
पाठ 3: जब लाल रंग का पता चला
वी.आर. रोबोट को यह बताने के लिए कोई आदेश नहीं है कि लाल रंग का पता चलने पर उसे क्या करना है। लाल बॉर्डर से बचने के लिए, वीआर रोबोट को लाल रंग का पता चलते ही पीछे मुड़ जाना चाहिए।
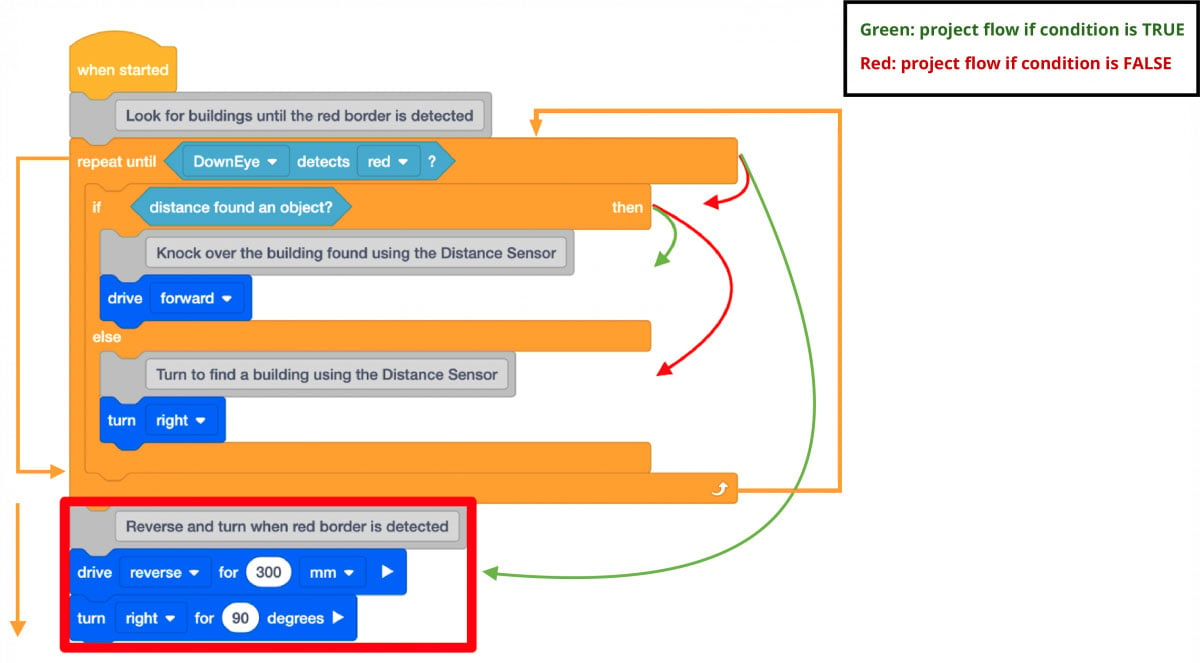
- कोड के अंत में [ड्राइव फॉर] और [टर्न फॉर] ब्लॉक जोड़ें, ताकि डाउन आई सेंसर द्वारा लाल रंग का पता चलने पर वीआर रोबोट पीछे की ओर मुड़ सके।

- डायनेमिक कैसल क्रैशर प्लेग्राउंड खोलें और प्रोजेक्ट चलाएं।
- जब यह परियोजना चलाई जाती है, तो दो शर्तों की जाँच की जाती है। पहली स्थिति डाउन आई सेंसर द्वारा [Repeat until] ब्लॉक के अंदर लाल रंग का पता लगाने की है। ध्यान दें कि यदि डाउन आई सेंसर लाल रंग नहीं देखता है तो प्रोजेक्ट प्रवाह अगली स्थिति केवल पर चला जाता है। यदि डाउन आई सेंसर लाल रंग का पता लगाता है, तो प्रोजेक्ट प्रवाह [यदि तो अन्यथा] ब्लॉक को छोड़ देता है और रिवर्स में ड्राइविंग और मोड़ पर चला जाता है।
-
एक बार जब डाउन आई सेंसर लाल रंग का पता लगा लेता है, तो वीआर रोबोट रिवर्स में चलेगा, मुड़ेगा, फिर रुक जाएगा क्योंकि यह प्रोजेक्ट प्रवाह का अंत है। व्यवहार को दोबारा दोहराने के लिए किसी ब्लॉक का उपयोग नहीं किया जाता है।

- व्यवहारों को लूप पर दोहराने के लिए एक [Forever] ब्लॉक की आवश्यकता होती है। कोड में [Forever] ब्लॉक जोड़ें.

-
जब यह परियोजना चलाई जाएगी, तो वीआर रोबोट किसी ज्ञात इमारत की ओर जाएगा और यदि कोई इमारत नहीं दिखाई देगी तो दाईं ओर मुड़ जाएगा। जब डाउन आई सेंसर लाल रंग का पता लगा लेता है, तो वीआर रोबोट रिवर्स में चला जाता है, मुड़ता है, और दूसरी इमारत की ओर बढ़ना जारी रखता है।
