
Bài 3: Khi phát hiện màu đỏ
Không có lệnh nào cho Robot VR biết phải làm gì khi phát hiện màu đỏ. Để tránh đường viền màu đỏ, VR Robot phải đảo ngược và rẽ khi phát hiện ra màu đỏ.
- Thêm khối [Lái tới] và [Quay tới] vào cuối mã để cho phép Robot VR lùi và quay khi Cảm biến mắt nhìn xuống phát hiện màu đỏ.

- Mở Dynamic Castle Crasher Playground và chạy dự án.
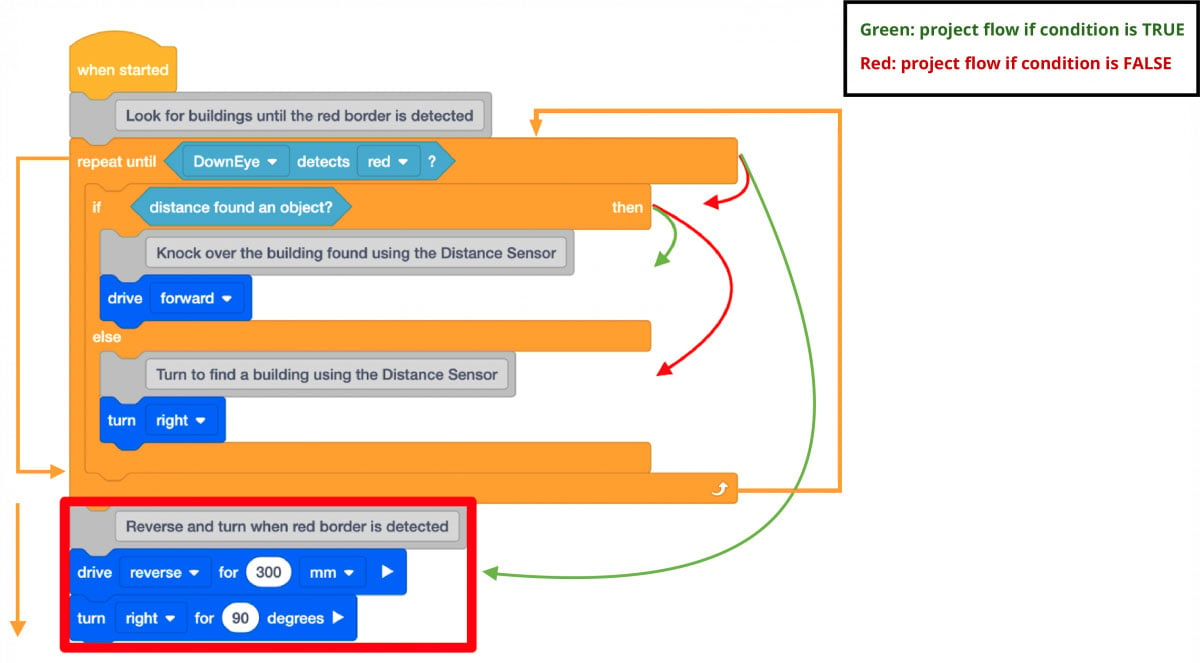
- Khi dự án này được chạy, có hai điều kiện được kiểm tra. Đầu tiên là tình trạng Cảm biến mắt xuống phát hiện màu đỏ bên trong khối [Lặp lại cho đến]. Lưu ý rằng luồng dự án sẽ chuyển sang điều kiện tiếp theo của đối tượng được phát hiện CHỈ nếu Cảm biến mắt nhìn xuống không nhìn thấy màu đỏ. Nếu Cảm biến mắt xuống phát hiện màu đỏ, luồng dự án sẽ bỏ qua khối [Nếu thì nếu không] và chuyển sang lái xe lùi và rẽ.
-
Khi cảm biến mắt xuống phát hiện màu đỏ, VR Robot sẽ lái ngược lại, rẽ rồi dừng lại vì đó là điểm kết thúc của dự án. Không có khối nào được sử dụng để lặp lại hành vi.

- Cần có khối [Mãi mãi] để các hành vi được lặp lại theo vòng lặp. Thêm khối [Mãi mãi] vào mã.

-
Khi dự án này được chạy, VR Robot sẽ di chuyển về phía tòa nhà được phát hiện và rẽ phải nếu không có tòa nhà nào được báo cáo. Khi cảm biến mắt nhìn xuống phát hiện màu đỏ, VR Robot sẽ lái ngược lại, quay lại và tiếp tục lái về phía tòa nhà khác.
