
Bài 2: Lái xe đường dài - Tiến và lùi
Trong Bài học này, bạn sẽ tạo một dự án VEXcode VR sử dụng các lệnh Truyền động tiến và lùi để phá hủy lâu đài đầu tiên trong Castle Crasher Playground!
Kết quả học tập
- Xác định cách sử dụng khối [Lái xe tới] để lái Robot VR đi một khoảng cách cụ thể.
- Xác định cách thay đổi tham số trong khối [Drive for] để di chuyển Robot VR về phía trước và phía sau.
- Xác định cách sử dụng khối [Đặt tốc độ truyền động] để đặt tốc độ của hệ thống truyền động.
- Xác định phạm vi giá trị được sử dụng trong khối [Đặt tốc độ truyền động].
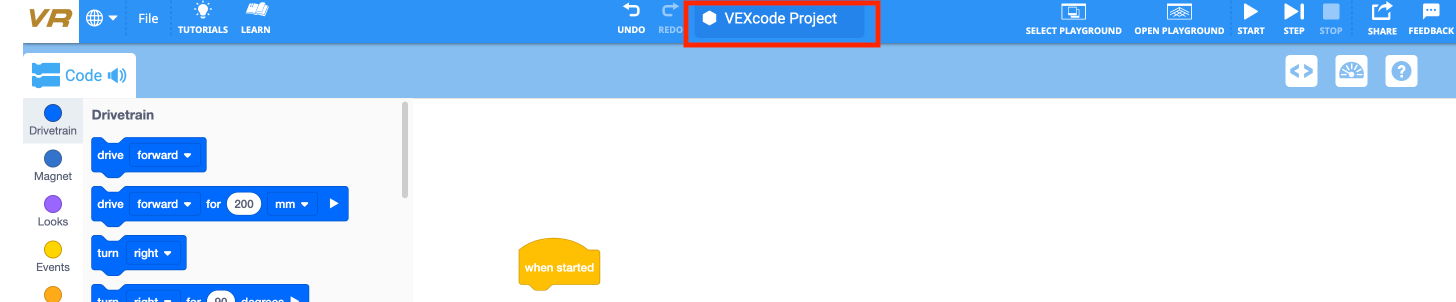
Tạo một dự án mới
Bạn phải tạo một dự án VR VEXcode để Robot VR có thể di chuyển về phía trước nhằm va chạm với lâu đài đầu tiên trong Castle Crasher Playground, sau đó lái xe ngược lại để trở về vị trí bắt đầu.
Thực hiện theo các bước sau để tạo một dự án VEXcode VR mới.
- Khởi chạy VEXcode VR tạivr.vex.com.
- Mở Menu Tệp và chọn 'Dự án Khối mới'.
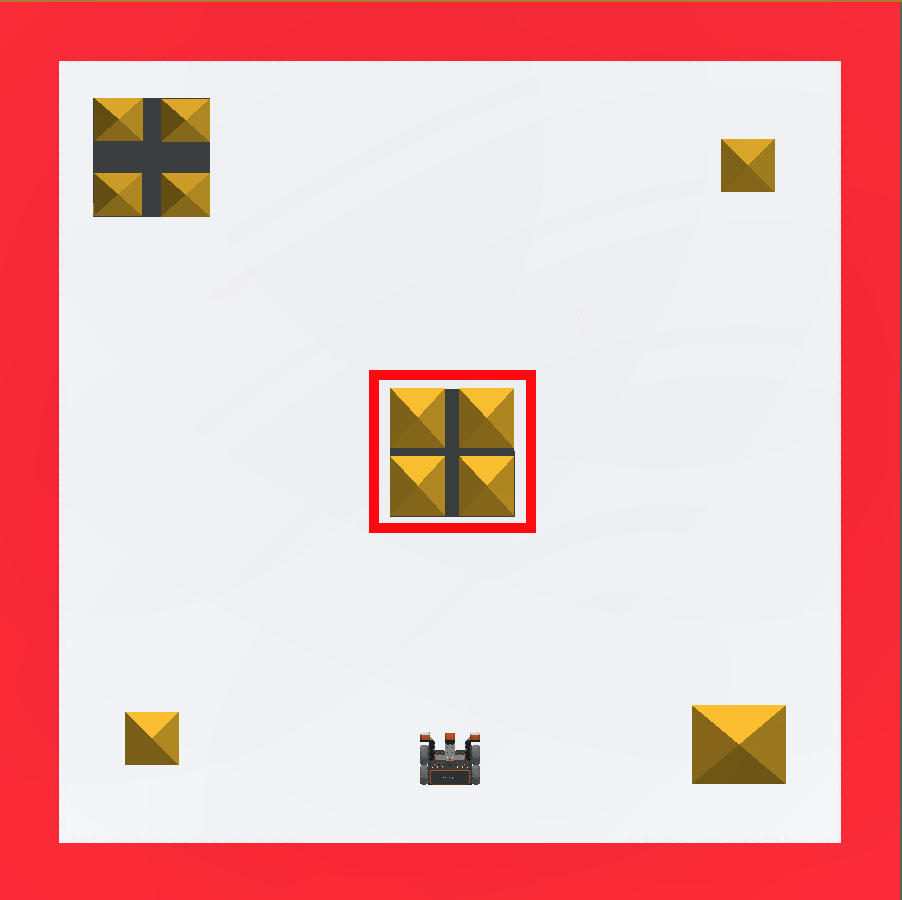
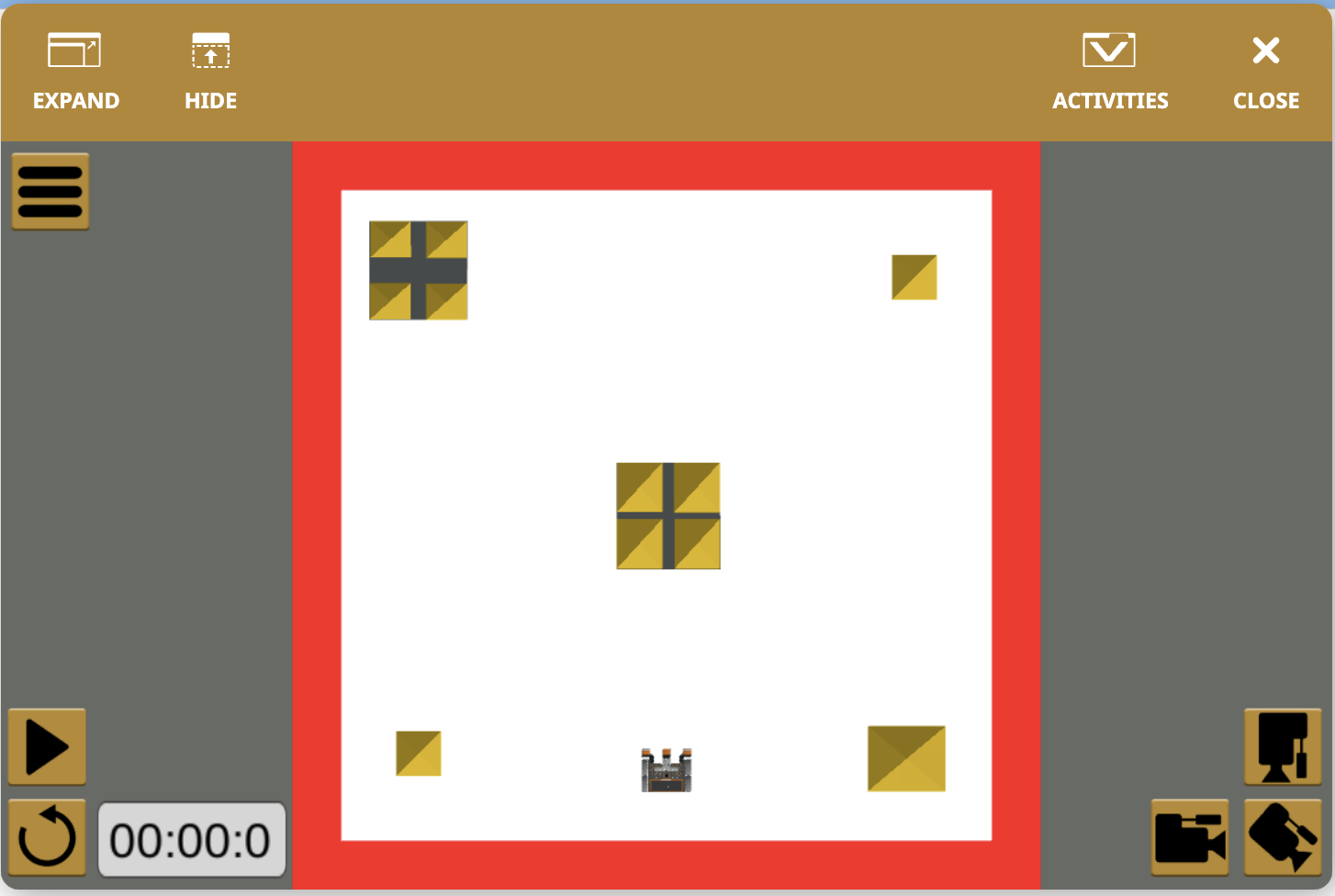
- Bạn sẽ được nhắc chọn Sân chơi. Chọn Sân chơi Castle Crasher.

- Sân chơi sẽ mở ra trong Không gian làm việc.

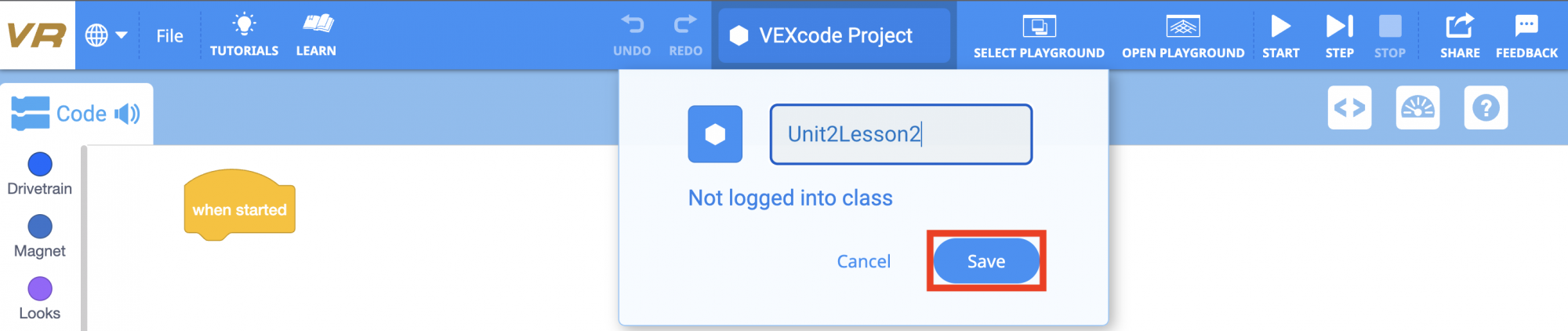
Đặt tên cho dự án của bạn
-
Để đặt tên cho dự án của bạn, hãy chọn hộp tên dự án.
-
Nhập tên dự án mới là Unit2Lesson2và chọn “Lưu”.

Lái xe về phía trước và lùi lại
Sử dụng khối [Lái tới] để lập trình cho Robot VR di chuyển về phía trước để phá hủy lâu đài đầu tiên trên Castle Crasher Sân chơi.
-
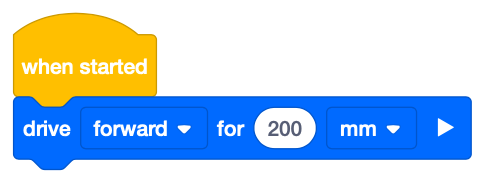
Kéo khối [Drive for] vào không gian làm việc và đặt nó bên dưới khối [When started].
-
Chọn nút “Mở Sân chơi” để khởi chạy Castle Crasher Sân chơi nếu nó chưa mở.

-
Kiểm tra để đảm bảo rằng Castle Crasher Playground đang mở.
-
Nếu một Sân chơi khác mở ra, hãy đổi sang Castle Crasher Sân chơi. Để thay đổi Sân chơi, hãy chọn nút Chọn Sân chơi.

- Chọn Castle Crasher trong menu Chọn sân chơi.
-
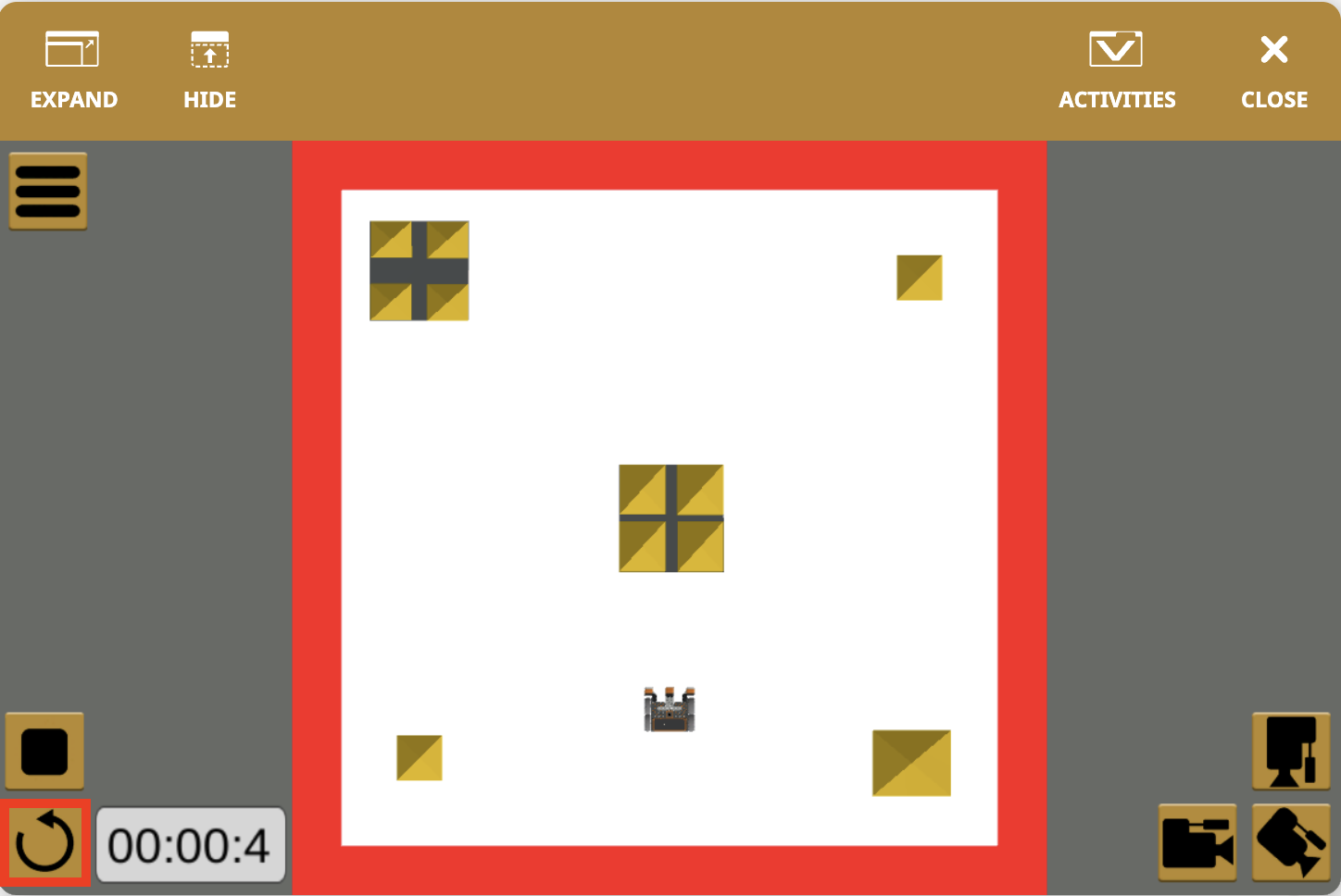
Chọn nút “Bắt đầu” để kiểm tra dự án.

-
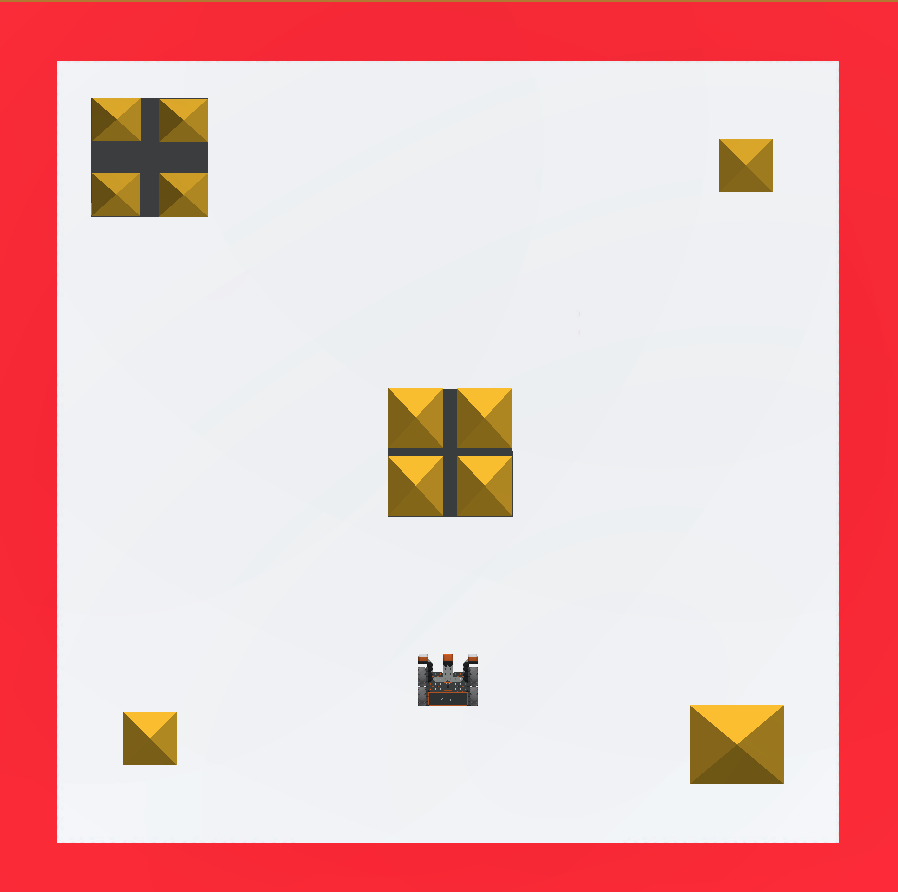
Robot VR sẽ di chuyển về phía trước 200mm trên Castle Crasher Playground. Lưu ý rằng Robot VR không chạm vào lâu đài ở giữa. Các thông số trong khối [Drive for] cần được điều chỉnh để VR Robot có thể di chuyển xa hơn.
-
Chọn nút “Đặt lại” để đặt lại Sân chơi và di chuyển Robot VR trở lại vị trí bắt đầu.
Sử dụng khối chuyển đổi
Cho đến nay, bạn đã tìm hiểu về khối [Drive for].

Hình ảnh bên dưới hiển thị khối Switch [Drive for] bao gồm lệnh Drive forward 200 mm trong Python. Nếu bạn muốn sử dụng khối Switch, chỉ cần nhấp vào khối VEXcode [Drive for] và chọn "Chuyển đổi khối thành khối Switch" hoặc kéo khối truyền động Switch vào không gian làm việc và nhập lệnh Python bên trong khối đó.

Chọn nút Tiếp theo để tiếp tục phần còn lại của Bài học này.