الدرس 1: ما هو مستشعر الموقع ؟
في هذا الدرس، ستتعلم ما هو مستشعر الموقع وكيفية استخدام مستشعر الموقع للتنقل في روبوت الواقع الافتراضي على مستوى الإحداثيات في ملعب خريطة شبكة الأرقام. سوف تتعلم كيفية عمل مستشعر الموقع وكيفية استخدام مستشعر الموقع في مشروع VEXcode VR Python.
مخرجات التعلم
- حدد أن مستشعر الموقع يقرأ الإحداثيات (X،Y) من نقطة التحول المركزية لروبوت الواقع الافتراضي.
- حدد أن الأمر الموضع يبلغ عن موضع إحداثيات X أو Y لروبوت الواقع الافتراضي إما بالمليمترات أو بالبوصات.
- صف سبب استخدام مستشعر الموقع في المشروع.
مستشعر الموقع
يحتوي روبوت الواقع الافتراضي على مستشعر موقع مدمج يبلغ عن الموضع (X،Y) لروبوت الواقع الافتراضي. يتم تحديد موقع روبوت الواقع الافتراضي من خلال نقطة تحول المركز الأمامي. هذا هو أيضًا موقع القلم على روبوت الواقع الافتراضي.

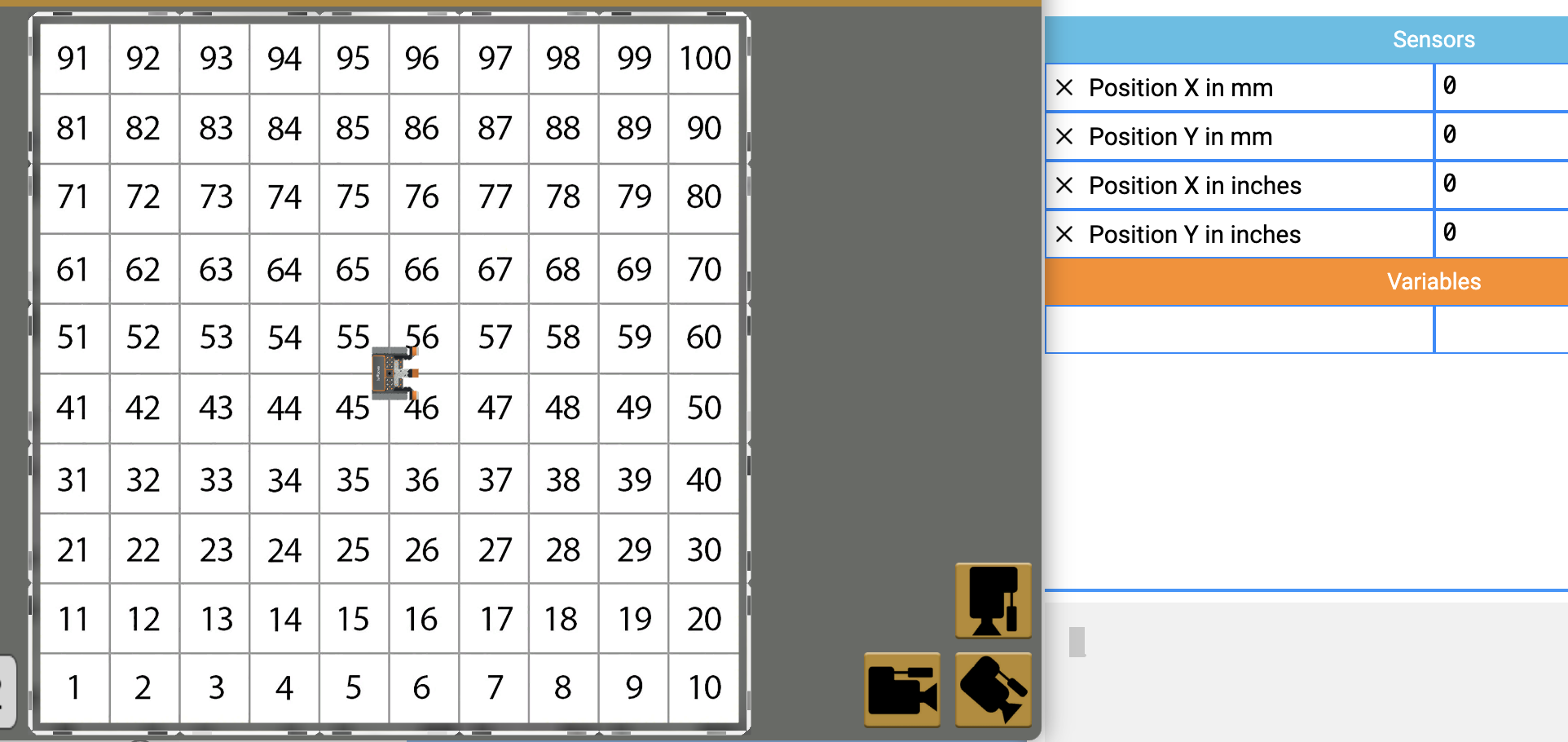
يمكن رؤية قيم مستشعر الموقع على لوحة المعلومات في VEXcode VR.
مستشعر الموقع والإحداثيات في ملاعب الواقع الافتراضي
يمكن استخدام مستشعر الموقع للتنقل في إحداثيات أي ملعب. يتراوح كل ملعب من -1000 ملليمتر (مم) إلى 1000 ملليمتر (مم) للموضعين X و Y.

تعرض لوحة معلومات VEXcode VR الموضع (X،Y) لروبوت VR المحدد من مستشعر الموقع.
عرض المقالة التالية للحصول على معلومات حول كيفية تحديد الإحداثيات (X،Y) في الملعب، وكيفية تحديد إحداثيات الموقع والزاوية الحاليين لروبوت الواقع الافتراضي.
لمزيد من المعلومات حول وحدة التحكم في الشاشة، راجع هذه المقالة.
لمزيد من المعلومات حول كيفية استخدام نظام الإحداثيات (X،Y)، وأوامر الموضع، راجع المقالة التالية.
أمر المنصب
يمكن استخدام مستشعر الموقع للتنقل في روبوت الواقع الافتراضي من أو إلى موقع دقيق على الملعب، بناءً على إحداثيات X و Y الخاصة به. يمكن استخدام البيانات من مستشعر الموقع في مشروع حتى يتمكن روبوت الواقع الافتراضي من اتخاذ قرار بناءً على موقعه المبلغ عنه على مستوى الإحداثيات.
استخدم الأمر position في مشروع نصي للإبلاغ عن موضع مستشعر الموقع. تعيد الأوامر position قيمة رقمية توضح موضع إحداثيات X أو Y لمركز مستشعر الموقع (مركز روبوت الواقع الافتراضي). اختر ما إذا كان يتم الإبلاغ عن موضع الإحداثيات X أو Y عن طريق إدخال المعلمة X أو Y.
location.position(X, MM)
location.position(Y, MM)يمكن أيضًا لأمر الموضع الإبلاغ عن القيم بالملليمتر (مم) أو البوصات.
location.position(X، MM)
location.position(X، بوصة)مثل الأمر get_distance الذي تمت مناقشته في الوحدة 5، يتم استخدام الأمر position عادةً مع بنية تحكم، مثل حلقة while ، بالإضافة إلى عامل مقارنة، بحيث يمكن لروبوت الواقع الافتراضي استخدام البيانات من مستشعر الموقع للتنقل على طول المحورين X وY إلى موقع ما. ستتعلم المزيد عن استخدام الأمر الموضع بهذه الطريقة في هذه الوحدة.
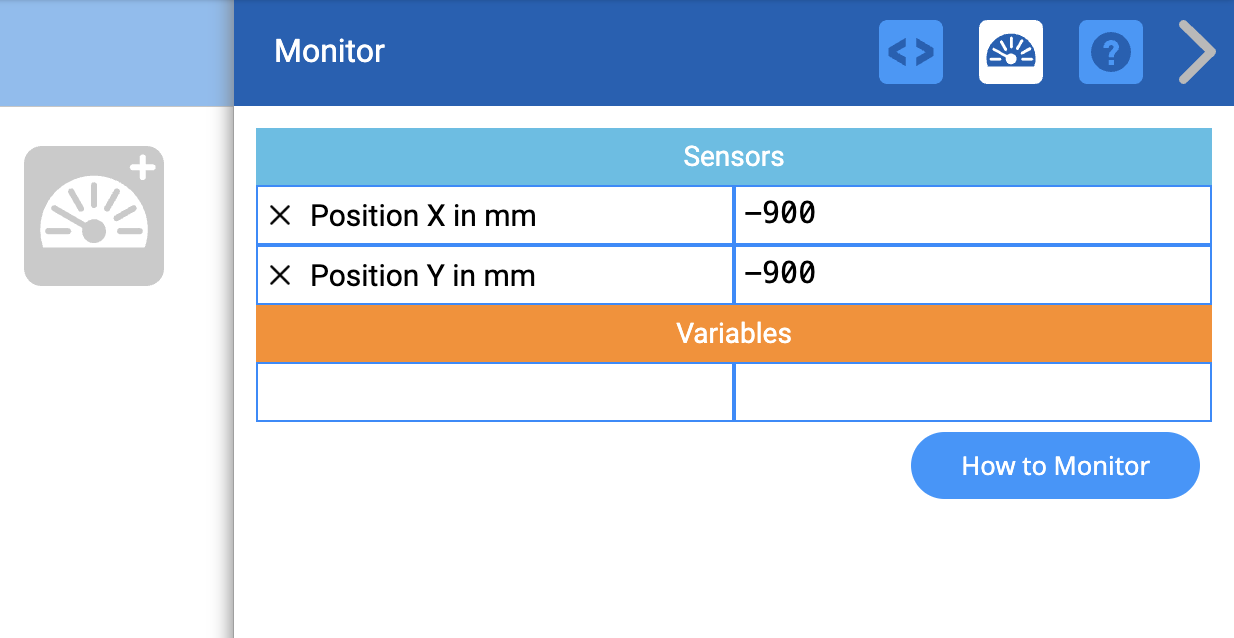
عرض بيانات مستشعر الموقع
يمكنك عرض البيانات التي تم الإبلاغ عنها بواسطة مستشعر الموقع في لوحة معلومات الواقع الافتراضي، أو عبر وحدة تحكم الشاشة. قم بتحميل وتشغيل مشروع مثال "الموقع" لمعرفة كيفية الإبلاغ عن بيانات مستشعر الموقع، بحيث يمكنك استخدامها في مشروع للتنقل في روبوت الواقع الافتراضي إلى موقع معين.
لمعلوماتك
يمكن أيضًا استخدام مستشعر الموقع للإبلاغ عن زاوية موضع روبوت الواقع الافتراضي بالدرجات. قد يكون هذا مفيدًا عند محاولة الانتقال إلى موقع دقيق، أو الانتقال من موقعك الحالي بمقدار دقيق.
يمكن استخدام الأمر position_angle للإبلاغ عن القيمة العددية لزاوية موضع روبوت الواقع الافتراضي بالدرجات.
location.position_angle(درجة)يستخدم مشروع مثال "استشعار الموقع" القيم التي أبلغ عنها مستشعر الموقع باستخدام كل من الأمرين position و position_ angle.
- في VEXcode VR، حدد "Open Examples" (فتح أمثلة) من القائمة المنسدلة File (ملف).
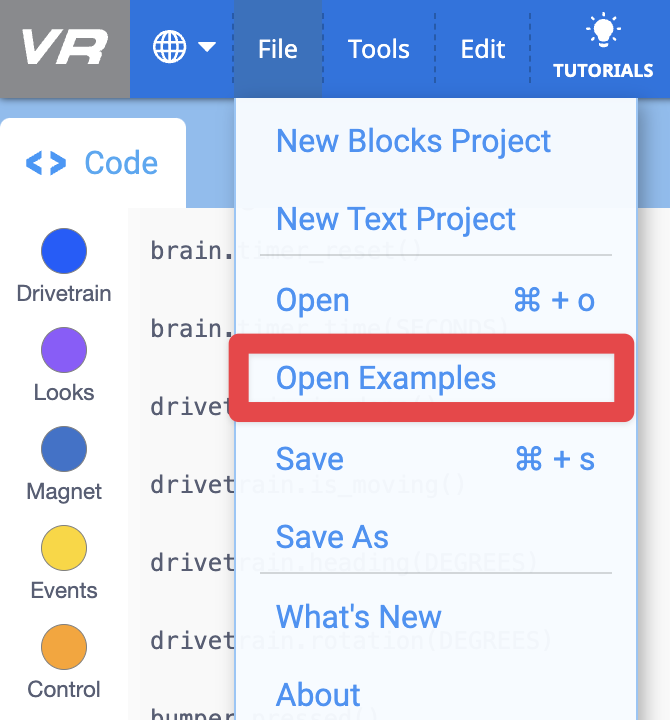
- حدد مشروع مثال "الموقع".
- افتح نافذة الملعب إذا لم تكن مفتوحة بالفعل. تأكد من فتح Playground Map Map ، ثم قم بتشغيل المشروع. يظهر هذا المشروع أيضًا هنا.
# Add project code in "main"
def main ():
# سيقود الروبوت حتى يمر 0 على المحور Y
بينما location.position (Y, MM) < 0: drivetrain.drive (
FORWARD)
wait(5, MSEC) drivetrain.turn_for
(RIGHT, 90, DEGREES)
# سيقود الروبوت حتى يمر 0 على المحور X
بينما location.position (X, MM) < 0: drivetrain.drive
(FORWARD)
wait(5, MSEC)
drivetrain.stop ()
# VR threads — لا تحذف
vr_thread(main)- لاحظ أن روبوت الواقع الافتراضي يقود حتى يكون الإحداثي Y أكبر من الصفر، ويدور يمينًا، ثم يقود حتى يكون الإحداثي X أكبر من الصفر. هذا يضع روبوت الواقع الافتراضي بالقرب من مركز ملعب خريطة شبكة الأرقام، بالقرب من الموقع (0، 0).