
Lição 3: Quando a cor vermelha é detectada
Não há comandos para dizer ao Robô VR o que fazer depois de detectar a cor vermelha. Para evitar a borda vermelha, o robô VR deve reverter e girar assim que detectar a cor vermelha.
- Adicione um bloco [Drive for] e [Turn for] ao final do código para permitir que o Robô VR inverta e gire assim que o Sensor Down Eye detectar a cor vermelha.

- Abra o Dynamic Castle Crasher Playground e execute o projeto.
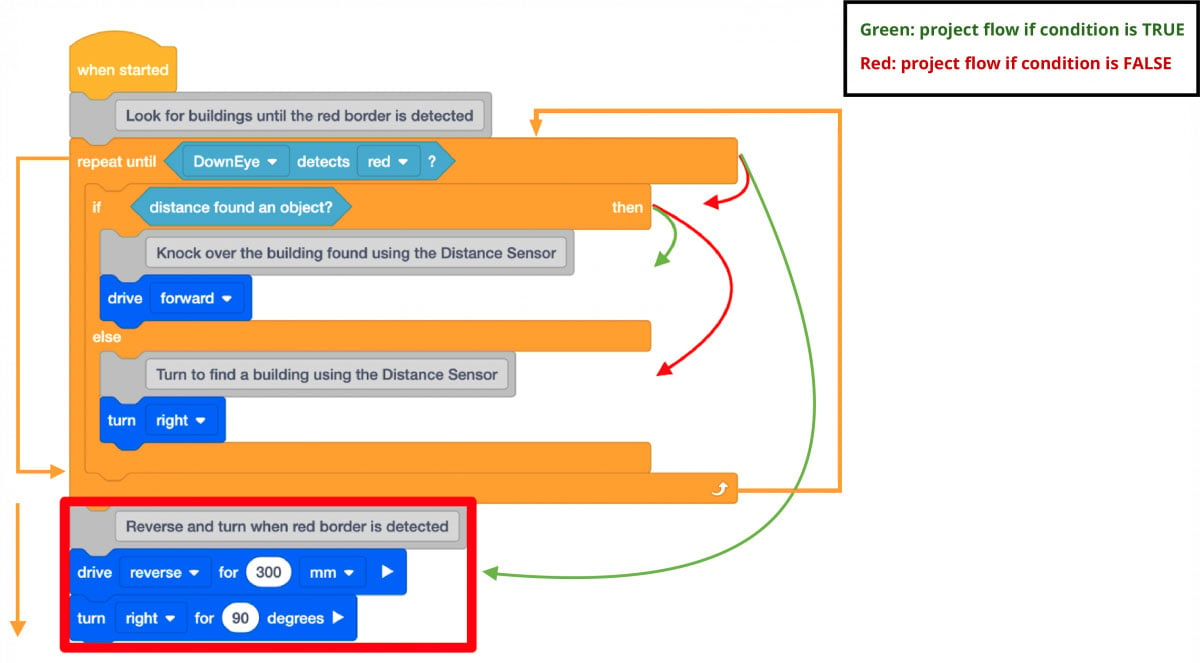
- Quando este projeto é executado, há duas condições que são verificadas. A primeira é a condição do Sensor de Olho para Baixo detectando a cor vermelha dentro do bloco [Repetir até]. Observe que o fluxo do projeto se move para a próxima condição de um objeto a ser detectado APENAS se o Sensor de Olho para Baixo não vir a cor vermelha. Se o sensor de olho para baixo detectar vermelho, o fluxo do projeto pula o bloco [If then else] e pula para dirigir em marcha à ré e girando.
-
Uma vez que o Sensor de Olho para Baixo detecta a cor vermelha, o Robô VR irá dirigir em sentido inverso, girar e parar, pois esse é o fim do fluxo do projeto. Não há nenhum bloco usado para repetir os comportamentos novamente.

- Um bloco [Forever] é necessário para que os comportamentos se repitam em loop. Adicione um bloco [Forever] ao código.

-
Quando este projeto for executado, o Robô VR irá dirigir em direção a um edifício detectado e virar à direita se nenhum edifício for relatado. Uma vez que o Sensor de Olho para Baixo detecta a cor vermelha, o Robô VR dirige em sentido inverso, vira e continua dirigindo em direção a outro prédio.

Perguntas
Selecione uma ligação abaixo para aceder ao questionário da aula.
Google Doc / .docx / .pdf