
บทเรียนที่ 3: เมื่อตรวจพบสีแดง
ไม่มีคำสั่งที่จะบอกหุ่นยนต์ VR ว่าจะทำอย่างไรเมื่อตรวจพบสีแดง เพื่อหลีกเลี่ยงขอบสีแดงหุ่นยนต์ VR ควรย้อนกลับและหมุนเมื่อตรวจพบสีแดง
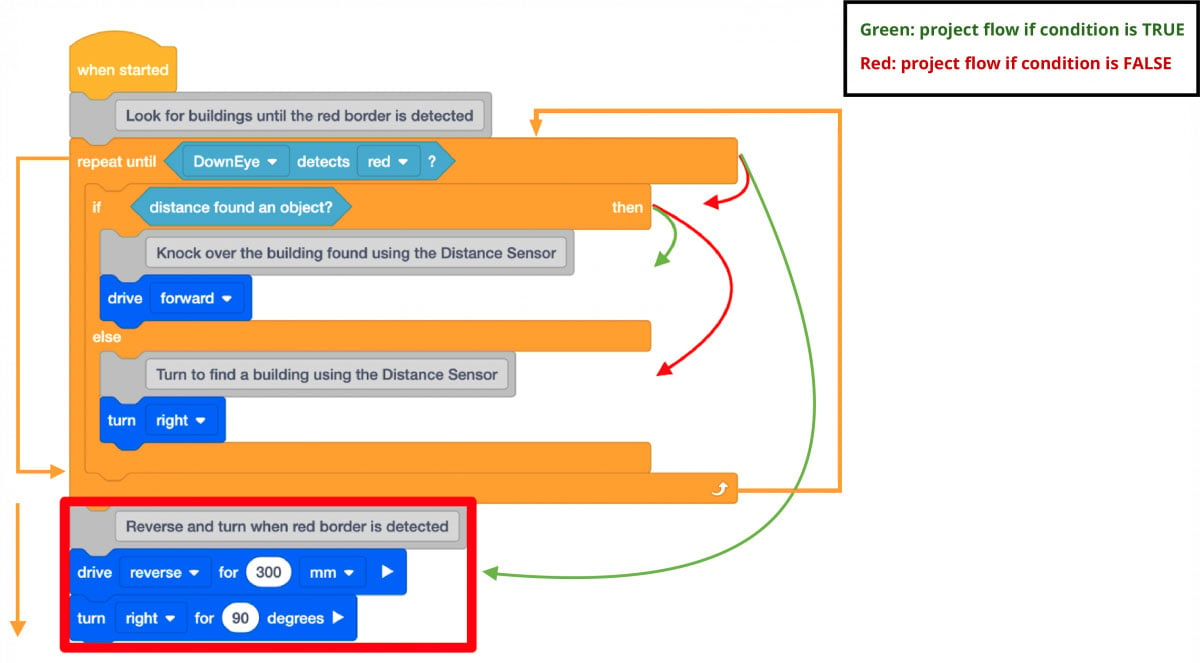
- เพิ่มบล็อก [Drive for] และ [Turn for] ที่ส่วนท้ายของรหัสเพื่อให้หุ่นยนต์ VR สามารถย้อนกลับและหมุนได้เมื่อเซ็นเซอร์ตรวจจับดวงตาลงตรวจพบสีแดง

- เปิด Dynamic Castle Crasher Playground และดำเนินโครงการ
- เมื่อโครงการนี้ดำเนินการมีสองเงื่อนไขที่ตรวจสอบแล้ว ประการแรกคือเงื่อนไขของเซ็นเซอร์ตรวจจับดวงตาลงที่ตรวจจับสีแดงภายในบล็อก [ทำซ้ำจนกว่าจะถึง] โปรดทราบว่าการไหลของโครงการจะเคลื่อนที่ไปยังสภาวะถัดไปของวัตถุที่ถูกตรวจพบ เฉพาะใน กรณีที่เซ็นเซอร์ดวงตาลงไม่เห็นสีแดง หากเซ็นเซอร์ตรวจจับดวงตาลงตรวจพบสีแดงการไหลของโครงการจะข้ามบล็อก [ถ้าเป็นเช่นนั้น] และข้ามไปที่การขับรถในทางกลับกันและการเลี้ยว
-
เมื่อ Down Eye Sensor ตรวจพบสีแดงหุ่นยนต์ VR จะขับกลับด้านเลี้ยวจากนั้นหยุดเนื่องจากนั่นคือจุดสิ้นสุดของการไหลของโครงการ ไม่มีการปิดกั้นที่ใช้เพื่อทำพฤติกรรมซ้ำอีก

- จำเป็นต้องมีบล็อก [ตลอดไป] เพื่อให้พฤติกรรมทำซ้ำในลูป เพิ่มบล็อค [Forever] ลงในรหัส

-
เมื่อโครงการนี้ทำงานหุ่นยนต์ VR จะขับไปยังอาคารที่ตรวจพบและเลี้ยวขวาหากไม่มีรายงานอาคาร เมื่อเซ็นเซอร์ดวงตาลงตรวจพบสีแดงหุ่นยนต์ VR จะขับในทางกลับกันเลี้ยวและขับต่อไปยังอาคารอื่น
