
Lección 3: Cuando se detecta el color rojo
No hay comandos para decirle al robot VR qué hacer una vez que detecta el color rojo. Para evitar el borde rojo, el robot VR debe dar marcha atrás y girar una vez que detecte el color rojo.
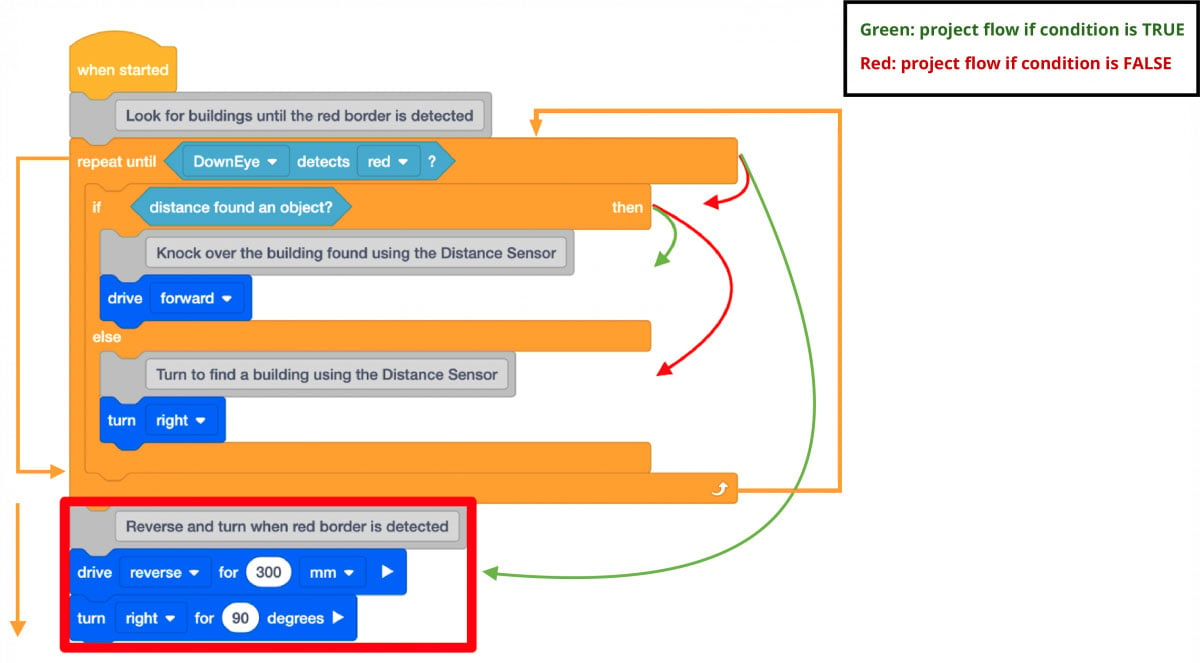
- Añada un bloque [Drive for] y [Turn for] al final del código para permitir que el robot VR invierta y gire una vez que el sensor Down Eye detecte el color rojo.

- Abre el Dynamic Castle Crasher Playground y ejecuta el proyecto.
- Cuando se ejecuta este proyecto, hay dos condiciones que se comprueban. La primera es la condición del sensor Down Eye que detecta el color rojo dentro del bloque [Repetir hasta]. Tenga en cuenta que el flujo del proyecto pasa a la siguiente condición de un objeto que se detecta SOLO si el sensor Down Eye no ve el color rojo. Si el sensor Down Eye detecta rojo, el flujo del proyecto omite el bloque [If then else] y salta a la marcha atrás y gira.
-
Una vez que el sensor Down Eye detecta el color rojo, el robot VR se moverá en reversa, girará y luego se detendrá, ya que ese es el final del flujo del proyecto. No se utiliza ningún bloque para repetir los comportamientos de nuevo.

- Se necesita un bloque [Forever] para que los comportamientos se repitan en un bucle. Añade un bloque [Forever] al código.

-
Cuando se ejecuta este proyecto, el robot VR se dirigirá hacia un edificio detectado y girará a la derecha si no se informa de edificios. Una vez que el sensor Down Eye detecta el color rojo, el robot VR funciona en reversa, gira y continúa conduciendo hacia otro edificio.

Preguntas
Seleccione un enlace a continuación para acceder al cuestionario de la lección.
Google Doc / .docx / .pdf