
Lezione 3: Quando viene rilevato il colore rosso
Non ci sono comandi per dire al Robot VR cosa fare una volta rilevato il colore rosso. Per evitare il bordo rosso, il robot VR dovrebbe invertire e girare una volta rilevato il colore rosso.
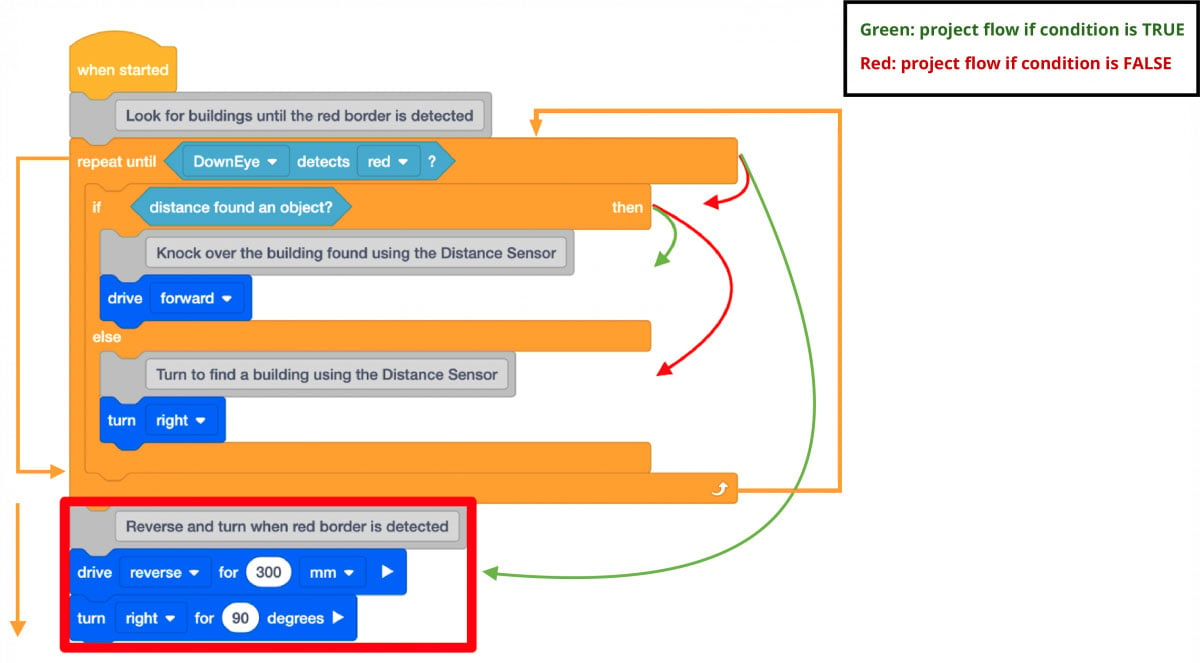
- Aggiungere un blocco [Drive for] e [Turn for] alla fine del codice per consentire al robot VR di invertire e ruotare una volta che il sensore Down Eye rileva il colore rosso.

- Apri il parco giochi Dynamic Castle Crasher e gestisci il progetto.
- Quando questo progetto viene eseguito, ci sono due condizioni che vengono controllate. La prima è la condizione del Down Eye Sensor che rileva il colore rosso all'interno del blocco [Repeat until]. Si noti che il flusso del progetto passa alla condizione successiva di un oggetto rilevato SOLO se il sensore Down Eye non vede il colore rosso. Se il sensore Down Eye rileva il rosso, il flusso del progetto salta il blocco [If then else] e passa alla guida in retromarcia e alla svolta.
-
Una volta che il sensore Down Eye rileva il colore rosso, il robot VR si muoverà in retromarcia, girerà, quindi si fermerà poiché questa è la fine del flusso del progetto. Non viene utilizzato alcun blocco per ripetere nuovamente i comportamenti.

- È necessario un blocco [Forever] affinché i comportamenti si ripetano in un ciclo. Aggiungi un blocco [Forever] al codice.

-
Quando questo progetto viene eseguito, il robot VR si dirigerà verso un edificio rilevato e girerà a destra se non vengono segnalati edifici. Una volta che il sensore Down Eye rileva il colore rosso, il robot VR si muove in retromarcia, gira e continua a guidare verso un altro edificio.
