
3과: 빨간색이 감지되었을 때
VR 로봇이 빨간색을 감지하면 무엇을 해야 하는지 알려주는 명령은 없습니다. 빨간색 테두리를 피하기 위해 VR 로봇은 빨간색을 감지하면 후진하여 방향을 바꿔야 합니다.
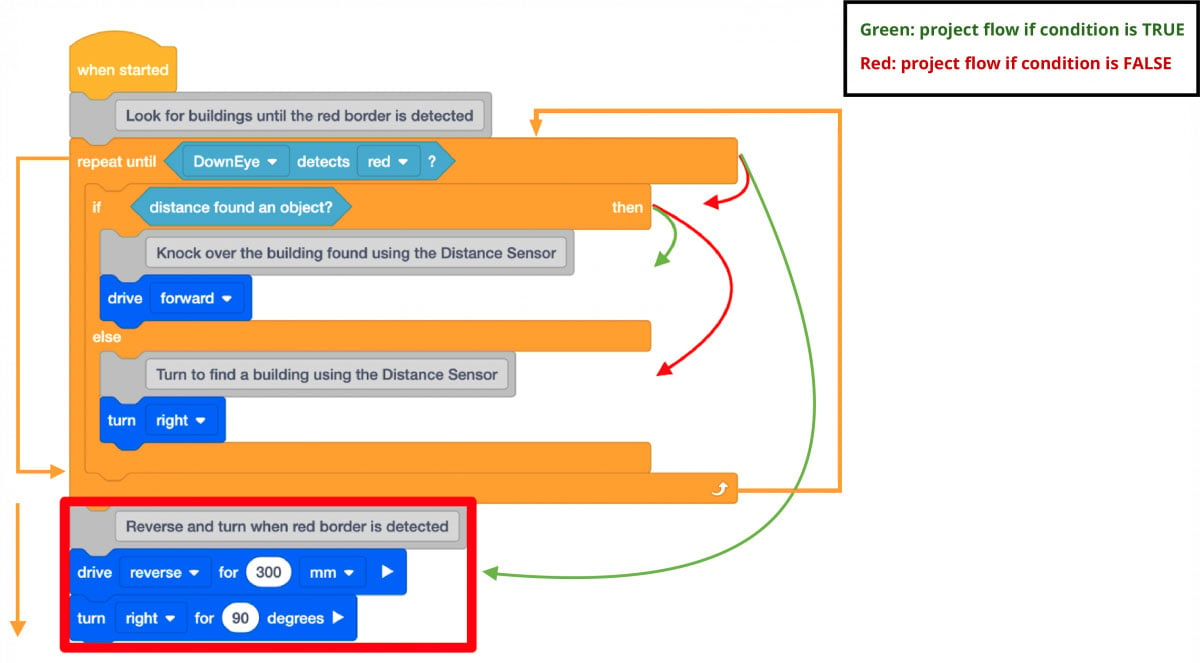
- VR 로봇이 다운 아이 센서가 빨간색을 감지하면 후진 및 회전할 수 있도록 코드 끝에 [주행] 및 [회전] 블록을 추가합니다.

- Dynamic Castle Crasher Playground 을 열고 프로젝트를 실행합니다.
- 이 프로젝트를 실행하면 두 가지 조건이 확인됩니다. 첫 번째는 [반복] 블록 안에서 다운 아이 센서가 빨간색을 감지하는 조건입니다. 다운 아이 센서가 빨간색을 감지하지 못하면 프로젝트 흐름이 다음 감지 조건인 에서 로 넘어갑니다. 다운 아이 센서가 빨간색을 감지하면 프로젝트 흐름은 [If then else] 블록을 건너뛰고 후진 주행 및 회전으로 넘어갑니다.
-
다운 아이 센서가 빨간색을 감지하면 VR 로봇은 후진하여 방향을 바꾸고 멈춥니다. 이것으로 프로젝트 흐름이 끝납니다. 행동을 다시 반복하는 데 사용되는 블록은 없습니다.

- 동작을 루프로 반복하려면 [Forever] 블록이 필요합니다. 코드에 [Forever] 블록을 추가합니다.

-
이 프로젝트가 실행되면 VR 로봇은 감지된 건물을 향해 주행하고, 건물이 보고되지 않으면 우회전합니다. 다운 아이 센서가 빨간색을 감지하면 VR 로봇은 후진하여 방향을 바꾸고 다른 건물을 향해 계속 주행합니다.
