Novináři by měli shromáždit materiály na kontrolním seznamu.
-
Usnadněte proces
budování a diskuse, zatímco studenti pracují.
Stavitelé mohou začít stavět. Novináři by měli podle potřeby pomáhat s návodem na sestavení. Vyzvěte studenty, aby přemýšleli o tom, jak funguje oční senzor na paži, a položili jim otázky jako:
- Kde by musel být objekt, aby jej oční senzor detekoval?
- Proč si myslíte, že jsme umístili oční senzor sem na stavbu?
- NabídnoutNabídnout návrhy a zaznamenat pozitivní strategie budování týmu a řešení problémů při společném budování týmů.

Odstraňování problémů učitele
- Zkontrolujte vodiče a porty - Aby projekt VEXcode GO fungoval s robotickým ramenem tak, jak má, musí být vodiče z každého ze senzorů a motoru správně nakonfigurovány. Pokud mají studenti potíže, nechte je dvakrát zkontrolovat vodiče a ujistit se, že konfiguraci robotického ve VEXcode GO odpovídají seznamu portů. Informace o připojení senzorů naleznete v článku Použití VEX GO Sensors VEX Library.
- Oprava očního senzoru - Někdy oční senzor detekuje elektromagnet namísto disku. V této situaci nemusí projekt rozlišovat mezi modrým a zeleným diskem. Zkuste přidat blok [Wait] poté, co oční senzor nejprve detekuje disk, abyste to vyřešili.
- Otáčení robotického ramene nebude 100% přesné -Rameno někdy umístí disk na špatné místo. Základna se nebude otáčet přesně o 90 nebo 180 stupňů. Stejně jako lidé nemají pravdu 100% času, sestavení nebudou mít pravdu 100% času. Může to být poučný okamžik. Vyšetřování nebo diskuse o tom, jak by studenti mohli vylepšit robotické rameno, by mohla být skvělá rozšiřující aktivita!
Strategie usnadnění
- Dekonstrukce předchozích sestav a práce v menších skupinách - Pokud se chcete vrátit k menším seskupením pro laboratoře 4 a 5, můžete. Deconstruct all Code Robot Arm (1-Axis) builds from Lab 3, and have each smaller group build the Code Robot Arm (2-Axis) from scratch for this Lab. Tato sestava bude znovu použita v laboratoři 5, takže menší seskupení může zůstat stejné.
- Myslete na podmínku jako na pravdivou/nepravdivou otázku - Pokud se studenti snaží pochopit pojem podmínky, pomozte jim ji zformulovat jako pravdivou nebo nepravdivou otázku. Například „Jaká je vaše oblíbená barva?“ by nebyla podmínkou, protože by to nemohla být pravda/nepravda. „Tvá oblíbená barva je modrá?“ Může to však být pravda nebo nepravda, takže to může být podmínka. Požádejte studenty, aby vymysleli seznam otázek o stavu, které se týkají věcí, které vidí, aby pomohli propojit koncept stavu s očním senzorem v laboratoři.
- Poznámka:Robotické rameno se pohybuje rychle a při pohybu elektromagnetu kolem základny může z něj upadnout disk. To může být pro studenty překvapivé (a zábavné).