
Lição 2: Dirigindo por Distância - Avançando e Indo para Trás
Nesta lição, você criará um projeto VEXcode VR que usa comandos de transmissão para frente e para trás para derrubar o primeiro castelo no Castle Crasher Playground!
Resultados de Aprendizagem
- Identifique como usar o bloco [Drive for] para conduzir o robô VR a uma distância específica.
- Identifique como alterar o parâmetro no bloco [Drive for] para mover o Robô VR para frente e para trás.
- Identifique como usar o bloco [Set drive velocity] para definir a velocidade do sistema de transmissão.
- Identifique o intervalo de valores usados no bloco [Set drive velocity].
Criar um Novo Projecto
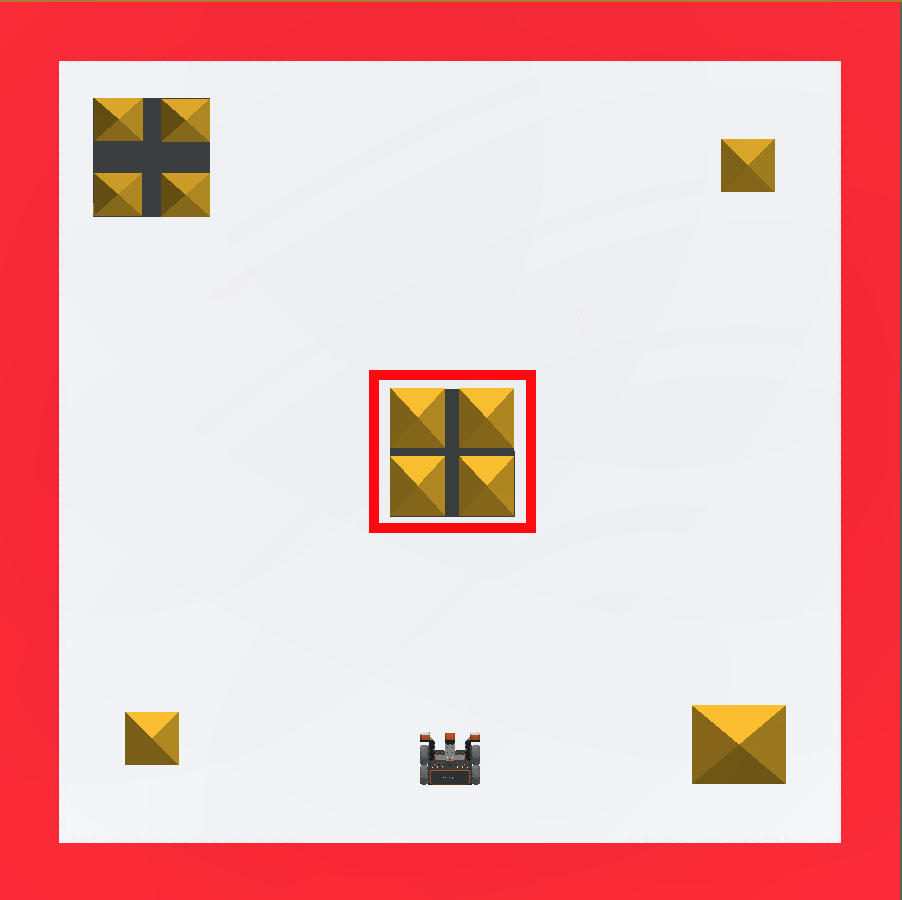
Um projeto VEXcode VR deve ser criado para que um robô VR avance para colidir com o primeiro castelo no Castle Crasher Playground e, em seguida, dirigir em sentido inverso para retornar à posição inicial.
Siga estas etapas para criar um novo projeto VEXcode VR.
- Inicie o VEXcode VR em vr.vex.com.
- Abra o Menu Ficheiro e selecione 'Novo Projeto de Blocos'.
- Ser-lhe-á pedido para selecionar um parque infantil. Escolha o Parque Infantil Castle Crasher.

- O Playground será aberto no Espaço de Trabalho.

Dê um nome ao seu projeto
-
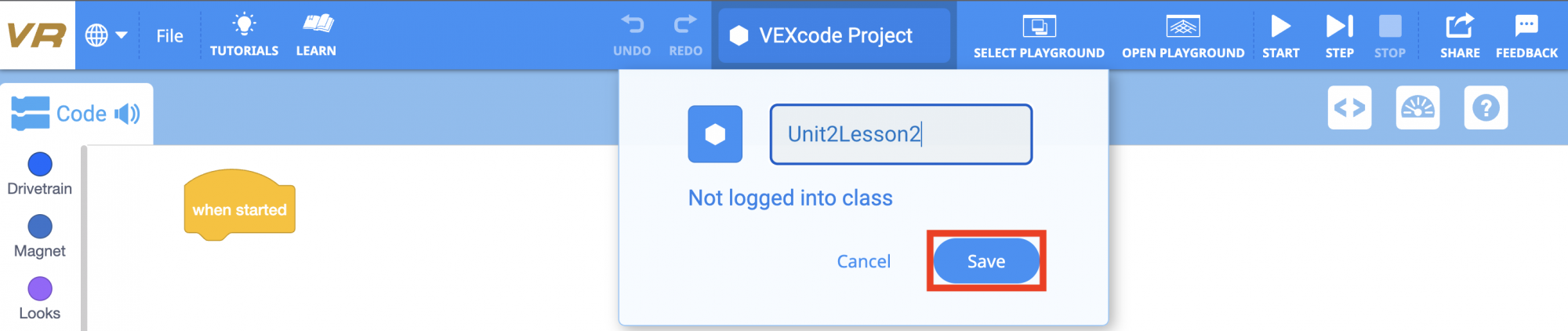
Para atribuir um nome ao seu projeto, selecione a caixa de nome do projeto.

-
Introduza o novo nome do projetoUnit2Lesson2 e selecione "Guardar".

Conduza para a frente e em marcha-atrás
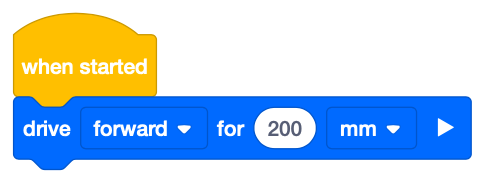
Use o bloco [Drive for] para programar um robô de RV para avançar e derrubar o primeiro castelo no Castle Crasher Playground.
-
Arraste o bloco [Drive for] para o espaço de trabalho e coloque-o sob o bloco [When started].
-
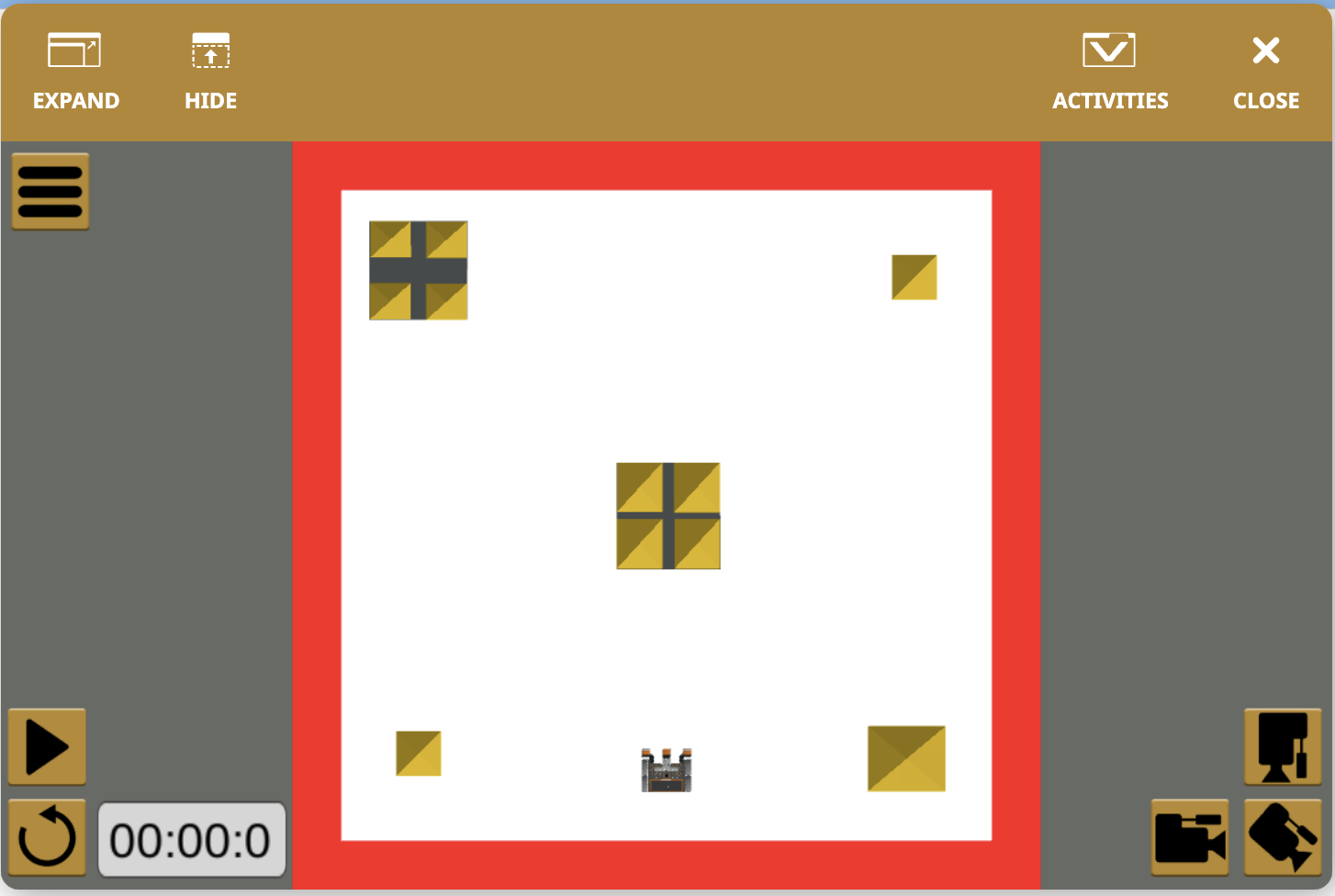
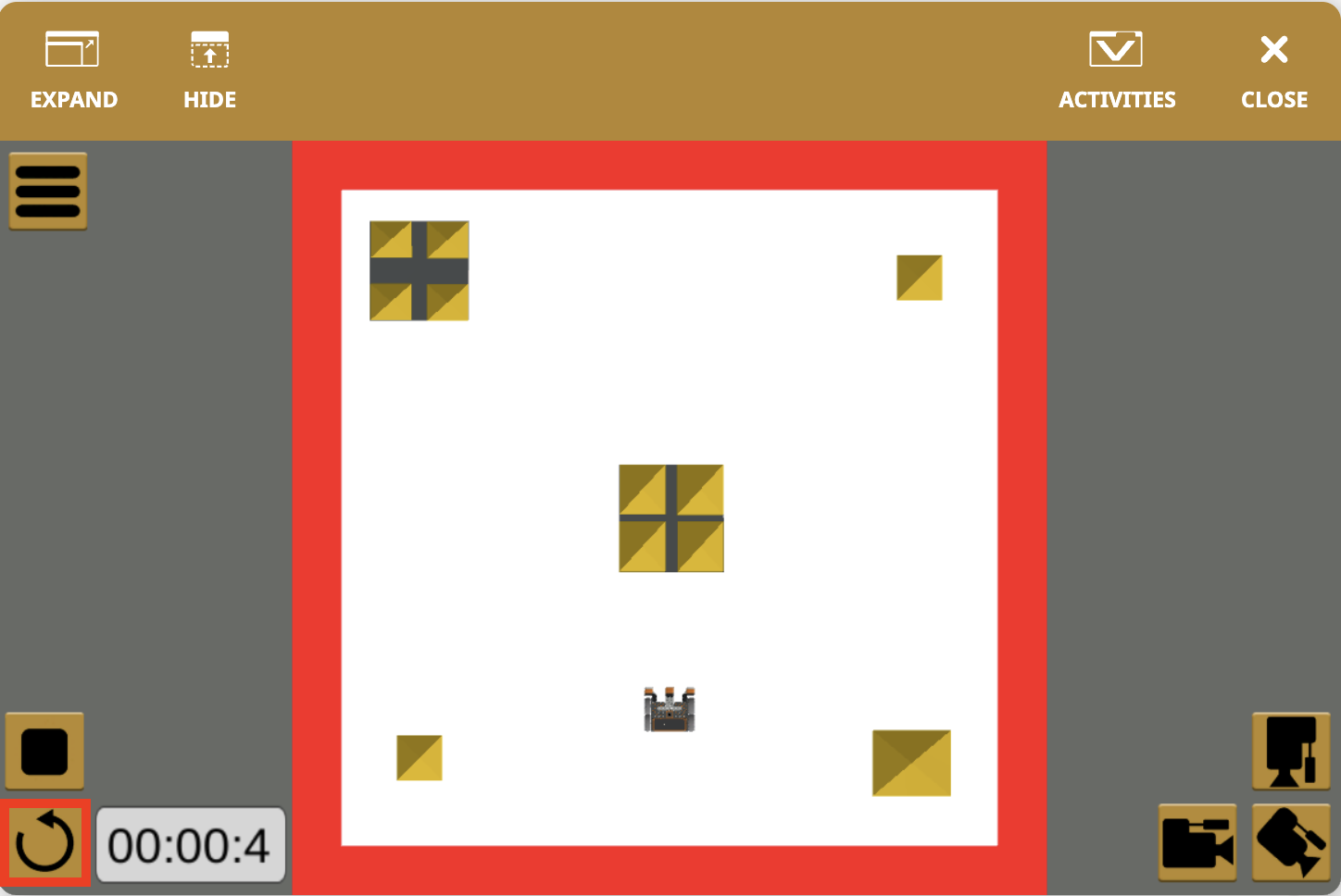
Selecione o botão "Abrir Playground" para iniciar o Castle Crasher Playground, se ainda não estiver aberto.

-
Verifique se o Castle Crasher Playground está aberto.
-
Se um Playground diferente for aberto, mude para o Castle Crasher Playground. Para alterar os Playgrounds, selecione o botão Select Playground (Selecionar Playground).

- Selecione Castle Crasher no menu Select Playground.
-
Seleccione o botão "Iniciar" para testar o projecto.

-
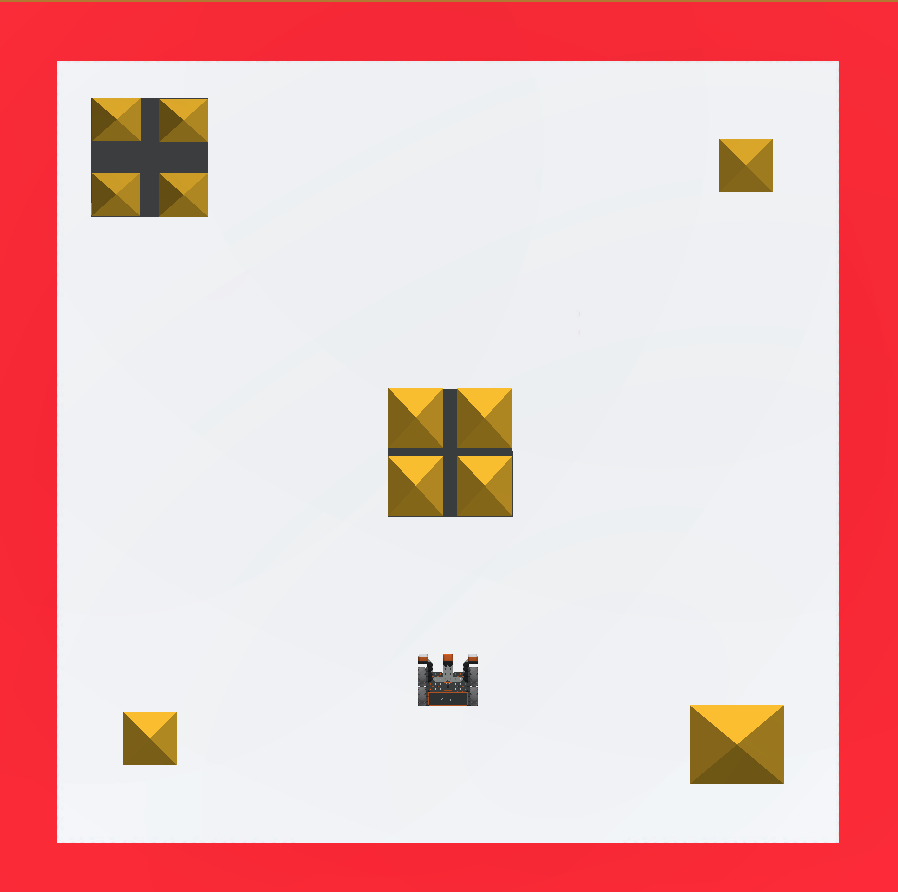
O robô VR avançará 200 mm no Castle Crasher Playground. Observe que o Robô VR não tocou no castelo central. Os parâmetros no bloco [Drive for] precisam ser ajustados para que o robô VR possa dirigir mais.
-
Selecione o botão "Reset" para reiniciar o Playground e mover o Robô VR de volta para a posição inicial.
Usando Blocos de Interruptor
Até agora, você aprendeu sobre o bloco [Drive for].

A imagem abaixo exibe o bloco Switch [Drive for] que inclui o comando Drive forward para 200 mm em Python. Se você quiser usar blocos Switch, basta clicar no bloco VEXcode [Drive for] e selecionar "Convert Block to Switch Block" ou arrastar um bloco Switch drivetrain para o espaço de trabalho e digitar o comando Python dentro do bloco.

Selecione o botão Seguinte para continuar com o resto desta lição.