
Pelajaran 3: Saat Warna Merah Terdeteksi
Tidak ada perintah untuk memberi tahu Robot VR apa yang harus dilakukan setelah mendeteksi warna merah. Untuk menghindari batas merah, Robot VR harus berbalik dan berputar setelah mendeteksi warna merah.
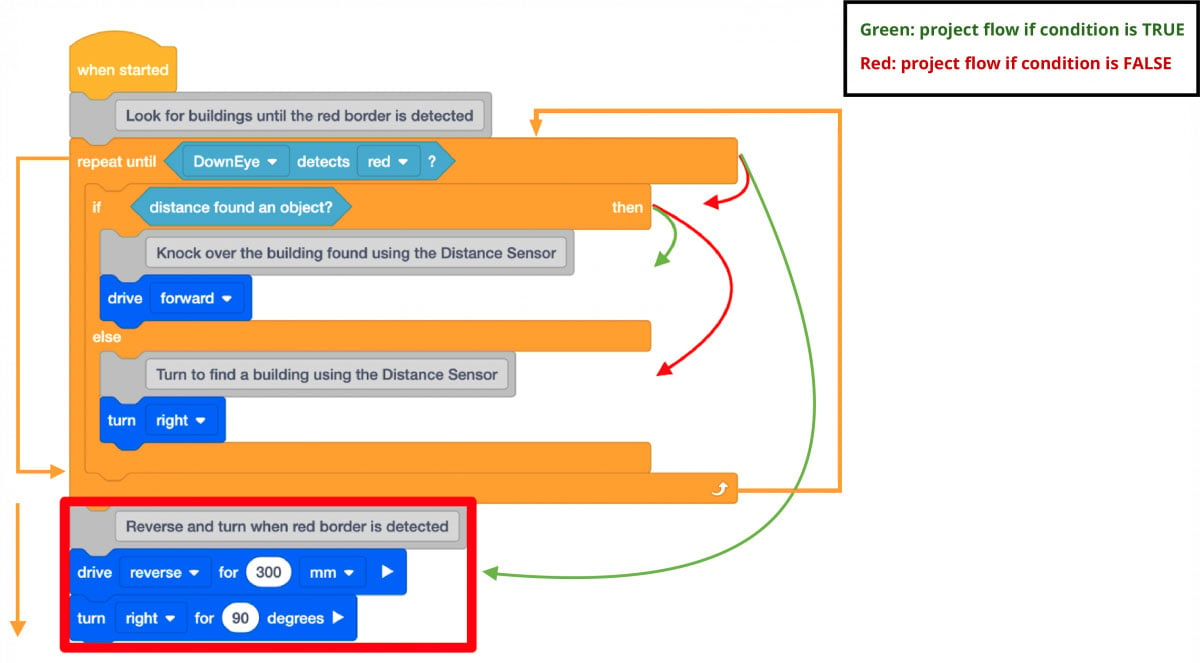
- Tambahkan blok [Drive for] dan [Turn for] di akhir kode untuk memungkinkan Robot VR mundur dan berputar setelah Sensor Mata Bawah mendeteksi warna merah.

- Buka Dynamic Castle Crasher Playground dan jalankan proyeknya.
- Saat proyek ini dijalankan, ada dua kondisi yang diperiksa. Yang pertama adalah kondisi Sensor Mata Bawah mendeteksi warna merah di dalam blok [Ulangi sampai]. Perhatikan bahwa alur proyek berpindah ke kondisi berikutnya dari suatu objek yang terdeteksi HANYA jika Sensor Mata Bawah tidak melihat warna merah. Jika Sensor Mata Bawah mendeteksi warna merah, aliran proyek akan melewati blok [Jika maka yang lain] dan langsung beralih ke gerakan mundur dan berbelok.
-
Setelah Sensor Mata Bawah mendeteksi warna merah, Robot VR akan bergerak mundur, berbelok, lalu berhenti karena itulah akhir alur proyek. Tidak ada blok yang digunakan untuk mengulang perilaku tersebut lagi.

- Blok [Selamanya] diperlukan agar perilaku dapat berulang secara berulang. Tambahkan blok [Forever] ke kode.

-
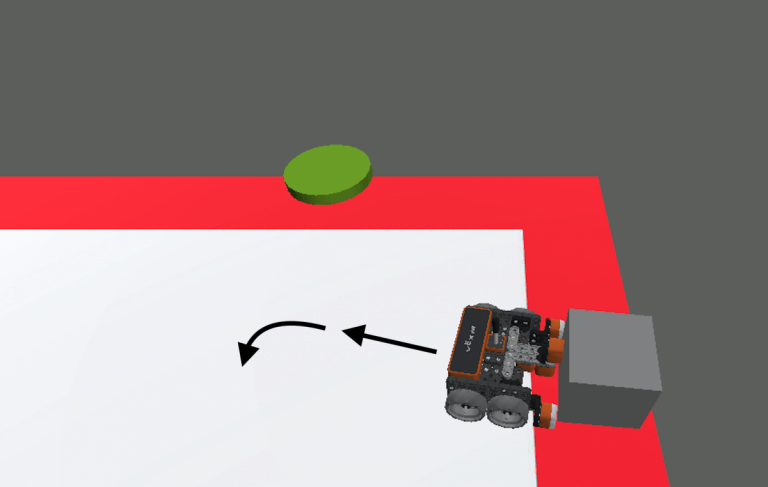
Saat proyek ini dijalankan, Robot VR akan melaju menuju bangunan yang terdeteksi dan berbelok kanan jika tidak ada bangunan yang dilaporkan. Setelah Sensor Mata Bawah mendeteksi warna merah, Robot VR melaju mundur, berbelok, dan terus melaju menuju gedung lain.
