
Lektion 3: Wenn die Farbe Rot erkannt wird
Es gibt keine Befehle, die dem VR-Roboter sagen, was er tun soll, sobald er die Farbe Rot erkennt. Um den roten Rand zu vermeiden, sollte der VR-Roboter umkehren und sich drehen, sobald er die Farbe Rot erkennt.
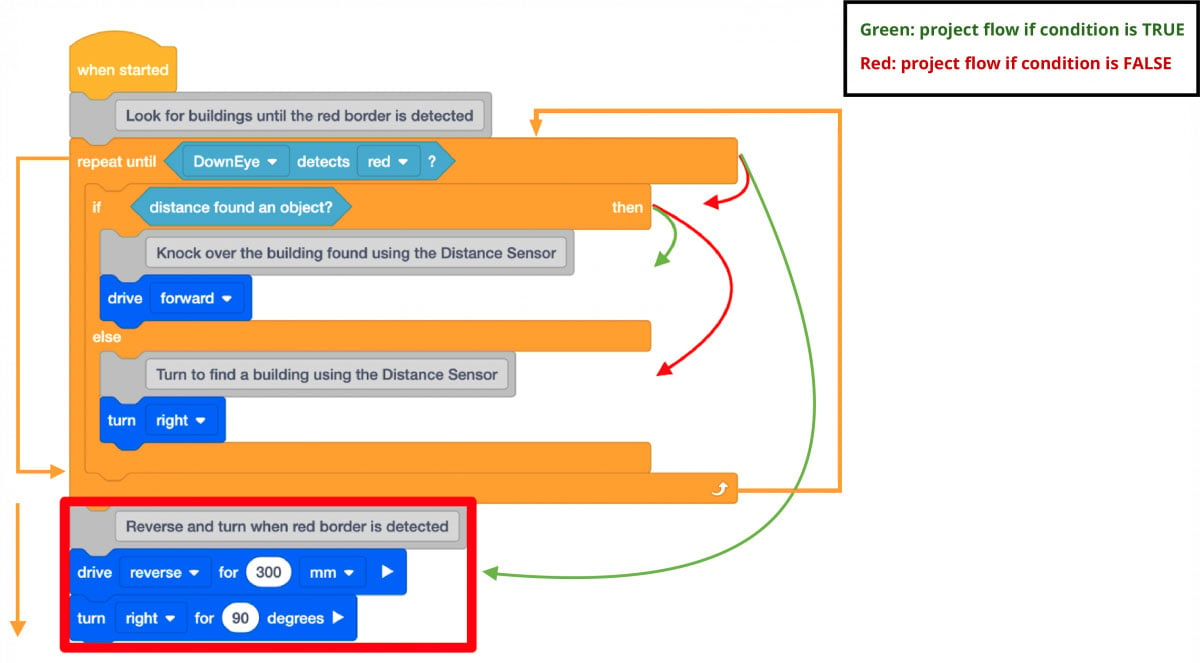
- Fügen Sie am Ende des Codes einen [Drive for] - und [Turn for] -Block hinzu, damit der VR-Roboter rückwärts fahren und sich drehen kann, sobald der Down Eye Sensor die Farbe Rot erkennt.

- Öffne den Dynamic Castle Crasher Playground und führe das Projekt aus.
- Wenn dieses Projekt ausgeführt wird, werden zwei Bedingungen überprüft. Der erste ist der Zustand des Down Eye Sensors, der die Farbe Rot im Inneren des Blocks [Wiederholen bis] erkennt. Beachten Sie, dass der Projektablauf NUR dann zum nächsten Zustand eines erkannten Objekts wechselt , wenn der Down Eye Sensor die Farbe Rot nicht sieht. Wenn der Down Eye Sensor Rot erkennt, überspringt der Projektablauf den Block [If then else] und springt zum Rückwärtsfahren und Wenden.
-
Sobald der Down Eye Sensor die Farbe Rot erkennt, fährt der VR-Roboter rückwärts, dreht sich und stoppt dann, da dies das Ende des Projektablaufs ist. Es wird kein Block verwendet, um die Verhaltensweisen erneut zu wiederholen.

- Ein [Forever] -Block ist erforderlich, damit sich die Verhaltensweisen in einer Schleife wiederholen. Fügen Sie dem Code einen [Forever] -Block hinzu.

-
Wenn dieses Projekt ausgeführt wird, fährt der VR-Roboter auf ein erkanntes Gebäude zu und biegt rechts ab, wenn keine Gebäude gemeldet werden. Sobald der Down Eye Sensor die Farbe Rot erkennt, fährt der VR-Roboter rückwärts, dreht sich und fährt weiter auf ein anderes Gebäude zu.

Fragen
Bitte wählen Sie unten einen Link aus, um auf das Lektionsquiz zuzugreifen.
Google Doc / .docx / .pdf