
പാഠം 3: ചുവപ്പ് നിറം കണ്ടെത്തുമ്പോൾ
ചുവപ്പ് നിറം കണ്ടെത്തിയാൽ എന്തുചെയ്യണമെന്ന് വിആർ റോബോട്ടിനോട് പറയാൻ കമാൻഡുകളൊന്നുമില്ല. ചുവന്ന ബോർഡർ ഒഴിവാക്കാൻ, ചുവപ്പ് നിറം തിരിച്ചറിഞ്ഞാൽ VR റോബോട്ട് പിന്നിലേക്ക് തിരിച്ച് തിരിയണം.
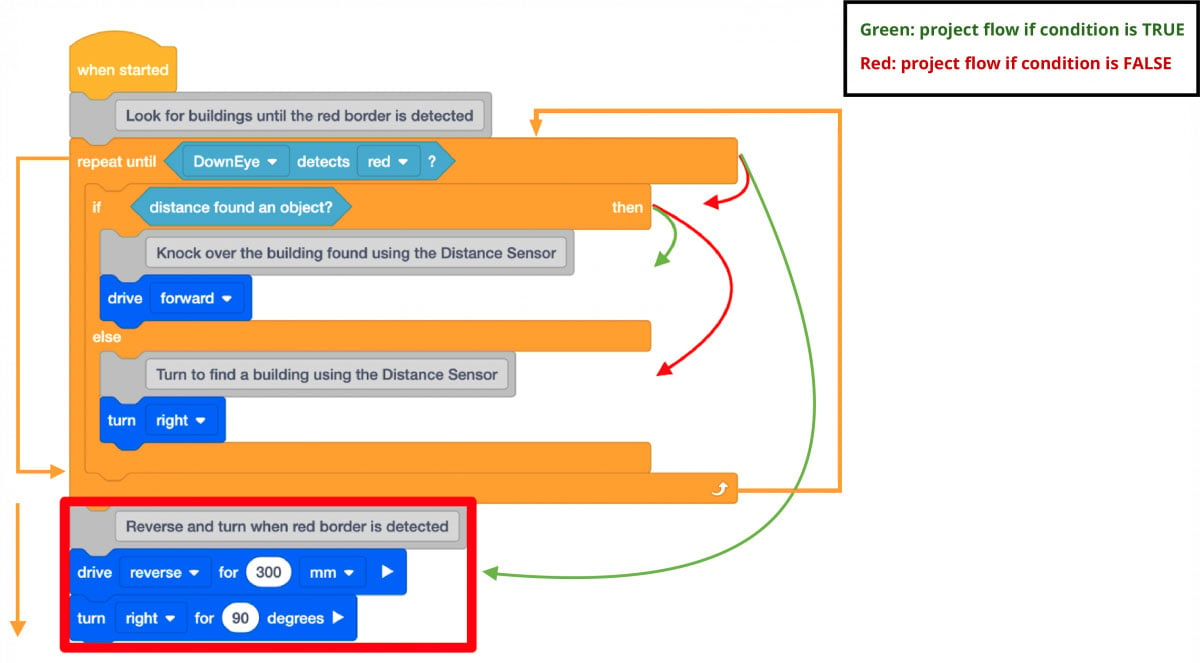
- കോഡിന്റെ അവസാനം ഒരു [Drive for] ഉം [Turn for] ബ്ലോക്കും ചേർക്കുക, അതുവഴി VR റോബോട്ടിനെ റിവേഴ്സ് ചെയ്യാനും ഡൗൺ ഐ സെൻസർ ചുവപ്പ് നിറം കണ്ടെത്തുമ്പോൾ തിരിയാനും കഴിയും.

- ഡൈനാമിക് കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട് തുറന്ന് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
- ഈ പ്രോജക്റ്റ് നടപ്പിലാക്കുമ്പോൾ, രണ്ട് നിബന്ധനകൾ പരിശോധിക്കുന്നു. ആദ്യത്തേത് [Repeat until] ബ്ലോക്കിന്റെ ഉള്ളിലെ ചുവപ്പ് നിറം കണ്ടെത്തുന്ന ഡൗൺ ഐ സെൻസറിന്റെ അവസ്ഥയാണ്. ഡൗൺ ഐ സെൻസർ ചുവപ്പ് നിറം കാണുന്നില്ലെങ്കിൽ, പ്രോജക്റ്റ് ഫ്ലോ കണ്ടെത്തുന്ന ഒരു വസ്തുവിന്റെ അടുത്ത അവസ്ഥയിലേക്ക് മാത്രം അവസ്ഥയിലേക്ക് നീങ്ങുമെന്ന് ശ്രദ്ധിക്കുക. ഡൗൺ ഐ സെൻസർ ചുവപ്പ് നിറം കണ്ടെത്തിയാൽ, പ്രോജക്റ്റ് ഫ്ലോ [If then else] ബ്ലോക്ക് ഒഴിവാക്കി റിവേഴ്സിലും ടേണിംഗിലും ഡ്രൈവിംഗിലേക്ക് നീങ്ങും.
-
ഡൗൺ ഐ സെൻസർ ചുവപ്പ് നിറം തിരിച്ചറിഞ്ഞുകഴിഞ്ഞാൽ, വിആർ റോബോട്ട് പിന്നിലേക്ക് ഡ്രൈവ് ചെയ്യും, തിരിയും, തുടർന്ന് നിർത്തും, കാരണം അവിടെയാണ് പ്രോജക്റ്റ് ഫ്ലോ അവസാനിക്കുന്നത്. പെരുമാറ്റരീതികൾ വീണ്ടും ആവർത്തിക്കാൻ ഒരു ബ്ലോക്കും ഉപയോഗിക്കുന്നില്ല.

- ഒരു ലൂപ്പിൽ പെരുമാറ്റങ്ങൾ ആവർത്തിക്കുന്നതിന് ഒരു [Forever] ബ്ലോക്ക് ആവശ്യമാണ്. കോഡിലേക്ക് ഒരു [Forever] ബ്ലോക്ക് ചേർക്കുക.

-
ഈ പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുമ്പോൾ, VR റോബോട്ട് കണ്ടെത്തിയ ഒരു കെട്ടിടത്തിലേക്ക് ഓടിച്ചെല്ലുകയും കെട്ടിടങ്ങളൊന്നും റിപ്പോർട്ട് ചെയ്തിട്ടില്ലെങ്കിൽ വലത്തേക്ക് തിരിയുകയും ചെയ്യും. ഡൗൺ ഐ സെൻസർ ചുവപ്പ് നിറം തിരിച്ചറിഞ്ഞുകഴിഞ്ഞാൽ, വിആർ റോബോട്ട് പിന്നിലേക്ക് നീങ്ങി, തിരിഞ്ഞ് മറ്റൊരു കെട്ടിടത്തിലേക്ക് നീങ്ങുന്നത് തുടരുന്നു.

ചോദ്യങ്ങൾ
പാഠ ക്വിസ് ആക്സസ് ചെയ്യുന്നതിന് താഴെയുള്ള ലിങ്ക് തിരഞ്ഞെടുക്കുക.