
บทเรียนที่ 2: การขับรถในระยะทาง - การเคลื่อนที่ไปข้างหน้าและในทางกลับกัน
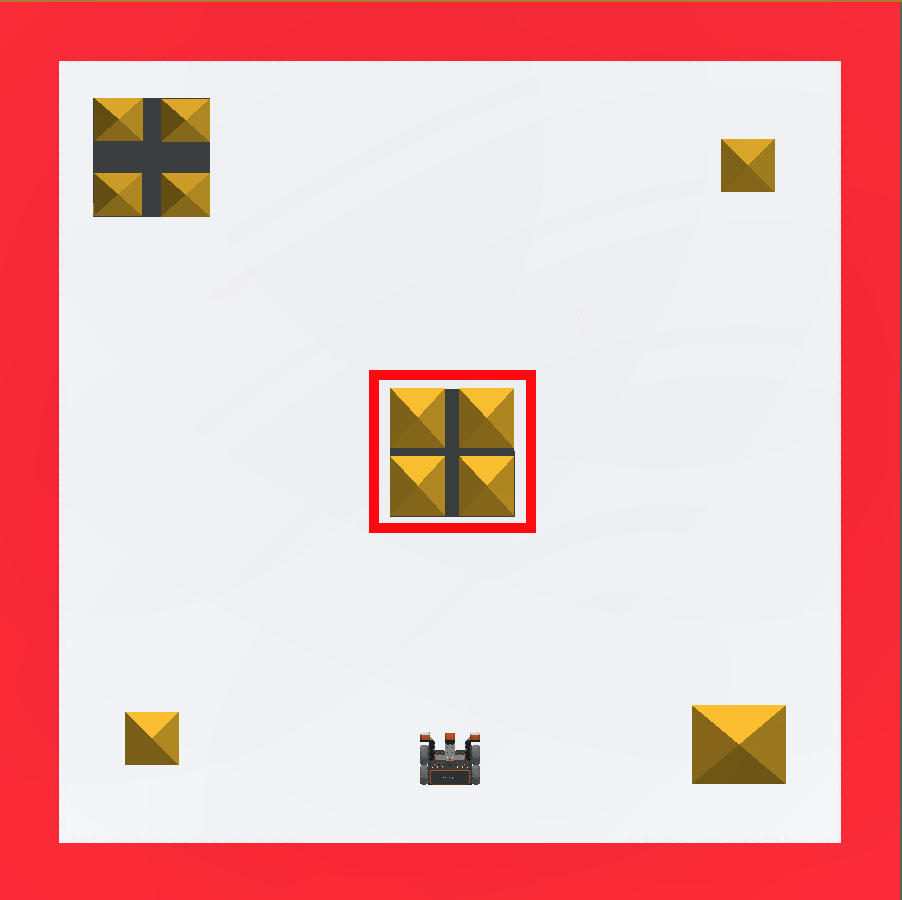
ในบทเรียนนี้ คุณจะสร้างโปรเจ็กต์ VEXcode VR ที่ใช้คำสั่ง Drivetrain เดินหน้าและถอยหลังเพื่อทำลายปราสาทแรกใน Castle Crasher Playground!
ผลการเรียนรู้
- ระบุวิธีการใช้บล็อก [Drive for] เพื่อขับเคลื่อนหุ่นยนต์ VR ในระยะทางที่กำหนด
- ระบุวิธีการเปลี่ยนพารามิเตอร์ในบล็อก [Drive for] เพื่อเลื่อนหุ่นยนต์ VR ไปข้างหน้าและย้อนกลับ
- ระบุวิธีการใช้บล็อก [ตั้งค่าความเร็วไดรฟ์] เพื่อตั้งค่าความเร็วของระบบขับเคลื่อน
- ระบุช่วงของค่าที่ใช้ในบล็อก [ตั้งค่าความเร็วไดรฟ์]
สร้างโปรเจกต์ใหม่
จะต้องสร้างโครงการ VEXcode VR เพื่อให้หุ่นยนต์ VR เคลื่อนที่ไปข้างหน้าเพื่อชนกับปราสาทแรกใน Castle Crasher Playgroundจากนั้นขับถอยหลังเพื่อกลับสู่ตำแหน่งเริ่มต้น
ทำตามขั้นตอนเหล่านี้เพื่อสร้างโครงการ VEXcode VR ใหม่
- เปิด VEXcode VR ที่vr.vex.com
- เปิดเมนูไฟล์และเลือก 'New Blocks Project'
- คุณจะได้รับแจ้งให้เลือกสนามเด็กเล่น เลือกสนาม เด็กเล่น CastleCrasher

- สนามเด็กเล่นจะเปิดในพื้นที่ทำงาน

ตั้งชื่อโปรเจกต์ของ
-
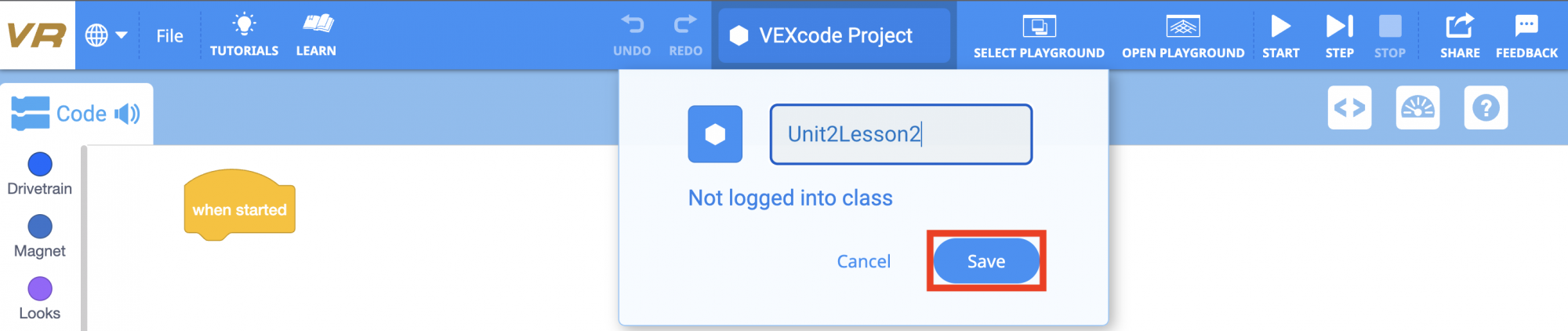
หากต้องการตั้งชื่อโปรเจกต์ให้เลือกช่องชื่อโปรเจกต์

-
ป้อนชื่อโปรเจ กต์ใหม่Unit2Lesson2 และเลือก "บันทึก"

ขับไปข้างหน้าและในทางกลับกัน
ใช้บล็อก [ขับรถเพื่อ] เพื่อตั้งโปรแกรมหุ่นยนต์ VR ให้เคลื่อนที่ไปข้างหน้าเพื่อล้มปราสาทแรกใน Castle Crasher Playground
-
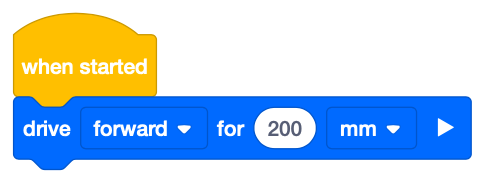
ลากบล็อค [Drive for] ลงในพื้นที่ทำงานและวางไว้ใต้บล็อค [When started]
-
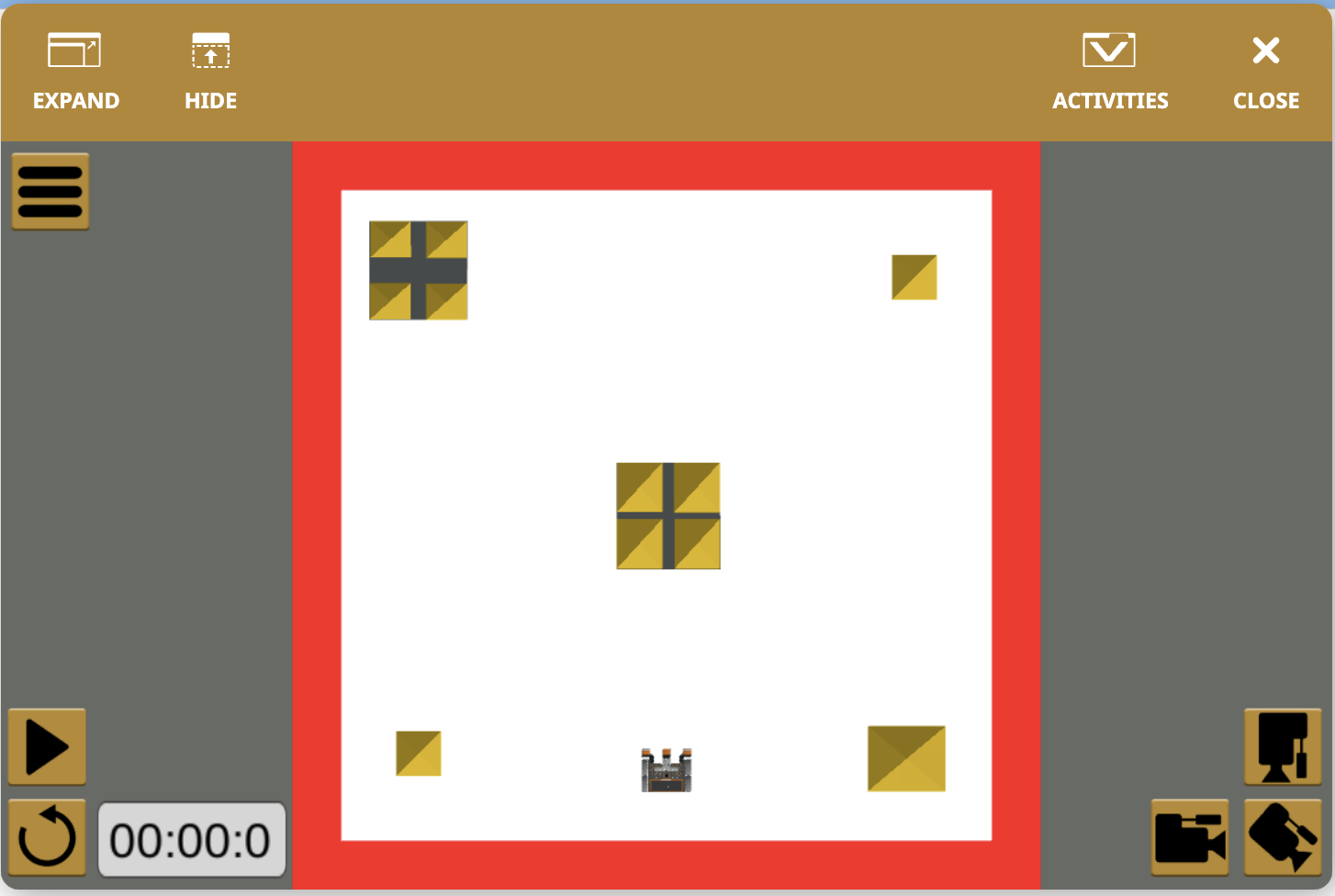
เลือกปุ่ม “เปิดสนามเด็กเล่น” เพื่อเปิด Castle Crasher Playground หากยังไม่ได้เปิดอยู่

-
ตรวจสอบให้แน่ใจว่า Castle Crasher Playground เปิดอยู่
-
หากมีการเปิดสนามเด็กเล่นอื่น ให้เปลี่ยนเป็น Castle Crasher Playground หากต้องการเปลี่ยนสนามเด็กเล่นให้เลือกปุ่มเลือกสนามเด็กเล่น

- เลือก Castle Crasher ในเมนูเลือกสนามเด็กเล่น
-
เลือกปุ่ม "เริ่ม" เพื่อทดสอบโปรเจกต์

-
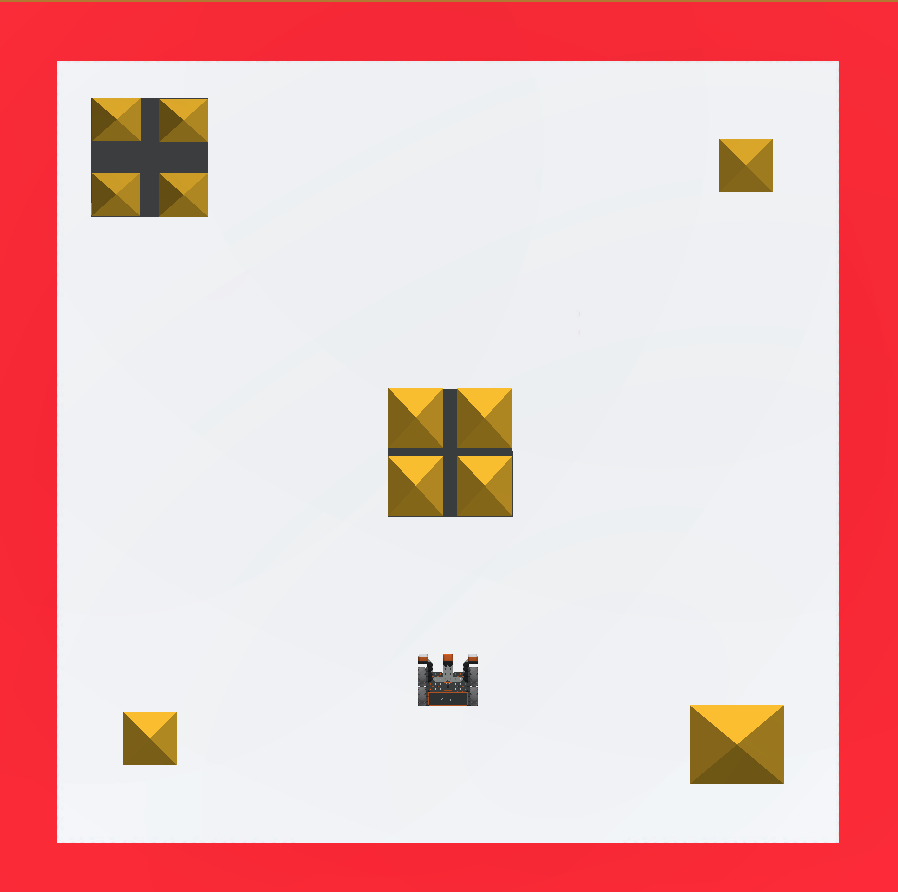
หุ่นยนต์ VR จะขับเคลื่อนไปข้างหน้าเป็นระยะทาง 200 มม. บน Castle Crasher Playground โปรดทราบว่าหุ่นยนต์ VR ไม่ได้แตะต้องปราสาทตรงกลาง ต้องปรับพารามิเตอร์ในบล็อก [Drive for] เพื่อให้หุ่นยนต์ VR สามารถขับเคลื่อนต่อไปได้
-
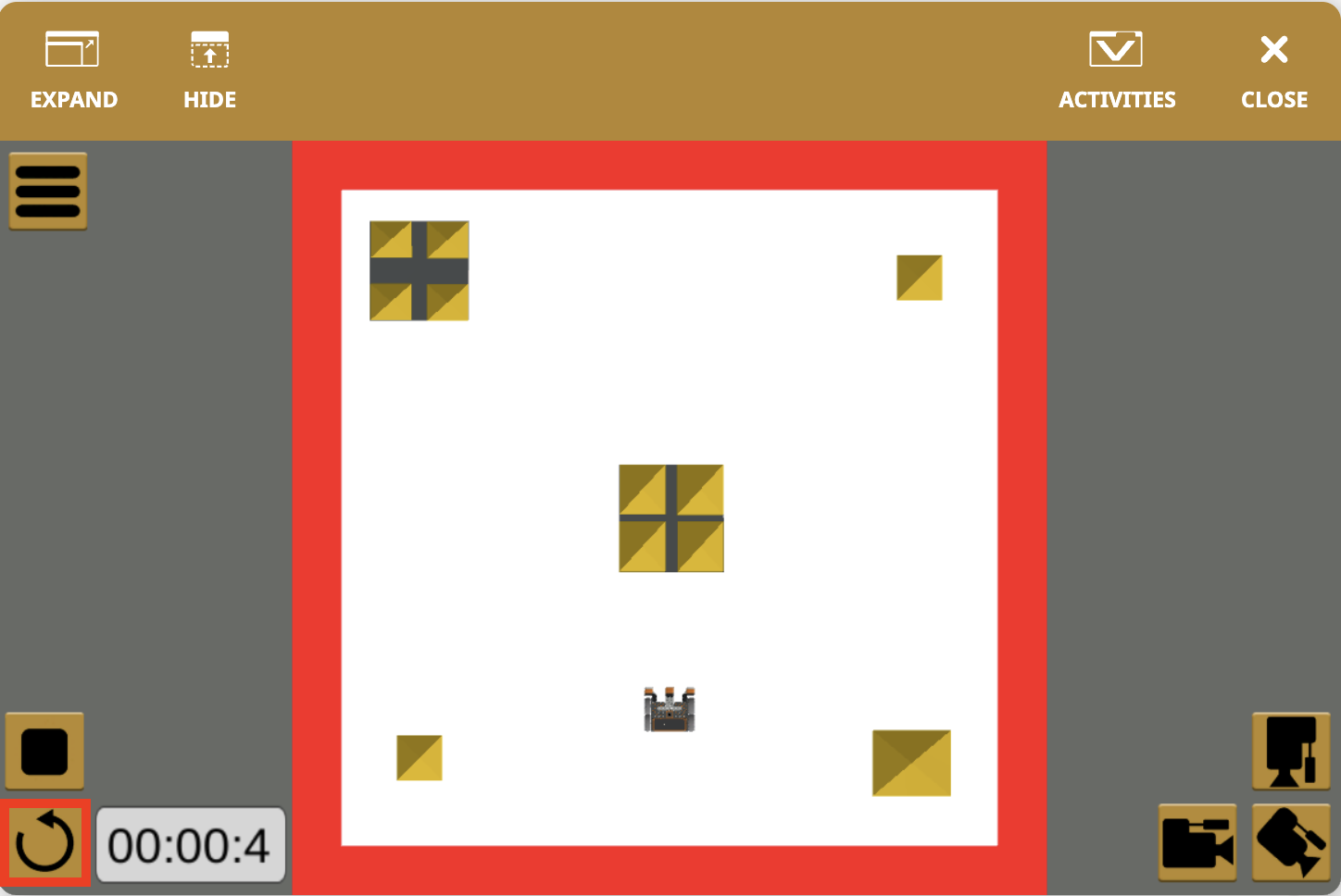
เลือกปุ่ม "รีเซ็ต" เพื่อรีเซ็ตสนามเด็กเล่นและย้ายหุ่นยนต์ VR กลับไปที่ตำแหน่งเริ่มต้น
การใช้สวิทช์บล็อก
จนถึงตอนนี้คุณได้เรียนรู้เกี่ยวกับบล็อก [Drive for] แล้ว

ภาพด้านล่างแสดงบล็อค Switch [Drive for] ที่มีคำสั่งให้ขับไปข้างหน้า 200 มม. ใน Python หากคุณต้องการใช้บล็อกสวิตช์เพียงคลิกที่บล็อก VEXcode [Drive for] และเลือก "แปลงบล็อกเป็นบล็อกสวิตช์" หรือลากบล็อกไดรฟ์เทรนสวิตช์ไปยังพื้นที่ทำงานและพิมพ์คำสั่ง Python ภายในบล็อก

เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป