
الدرس 2: القيادة للمسافة - التحرك للأمام والخلف
في هذا الدرس، سوف تقوم بإنشاء مشروع VEXcode VR يستخدم أوامر Drivetrain للأمام والخلف لإسقاط القلعة الأولى في Castle Crasher Playground!
مخرجات التعلم
- حدد كيفية استخدام كتلة [Drive for] لقيادة روبوت الواقع الافتراضي لمسافة محددة.
- حدد كيفية تغيير المعلمة في كتلة [Drive for] لتحريك روبوت الواقع الافتراضي للأمام والخلف.
- حدد كيفية استخدام كتلة [ضبط سرعة القيادة] لضبط سرعة مجموعة القيادة.
- حدد نطاق القيم المستخدمة في كتلة [ضبط سرعة القيادة].
إنشاء مشروع جديد
يجب إنشاء مشروع VEXcode VR حتى يتمكن روبوت الواقع الافتراضي من التحرك للأمام من أجل الاصطدام بالقلعة الأولى في Castle Crasher Playground، ثم القيادة في الاتجاه المعاكس للعودة إلى نقطة البداية
اتبع هذه الخطوات لإنشاء مشروع VEXcode VR جديد.
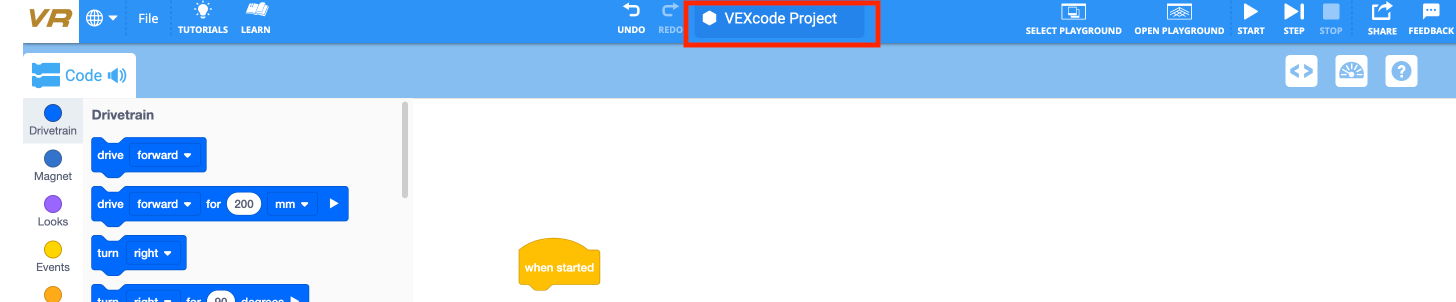
- قم بتشغيل VEXcode VR على vr.vex.com.
- افتح قائمة الملف واختر "مشروع كتل جديدة".
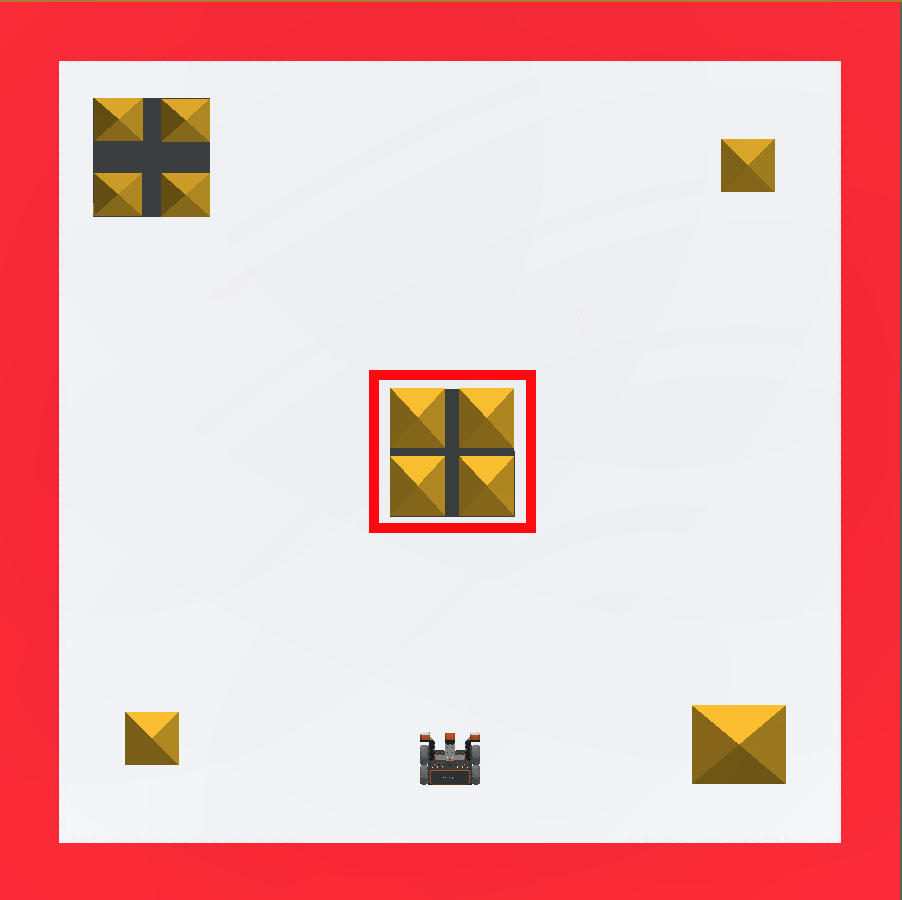
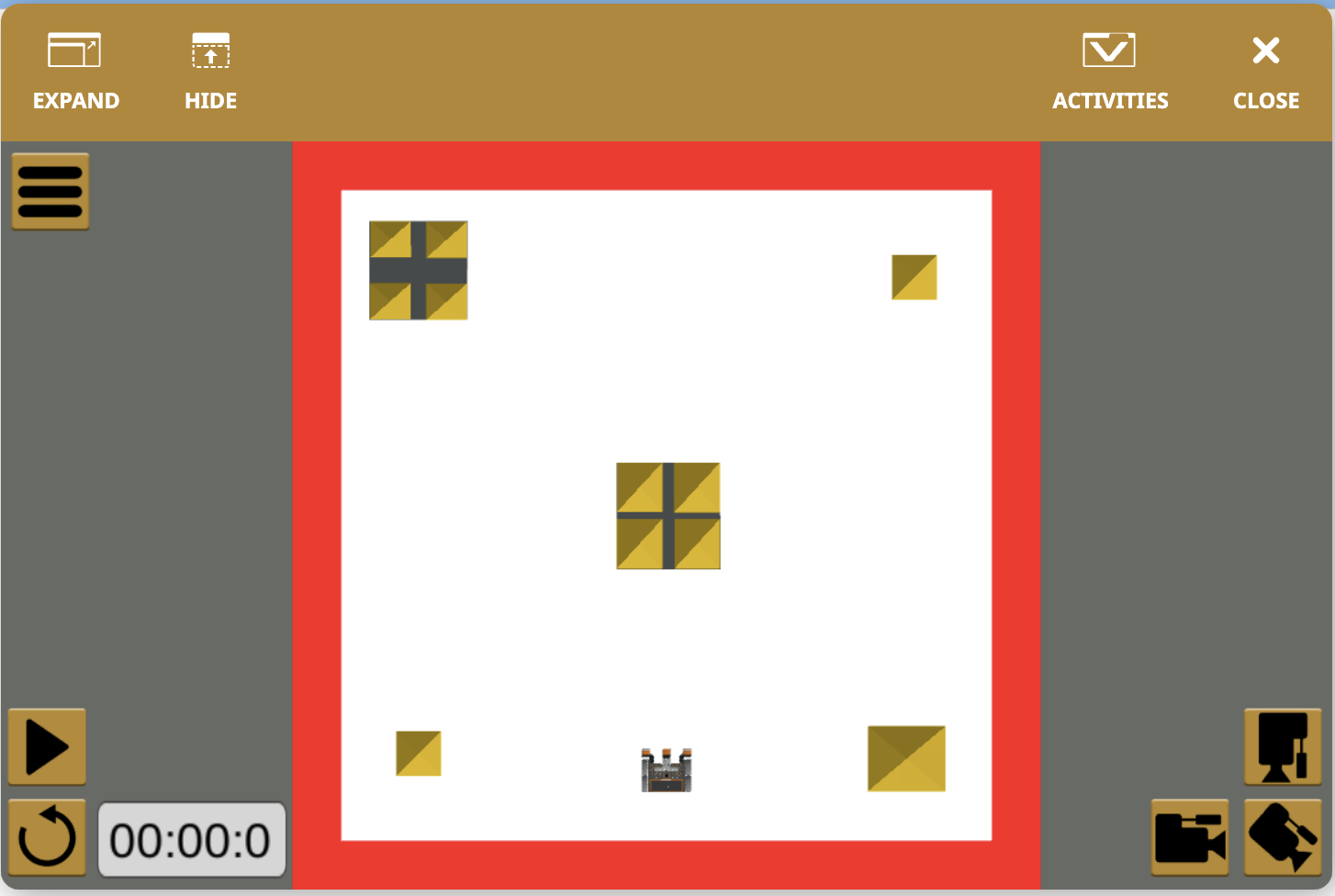
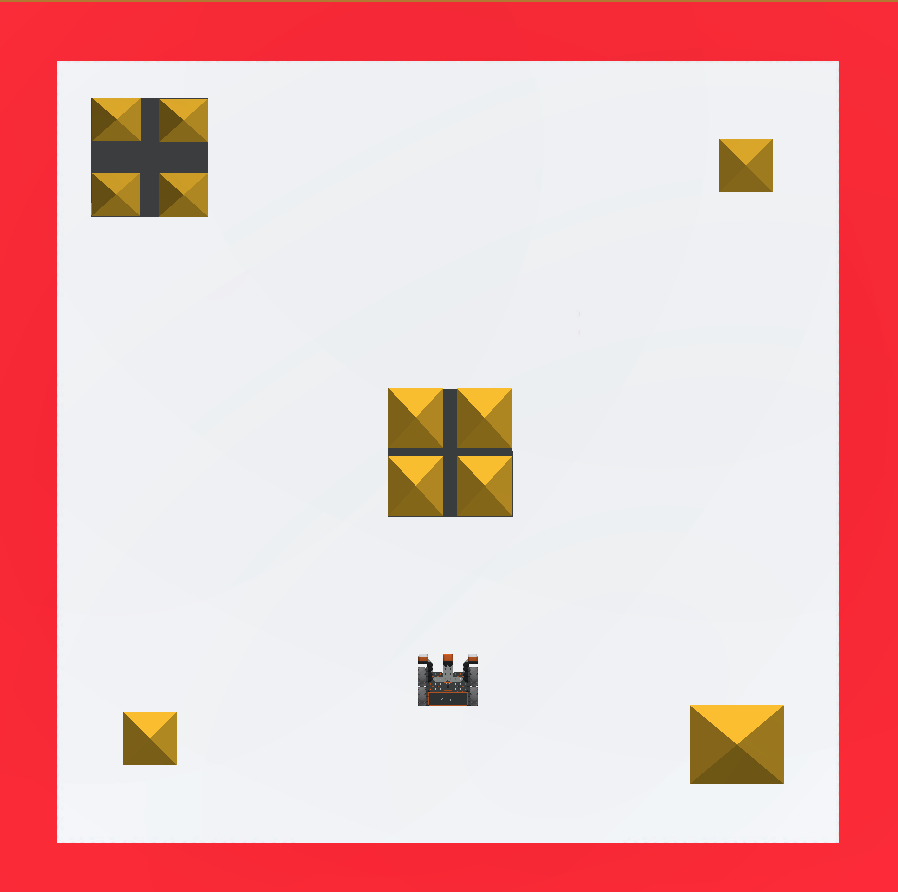
- سيُطلب منك تحديد ملعب. حدد ملعب Castle Crasher.

- سيتم فتح الملعب في مساحة العمل.

اسم مشروعك
-
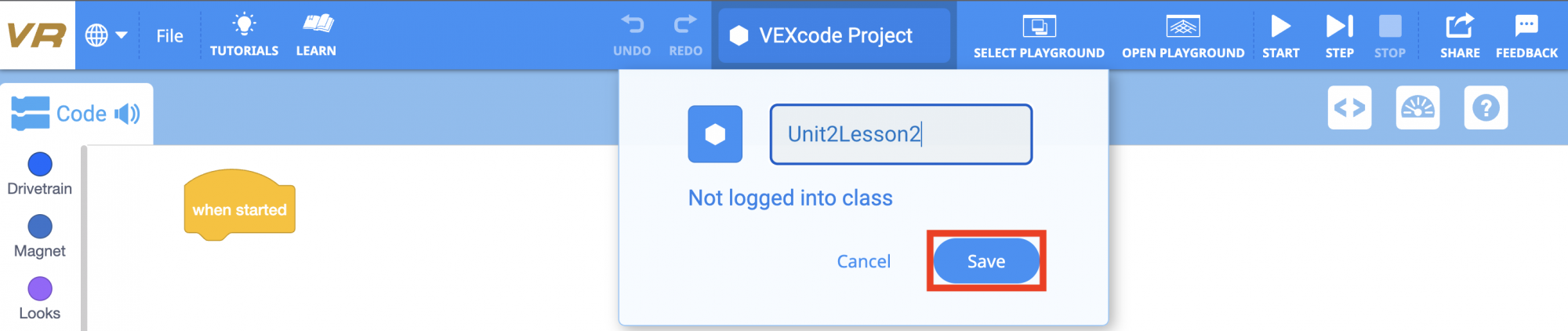
لتسمية مشروعك، حدد مربع اسم المشروع.
-
أدخل اسم المشروع الجديد Unit2Lesson2، وحدد "حفظ".

القيادة للأمام والخلف
استخدم بلوكة [القيادة من أجل] لبرمجة روبوت VR للتحرك للأمام لضرب القلعة الأولى على قلعة كسر Playground.
-
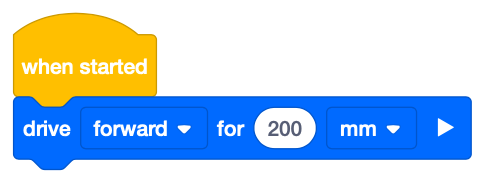
اسحب كتلة [Drive for] إلى مساحة العمل وضعها تحت كتلة [When started].
-
قم بتحديد زر "فتح الملعب" لتشغيل Castle Crasher الملعب إذا لم يكن مفتوحًا بالفعل.

-
تأكد من أن ساحة اللعب Castle Crasher مفتوحة.
-
إذا تم فتح ساحة لعب مختلفة، قم بالتبديل إلى ساحة اللعب Castle Crasher. لتغيير الملاعب، حدد زر تحديد ملعب.

- حدد Castle Crasher في قائمة Select Playground.
-
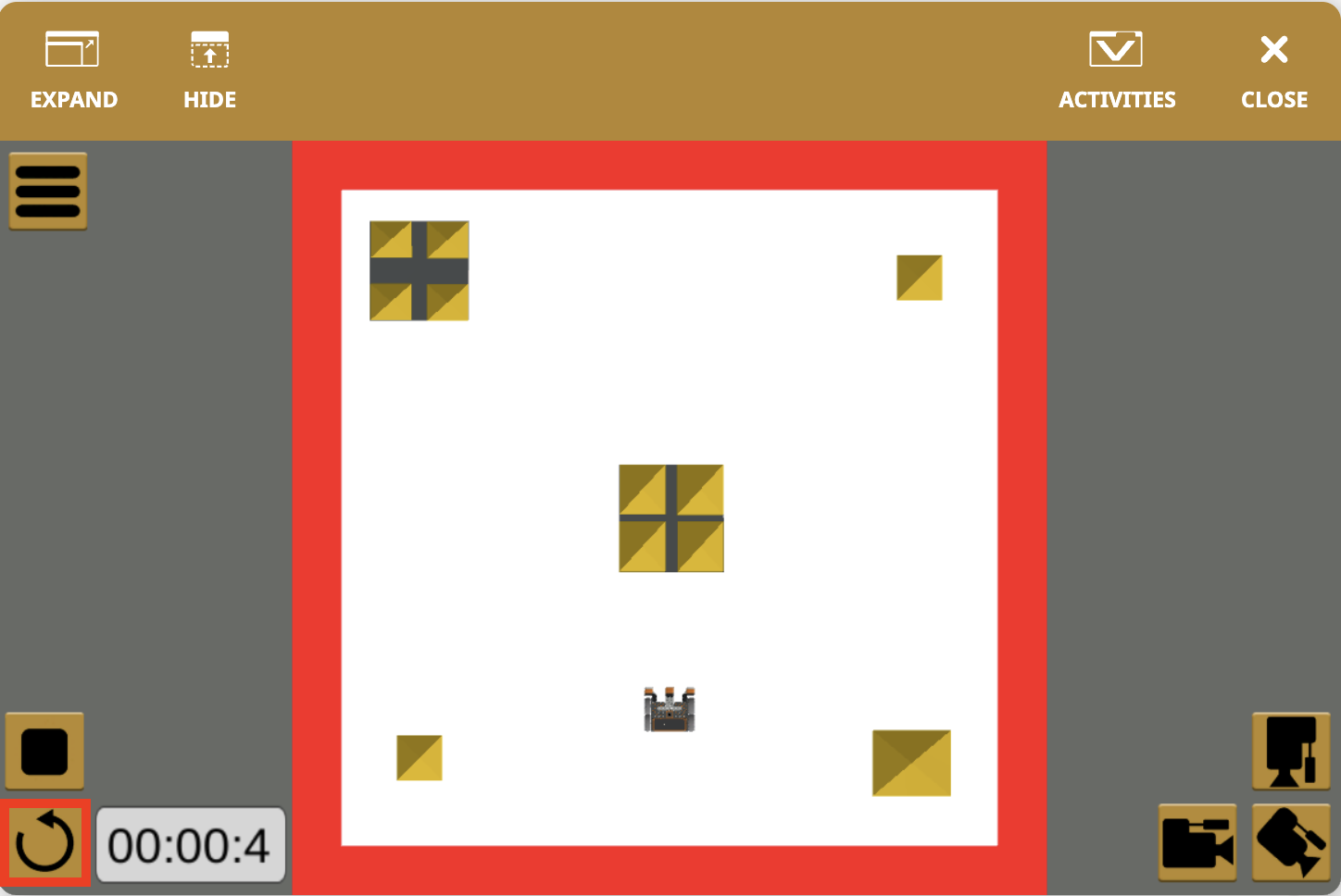
حدد زر "ابدأ" لاختبار المشروع.

-
سوف يتحرك روبوت الواقع الافتراضي للأمام لمسافة 200 ملم على ساحة اللعب Castle Crasher. لاحظ أن روبوت الواقع الافتراضي لم يلمس القلعة المركزية. يجب تعديل المعلمات في كتلة [Drive for] حتى يتمكن روبوت الواقع الافتراضي من القيادة أكثر.
-
حدد الزر "إعادة الضبط" لإعادة ضبط الملعب وحرك روبوت الواقع الافتراضي مرة أخرى إلى وضع البداية.
استخدام كتل المفاتيح
حتى الآن، تعرفت على كتلة [Drive for].

تعرض الصورة أدناه كتلة Switch [Drive for] التي تتضمن الأمر إلى Drive forward لـ 200 مم في Python. إذا كنت ترغب في استخدام كتل التبديل، فما عليك سوى النقر على كتلة VEXcode [Drive for] وحدد "تحويل الكتلة إلى كتلة تبديل" أو اسحب كتلة مجموعة نقل الحركة Switch إلى مساحة العمل واكتب أمر Python داخل الكتلة.

قم بتحديد زر التالي للمتابعة مع بقية هذا الدرس.