
Hành vi của Robot - C++
![]() Mẹo dành cho giáo viên
Mẹo dành cho giáo viên
Như đã đề cập trước đó, hành vi là cách nói về hành động của robot. Một cách để giúp học sinh suy nghĩ về hành vi và tổ chức các hành động theo trình tự là yêu cầu học sinh dán nhãn các phần khác nhau của dự án bằng cách sử dụngbình luận. Học sinh có thể dán nhãn các hành vi khác nhau từ những thử thách trong suốt dự án.
Hãy xem xét một ví dụ đơn giản về thử thách chơi trò đuổi bắt. Học sinh được yêu cầu lập trình cho robot rẽ nhanh để tránh bị chạm, lái chậm để chạm vào ai đó, rồi lại rẽ nhanh lần nữa để chạy trốn. Xem ví dụ bên dưới về cách sử dụngbình luậnđể mô tả trình tự hành vi:
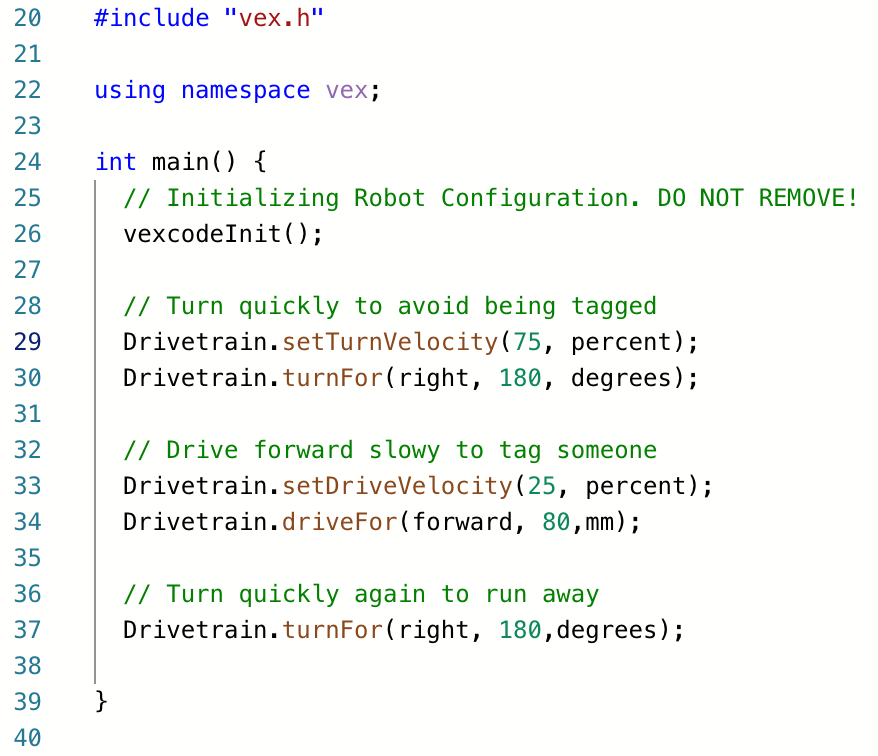
Lưu ý rằng mô tả về hành vi được viết bằng ngôn ngữ đơn giản và các bình luận chỉ nắm bắt các thành phần riêng lẻ (tức là quay nhanh, lái xe về phía trước chậm và quay chậm) của hành vi lớn hơn (chơi trò đuổi bắt).
Thực hành tốt là yêu cầu học sinh giải thích cách các em sẽ lập kế hoạch cho những thử thách này theo cách các em muốn và mong đợi robot hoạt động.