
পাঠ ৩: যখন লাল রঙ সনাক্ত করা হয়
লাল রঙ শনাক্ত করার পর ভিআর রোবটকে কী করতে হবে তা বলার জন্য কোনও নির্দেশ নেই। লাল সীমানা এড়াতে, VR রোবটটি লাল রঙ শনাক্ত করার সাথে সাথে উল্টে যাবে এবং ঘুরে যাবে।
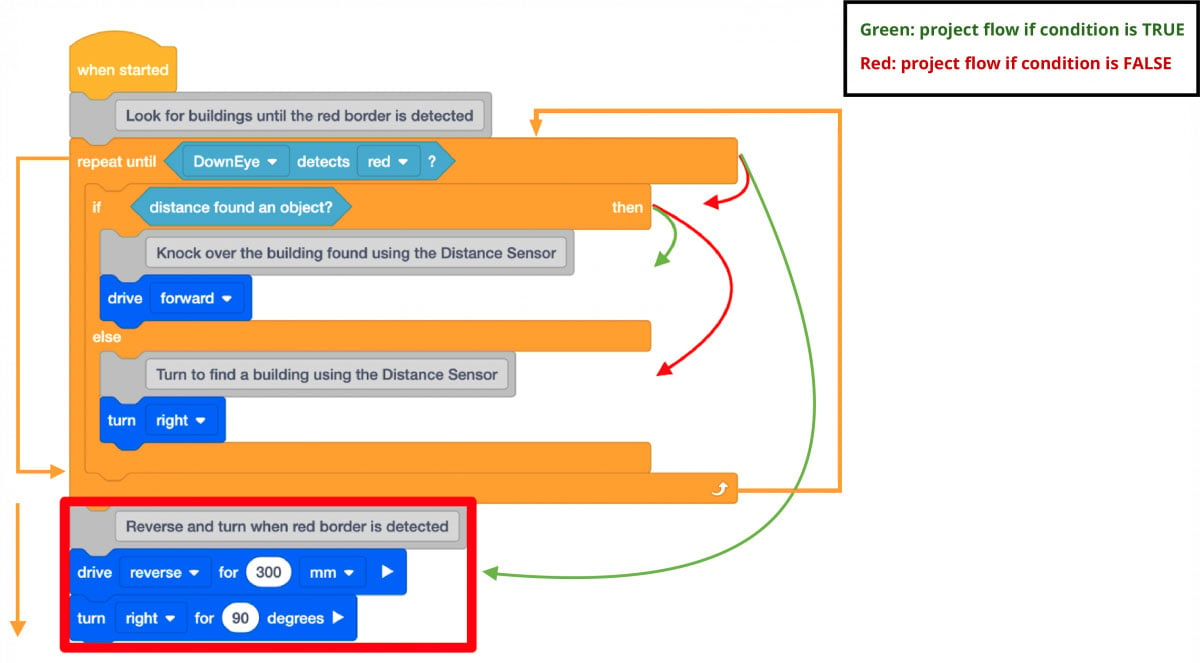
- ডাউন আই সেন্সর একবার লাল রঙ শনাক্ত করলে VR রোবটটিকে বিপরীত এবং ঘুরতে দেওয়ার জন্য কোডের শেষে একটি [ড্রাইভ ফর] এবং [টার্ন ফর] ব্লক যোগ করুন।

- ডায়নামিক ক্যাসেল ক্র্যাশার প্লেগ্রাউন্ড খুলুন এবং প্রকল্পটি চালান।
- যখন এই প্রকল্পটি চালানো হয়, তখন দুটি শর্ত আছে যা চেক করা হয়। প্রথমটি হল ডাউন আই সেন্সরের অবস্থা যা ব্লকের ভিতরে লাল রঙ সনাক্ত করে। উল্লেখ্য যে প্রজেক্ট প্রবাহ একটি বস্তুর শনাক্ত হওয়ার পরবর্তী অবস্থার দিকে চলে যায় শুধুমাত্র যদি ডাউন আই সেন্সরটি লাল রঙ দেখতে না পায়। যদি ডাউন আই সেন্সরটি লাল শনাক্ত করে, প্রকল্প প্রবাহটি [যদি অন্যথায়] ব্লকটি এড়িয়ে যায় এবং বিপরীত দিকে এবং বাঁক নিয়ে গাড়ি চালানোর জন্য লাফ দেয়।
-
ডাউন আই সেন্সর একবার লাল রঙ শনাক্ত করলে, ভিআর রোবটটি উল্টো দিকে ড্রাইভ করবে, ঘুরবে, তারপর থামবে যেহেতু এটি প্রকল্প প্রবাহের শেষ। আচরণের পুনরাবৃত্তি করার জন্য কোন ব্লক ব্যবহার করা হয় না।

- একটি লুপে আচরণের পুনরাবৃত্তি করার জন্য একটি [চিরকাল] ব্লক প্রয়োজন। কোডে একটি [চিরকাল] ব্লক যোগ করুন।

-
এই প্রকল্পটি চালানো হলে, VR রোবট একটি শনাক্ত বিল্ডিংয়ের দিকে ড্রাইভ করবে এবং কোনো বিল্ডিং রিপোর্ট না হলে ডানদিকে ঘুরবে। ডাউন আই সেন্সর একবার লাল রঙ শনাক্ত করলে, ভিআর রোবটটি উল্টো দিকে ড্রাইভ করে, বাঁক নেয় এবং অন্য বিল্ডিংয়ের দিকে গাড়ি চালিয়ে যেতে থাকে।
