
الدرس 3: عند اكتشاف اللون الأحمر
لا توجد أوامر لإخبار روبوت الواقع الافتراضي بما يجب فعله بمجرد اكتشاف اللون الأحمر. لتجنب الحد الأحمر، يجب أن ينعكس روبوت الواقع الافتراضي ويدور بمجرد اكتشافه للون الأحمر.
- أضف كتلة [Drive for] و [Turn for] إلى نهاية الرمز للسماح لروبوت الواقع الافتراضي بالعكس والدوران بمجرد أن يكتشف مستشعر العين السفلي اللون الأحمر.

- افتح ملعب Dynamic Castle Crasher وقم بتشغيل المشروع.
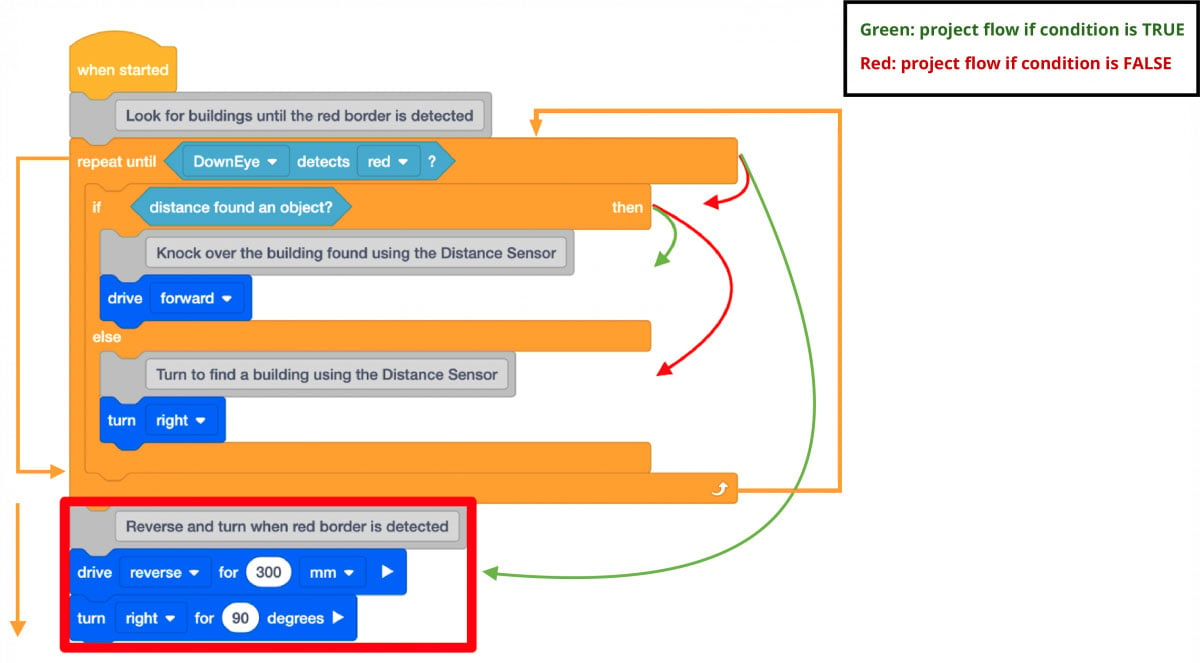
- عند تشغيل هذا المشروع، هناك شرطان يتم التحقق منهما. الأول هو حالة مستشعر العين السفلية الذي يكتشف اللون الأحمر داخل كتلة [Repeat until]. لاحظ أن تدفق المشروع ينتقل إلى الحالة التالية للكائن الذي يتم اكتشافه فقط إذا كان مستشعر العين السفلية لا يرى اللون الأحمر. إذا اكتشف مستشعر العين السفلي اللون الأحمر، فإن تدفق المشروع يتخطى كتلة [إذا كان الأمر كذلك] ويقفز إلى القيادة في الاتجاه المعاكس والدوران.
-
بمجرد أن يكتشف مستشعر العين السفلية اللون الأحمر، سيقود روبوت الواقع الافتراضي في الاتجاه المعاكس، ثم ينعطف، ثم يتوقف لأن هذا هو نهاية تدفق المشروع. لا يوجد مانع يستخدم لتكرار السلوكيات مرة أخرى.

- هناك حاجة إلى كتلة [إلى الأبد] من أجل تكرار السلوكيات في حلقة. أضف كتلة [Forever] إلى الرمز.

-
عند تشغيل هذا المشروع، سيقود روبوت الواقع الافتراضي نحو مبنى تم اكتشافه وينعطف يمينًا إذا لم يتم الإبلاغ عن أي مباني. بمجرد أن يكتشف مستشعر العين السفلية اللون الأحمر، يتحرك روبوت الواقع الافتراضي في الاتجاه المعاكس، ويدور، ويستمر في القيادة نحو مبنى آخر.
