
Leçon 3 : Lorsque la couleur rouge est détectée
Il n'y a pas de commandes pour dire au robot VR quoi faire une fois qu'il détecte la couleur rouge. Afin d'éviter la bordure rouge, le robot VR doit faire marche arrière et tourner une fois qu'il détecte la couleur rouge.
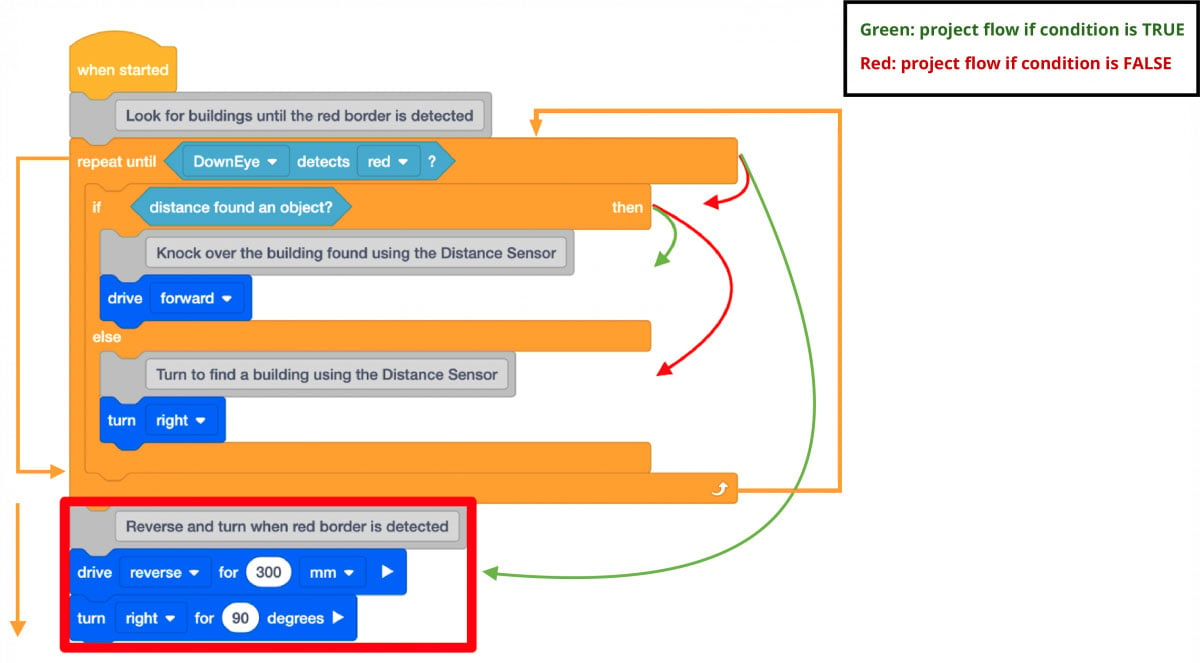
- Ajoutez un bloc [Drive for] et [Turn for] à la fin du code pour permettre au robot VR de faire marche arrière et de tourner une fois que le capteur Down Eye détecte la couleur rouge.

- Ouvrez le terrain de jeu Dynamic Castle Crasher et exécutez le projet.
- Lorsque ce projet est exécuté, deux conditions sont vérifiées. Le premier est l'état du capteur Down Eye détectant la couleur rouge à l'intérieur du bloc [Repeat until]. Notez que le flux du projet passe à l'état suivant d'un objet détecté UNIQUEMENT si le capteur Down Eye ne voit pas la couleur rouge. Si le capteur Down Eye détecte du rouge, le flux du projet saute le bloc [If then else] et passe à la conduite en marche arrière et en virage.
-
Une fois que le capteur Down Eye détecte la couleur rouge, le robot VR roule en marche arrière, tourne, puis s'arrête car c'est la fin du flux du projet. Aucun bloc n'est utilisé pour répéter les comportements.

- Un bloc [Forever] est nécessaire pour que les comportements se répètent en boucle. Ajoutez un bloc [Forever] au code.

-
Lorsque ce projet est exécuté, le robot VR se dirigera vers un bâtiment détecté et tournera à droite si aucun bâtiment n'est signalé. Une fois que le capteur Down Eye détecte la couleur rouge, le robot VR roule en marche arrière, tourne et continue de rouler vers un autre bâtiment.

Questions
Veuillez sélectionner un lien ci-dessous pour accéder au questionnaire de la leçon.
Google Doc / .docx / .pdf