
പാഠം 2: ദൂരത്തേക്ക് ഡ്രൈവിംഗ് - മുന്നോട്ടും പിന്നോട്ടും നീങ്ങുന്നു
ഈ പാഠത്തിൽ, കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട്ലെ ആദ്യത്തെ കോട്ടയെ തകർക്കാൻ ഫോർവേഡ്, റിവേഴ്സ് ഡ്രൈവ്ട്രെയിൻ കമാൻഡുകൾ ഉപയോഗിക്കുന്ന ഒരു VEXcode VR പ്രോജക്റ്റ് നിങ്ങൾ സൃഷ്ടിക്കും!
പഠന ഫലങ്ങൾ
- VR റോബോട്ടിനെ ഒരു നിശ്ചിത ദൂരം ഓടിക്കുന്നതിന് [ഡ്രൈവ് ഫോർ] ബ്ലോക്ക് എങ്ങനെ ഉപയോഗിക്കാമെന്ന് തിരിച്ചറിയുക.
- VR റോബോട്ടിനെ മുന്നോട്ടും പിന്നോട്ടും നീക്കുന്നതിന് [Drive for] ബ്ലോക്കിലെ പാരാമീറ്റർ എങ്ങനെ മാറ്റാമെന്ന് തിരിച്ചറിയുക.
- ഡ്രൈവ്ട്രെയിനിന്റെ വേഗത സജ്ജമാക്കാൻ [ഡ്രൈവ് പ്രവേഗം സജ്ജമാക്കുക] ബ്ലോക്ക് എങ്ങനെ ഉപയോഗിക്കാമെന്ന് തിരിച്ചറിയുക.
- [ഡ്രൈവ് പ്രവേഗം സജ്ജമാക്കുക] ബ്ലോക്കിൽ ഉപയോഗിക്കുന്ന മൂല്യങ്ങളുടെ ശ്രേണി തിരിച്ചറിയുക.
ഒരു പുതിയ പ്രോജക്റ്റ് സൃഷ്ടിക്കുക
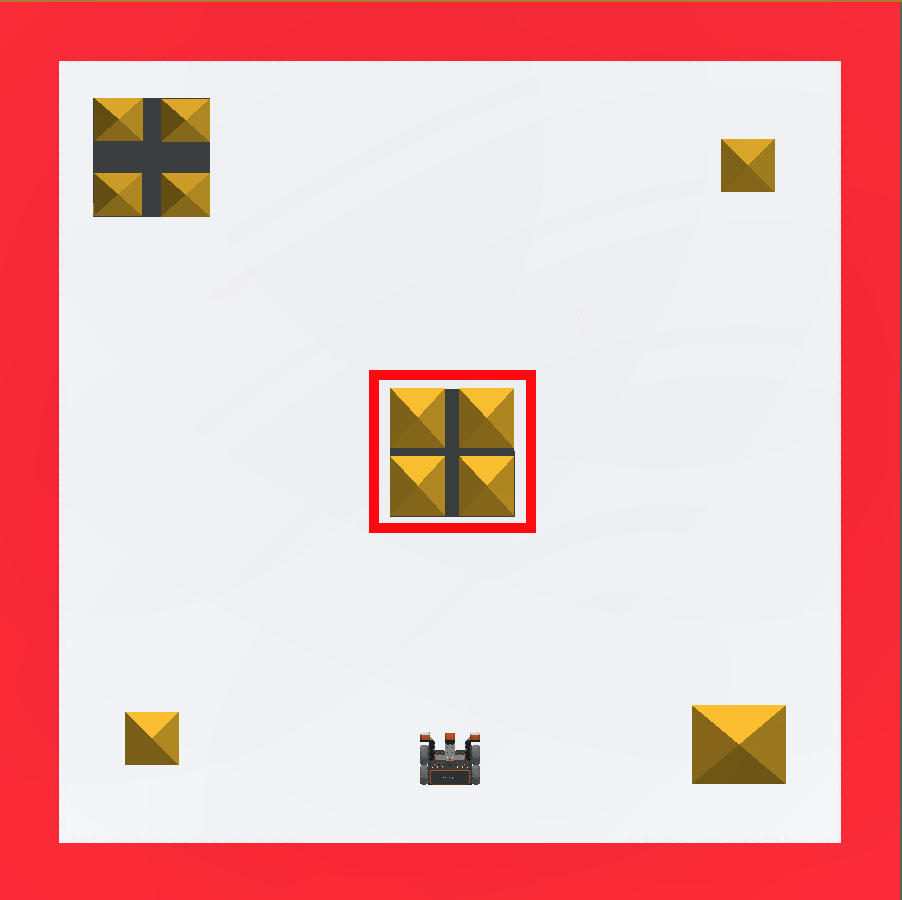
കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട്ലെ ആദ്യത്തെ കാസിലുമായി കൂട്ടിയിടിക്കുന്നതിന് ഒരു VR റോബോട്ട് മുന്നോട്ട് പോകുന്നതിന് ഒരു VEXcode VR പ്രോജക്റ്റ് സൃഷ്ടിക്കേണ്ടതുണ്ട്, തുടർന്ന് ആരംഭ സ്ഥാനത്തേക്ക് മടങ്ങുന്നതിന് റിവേഴ്സ് ഡ്രൈവ് ചെയ്യുക.
ഒരു പുതിയ VEXcode VR പ്രോജക്റ്റ് സൃഷ്ടിക്കാൻ ഈ ഘട്ടങ്ങൾ പാലിക്കുക.
- vr.vex.com-ൽ VEXcode VR സമാരംഭിക്കുക.
- ഫയൽ മെനു തുറന്ന് 'ന്യൂ ബ്ലോക്ക്സ് പ്രോജക്റ്റ്' തിരഞ്ഞെടുക്കുക.
- ഒരു കളിസ്ഥലം തിരഞ്ഞെടുക്കാൻ നിങ്ങളോട് ആവശ്യപ്പെടും. കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട്തിരഞ്ഞെടുക്കുക.

- വർക്ക്സ്പെയ്സിൽ കളിസ്ഥലം തുറക്കും.

നിങ്ങളുടെ പ്രോജക്റ്റിന് പേര് നൽകുക
-
നിങ്ങളുടെ പ്രോജക്റ്റിന് പേരിടാൻ, പ്രോജക്റ്റ് നെയിം ബോക്സ് തിരഞ്ഞെടുക്കുക.
-
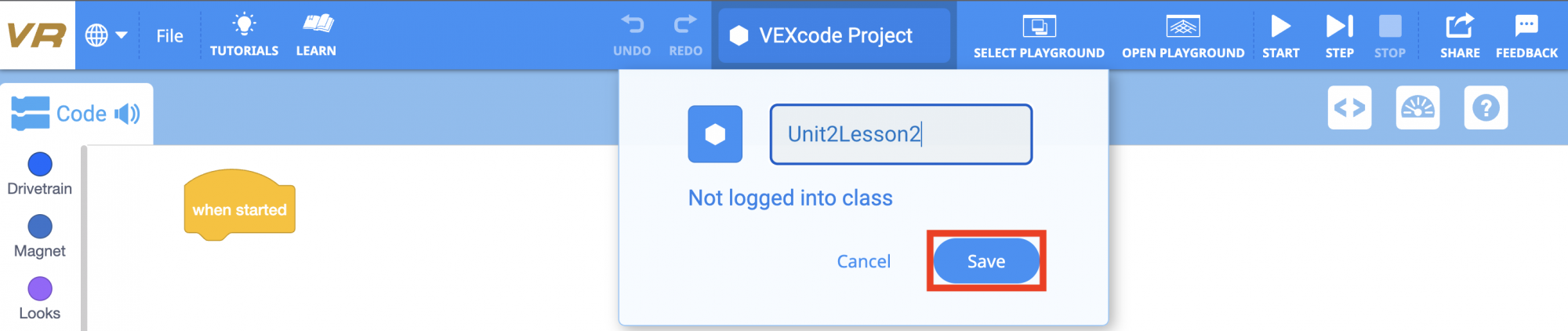
പുതിയ പ്രോജക്റ്റ് നാമം Unit2Lesson2നൽകി, “സേവ്” തിരഞ്ഞെടുക്കുക.

മുന്നോട്ടും പിന്നോട്ടും ഡ്രൈവ് ചെയ്യുക
കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട്ലെ ആദ്യത്തെ കോട്ടയെ തകർക്കാൻ മുന്നോട്ട് പോകാൻ ഒരു VR റോബോട്ട് പ്രോഗ്രാം ചെയ്യാൻ [ഡ്രൈവ് ഫോർ] ബ്ലോക്ക് ഉപയോഗിക്കുക.
-
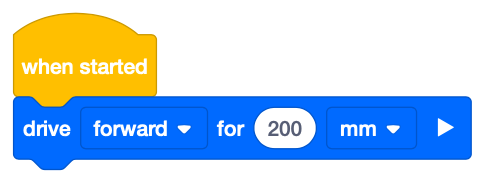
[Drive for] ബ്ലോക്ക് വർക്ക്സ്പെയ്സിലേക്ക് വലിച്ചിട്ട് [When started] ബ്ലോക്കിന് കീഴിൽ വയ്ക്കുക.
-
കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട് ഇതിനകം തുറന്നിട്ടില്ലെങ്കിൽ അത് സമാരംഭിക്കുന്നതിന് "ഓപ്പൺ പ്ലേഗ്രൗണ്ട്" ബട്ടൺ തിരഞ്ഞെടുക്കുക.

-
കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട് തുറന്നിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
-
മറ്റൊരു കളിസ്ഥലം തുറക്കുകയാണെങ്കിൽ, കാസിൽ ക്രാഷർ കളിസ്ഥലംലേക്ക് മാറ്റുക. കളിസ്ഥലങ്ങൾ മാറ്റാൻ, കളിസ്ഥലം തിരഞ്ഞെടുക്കുക ബട്ടൺ തിരഞ്ഞെടുക്കുക.

- സെലക്ട് പ്ലേഗ്രൗണ്ട് മെനുവിൽ കാസിൽ ക്രാഷർ തിരഞ്ഞെടുക്കുക.
-
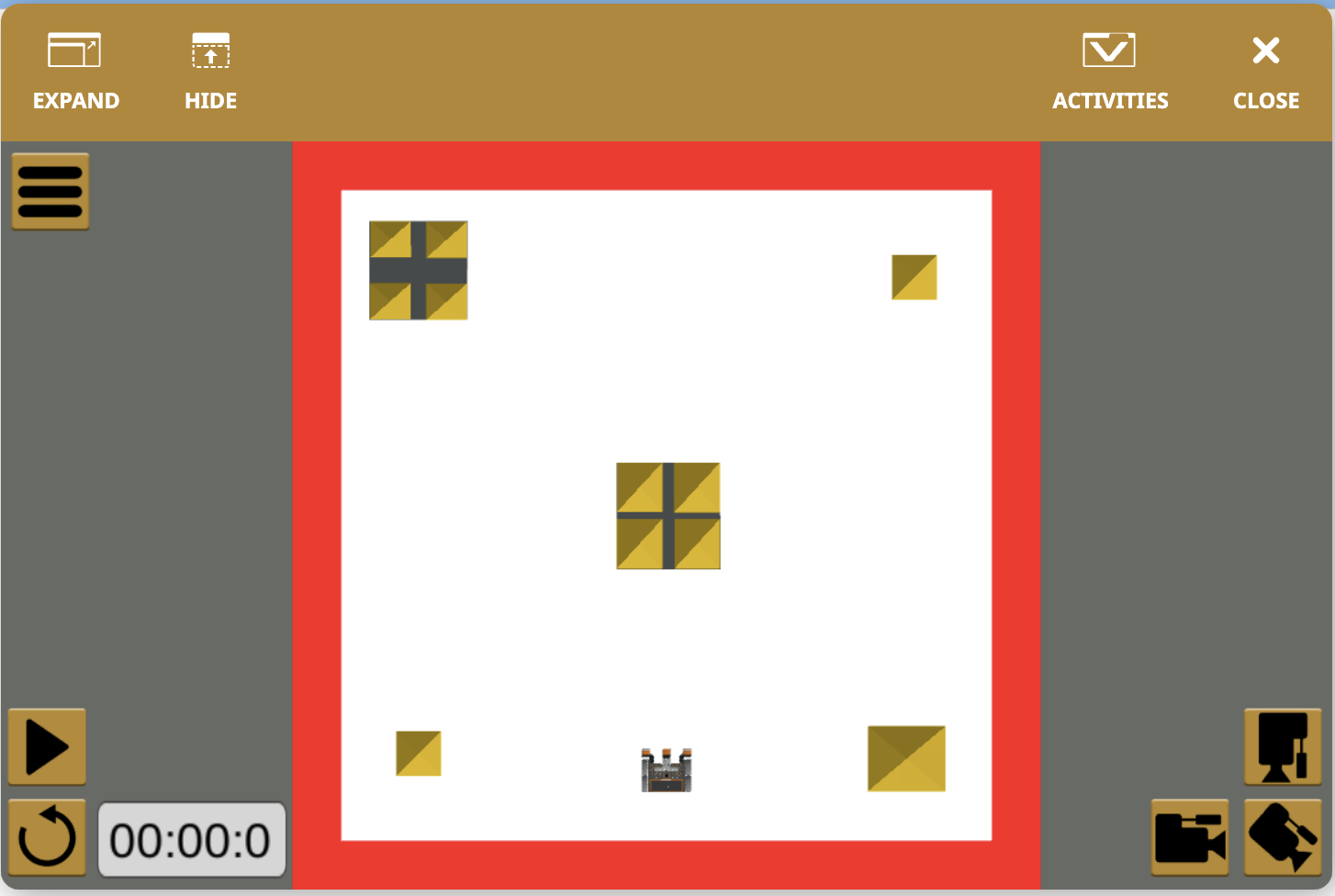
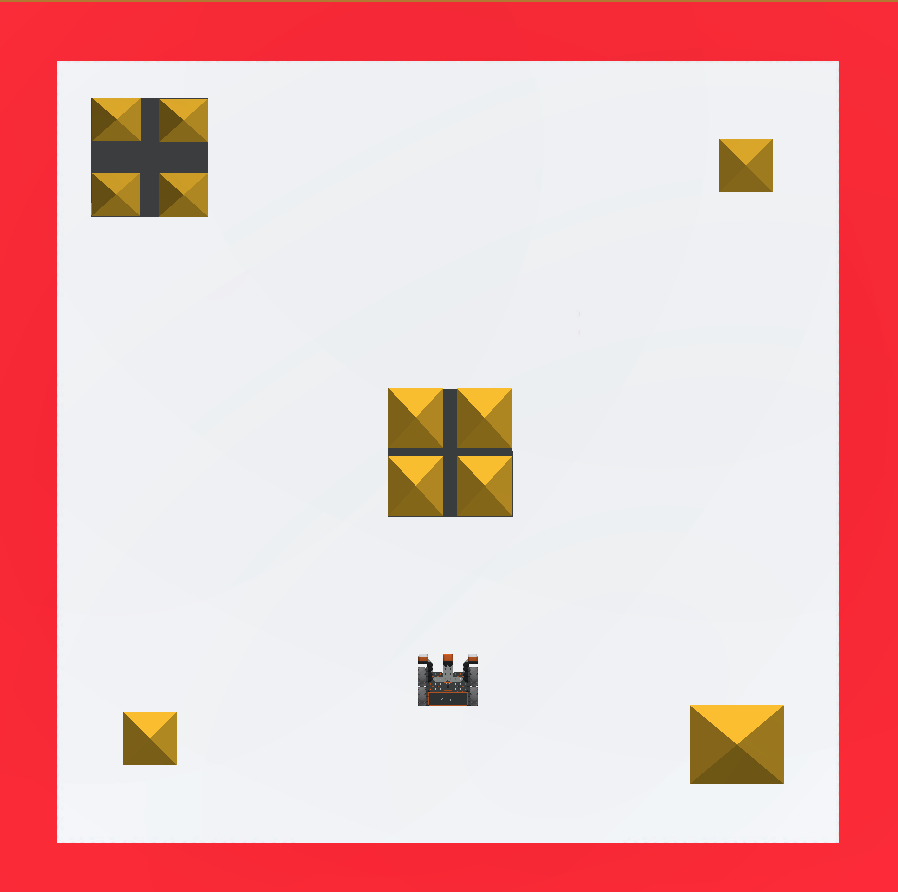
പ്രോജക്റ്റ് പരീക്ഷിക്കാൻ "ആരംഭിക്കുക" ബട്ടൺ തിരഞ്ഞെടുക്കുക.

-
കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട്ൽ വിആർ റോബോട്ട് 200 മില്ലിമീറ്ററോളം മുന്നോട്ട് ഓടും. വിആർ റോബോട്ട് മധ്യഭാഗത്തെ കോട്ടയിൽ തൊട്ടിട്ടില്ല എന്നത് ശ്രദ്ധിക്കുക. VR റോബോട്ടിന് കൂടുതൽ ദൂരം സഞ്ചരിക്കാൻ കഴിയുന്ന തരത്തിൽ [Drive for] ബ്ലോക്കിലെ പാരാമീറ്ററുകൾ ക്രമീകരിക്കേണ്ടതുണ്ട്.
-
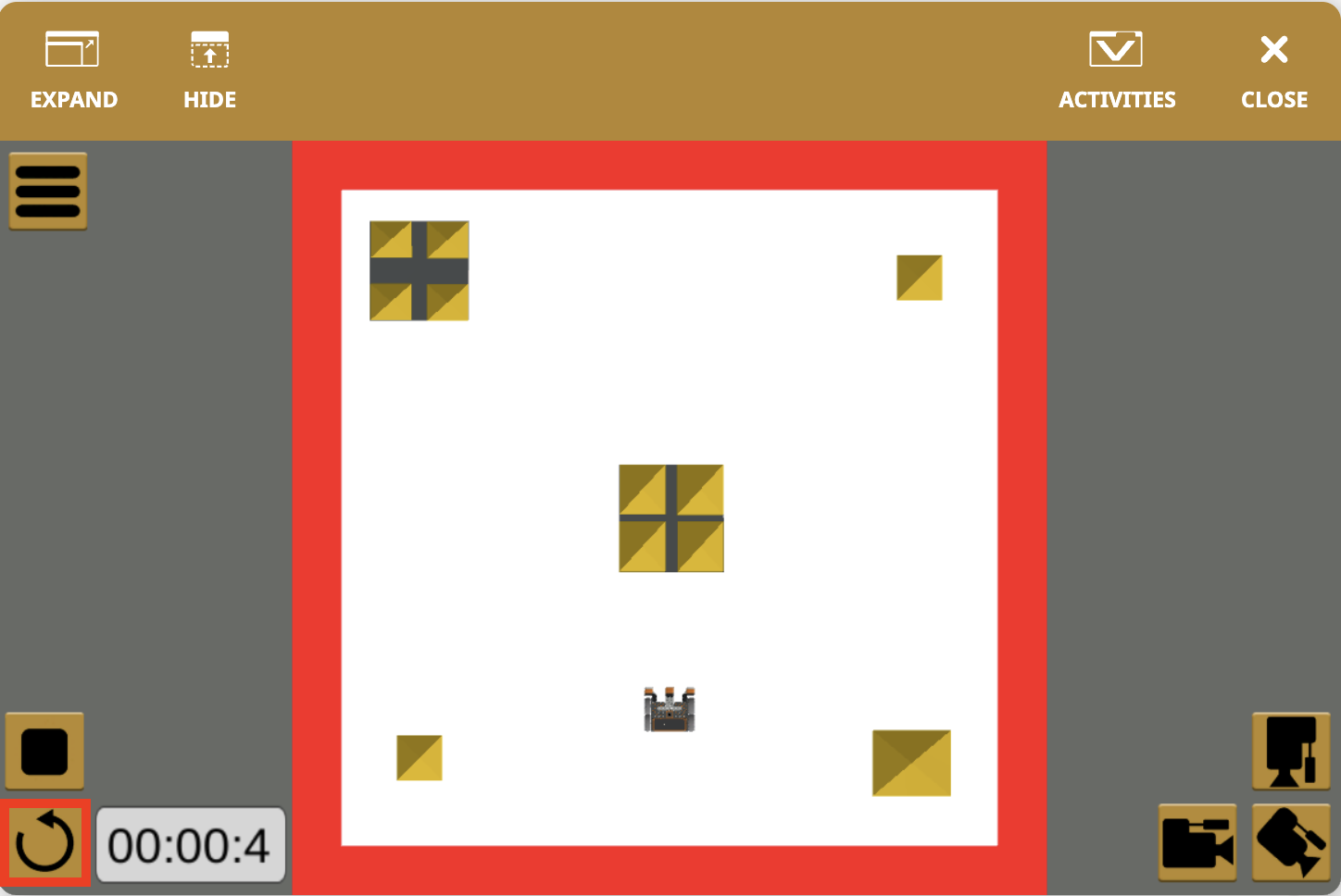
പ്ലേഗ്രൗണ്ട് പുനഃസജ്ജമാക്കാൻ "റീസെറ്റ്" ബട്ടൺ തിരഞ്ഞെടുത്ത് VR റോബോട്ടിനെ ആരംഭ സ്ഥാനത്തേക്ക് തിരികെ നീക്കുക.
സ്വിച്ച് ബ്ലോക്കുകൾ ഉപയോഗിക്കുന്നു
ഇതുവരെ, നിങ്ങൾ [Drive for] ബ്ലോക്കിനെക്കുറിച്ച് പഠിച്ചു.

താഴെയുള്ള ചിത്രം പൈത്തണിൽ 200 mm ഫോർവേഡ് ഡ്രൈവ് ചെയ്യാനുള്ള കമാൻഡ് ഉൾപ്പെടുന്ന സ്വിച്ച് [ഡ്രൈവ് ഫോർ] ബ്ലോക്ക് പ്രദർശിപ്പിക്കുന്നു. നിങ്ങൾക്ക് സ്വിച്ച് ബ്ലോക്കുകൾ ഉപയോഗിക്കാൻ താൽപ്പര്യമുണ്ടെങ്കിൽ, VEXcode [Drive for] ബ്ലോക്കിൽ ക്ലിക്ക് ചെയ്ത് "Convert Block to Switch Block" തിരഞ്ഞെടുക്കുക അല്ലെങ്കിൽ ഒരു സ്വിച്ച് ഡ്രൈവ്ട്രെയിൻ ബ്ലോക്ക് വർക്ക്സ്പെയ്സിലേക്ക് ഡ്രാഗ് ചെയ്ത് ബ്ലോക്കിനുള്ളിൽ പൈത്തൺ കമാൻഡ് ടൈപ്പ് ചെയ്യുക.

ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.