
Lektion 1: Was ist der Positionssensor?
In dieser Lektion erfahren Sie, was der Positionssensor ist und wie Sie den Positionssensor verwenden, um den VR-Roboter auf der Koordinatenebene auf dem Number Grid Map Playground zu navigieren. Sie erfahren, wie der Positionssensor funktioniert und wie Sie den Positionssensor in einem VEXcode VR Python-Projekt verwenden.
Lernergebnisse
- Stellen Sie sicher, dass der Positionssensor (X,Y) -Koordinaten vom zentralen Wendepunkt eines VR-Roboters abliest.
- Stellen Sie fest, dass der Positionsbefehl die X- oder Y-Koordinatenposition eines VR-Roboters entweder in Millimetern oder Zoll meldet.
- Beschreiben Sie, warum der Positionssensor in einem Projekt verwendet wird.
Positionssensor
Ein VR-Roboter verfügt über einen eingebauten Positionssensor, der die (X,Y) -Position des VR-Roboters meldet. Die Position des VR-Roboters wird durch den Wendepunkt vorne in der Mitte bestimmt. Dies ist auch die Position des Stiftes auf dem VR-Roboter.

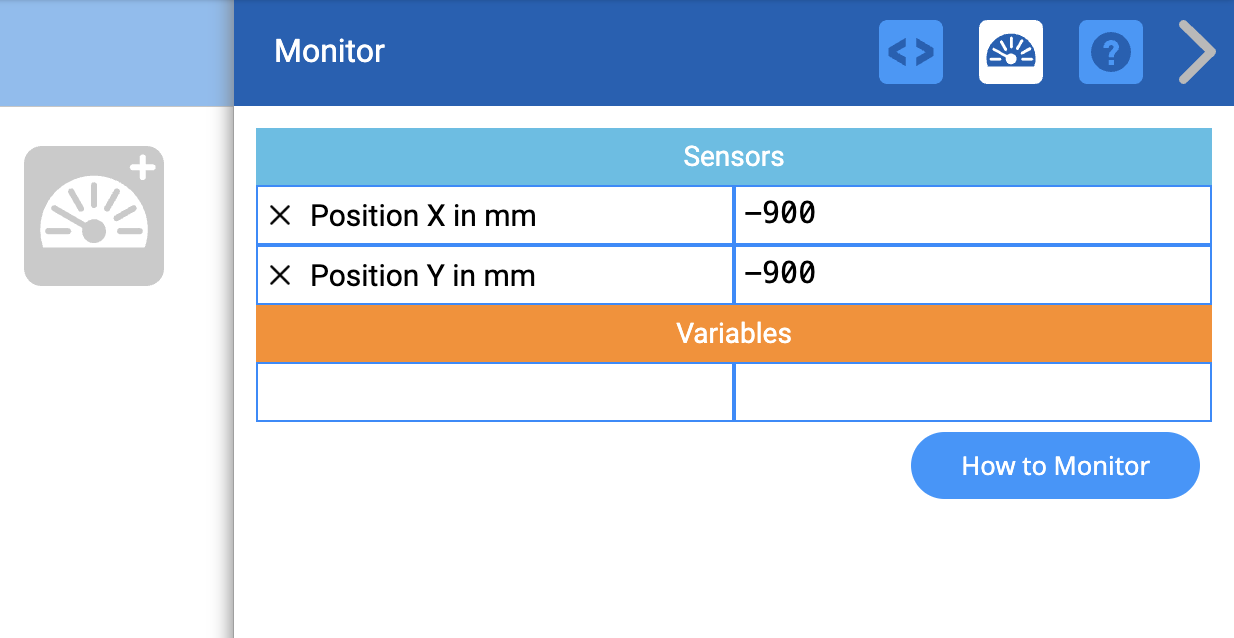
Die Werte des Positionssensors sind auf dem Dashboard in VEXcode VR zu sehen.
Positionssensor und Koordinaten in VR-Spielplätzen
Der Positionssensor kann verwendet werden, um die Koordinaten eines beliebigen Spielplatzes zu navigieren. Jeder Spielplatz reicht von -1000 Millimeter (mm) bis 1000 Millimeter (mm) für die X- und Y-Position.

Das VEXcode VR-Dashboard zeigt die (X,Y) -Position eines VR-Roboters an, die vom Positionssensor ermittelt wurde.
Im folgenden Artikel finden Sie Informationen zum Identifizieren der (X-,Y-) Koordinaten auf einem Spielplatz und zum Identifizieren der Koordinaten des aktuellen Standorts und Winkels eines VR-Roboters.
Weitere Informationen zur Monitorkonsole finden Sie in diesem Artikel.
Weitere Informationen zur Verwendung des Koordinatensystems (X,Y) und der Positionsbefehle finden Sie im folgenden Artikel.
Positionsbefehl
Der Positionssensor kann verwendet werden, um den VR-Roboter basierend auf seinen X-, Y-Koordinaten zu oder von einem genauen Standort auf einem Spielplatz zu navigieren. Die Daten des Positionssensors können in einem Projekt verwendet werden, sodass der VR-Roboter eine Entscheidung basierend auf seiner gemeldeten Position auf der Koordinatenebene treffen kann.
Verwenden Sie den Positionsbefehl in einem Textprojekt, um die Position des Positionssensors zu melden. Der Positionsbefehl gibt einen numerischen Wert zurück, der die X- oder Y-Koordinatenposition der Mitte des Positionssensors (der Mitte des VR-Roboters) meldet. Wählen Sie, ob die X- oder Y-Koordinatenposition durch Eingabe des X- oder Y-Parameters gemeldet wird.
location.position(X, MM)
location.position(Y, MM)Der Positionsbefehl kann auch Werte in Millimetern (mm) oder Zoll melden.
location.position(X, MM)
location.position(X, ZOLL)Wie der in Einheit 5 besprochene Befehl get_distance wird der Befehl position normalerweise mit einer Kontrollstruktur, wie einer while -Schleife, sowie einem Vergleichsoperator verwendet, sodass der VR-Roboter die Daten vom Standortsensor verwenden kann, um entlang der X- und Y-Achse zu einem Standort zu navigieren. In dieser Einheit erfahren Sie mehr über die Verwendung des Positionsbefehls auf diese Weise.
Anzeigen von Positionssensordaten
Sie können die vom Positionssensor gemeldeten Daten im VR-Dashboard oder über die Monitorkonsole anzeigen. Laden und führen Sie das Beispielprojekt „Standort“ aus, um zu sehen, wie Standortsensordaten gemeldet werden, damit Sie sie in einem Projekt verwenden können, um den VR-Roboter zu einem bestimmten Standort zu navigieren.
Zur Kenntnisnahme
Der Positionssensor kann auch verwendet werden, um den Winkel der Position des VR-Roboters in Grad zu melden. Dies kann nützlich sein, wenn Sie versuchen, sich an eine genaue Position zu drehen oder sich von Ihrer aktuellen Position um einen bestimmten Betrag zu bewegen.
Mit dem Befehl position_angle kann der numerische Wert des Positionswinkels des VR-Roboters in Grad gemeldet werden.
location.position_angle(GRAD)Das Beispielprojekt „Standorterkennung“ verwendet die vom Standortsensor gemeldeten Werte, indem die Befehle position und position_angle verwendet werden.
- Wählen Sie in VEXcode VR "Beispiele öffnen" aus dem Dropdown-Menü Datei.
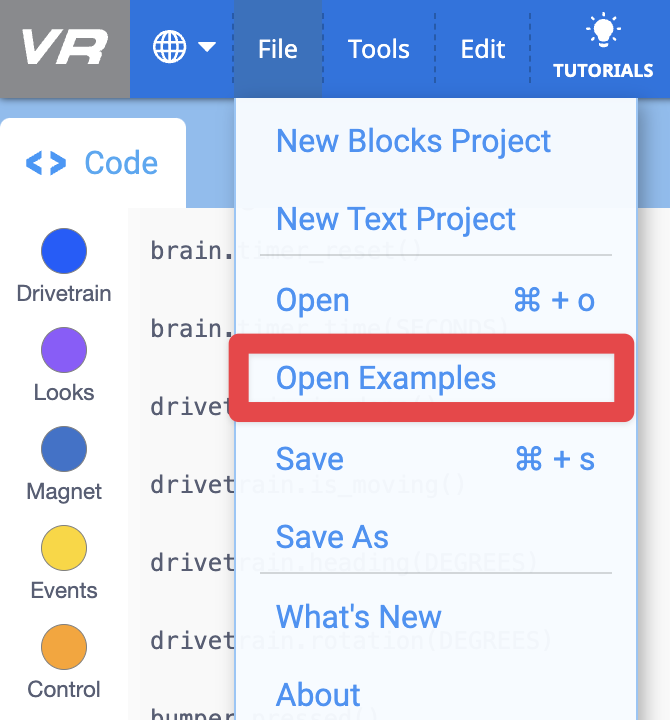
- Wählen Sie das Beispielprojekt „Standort“ aus.
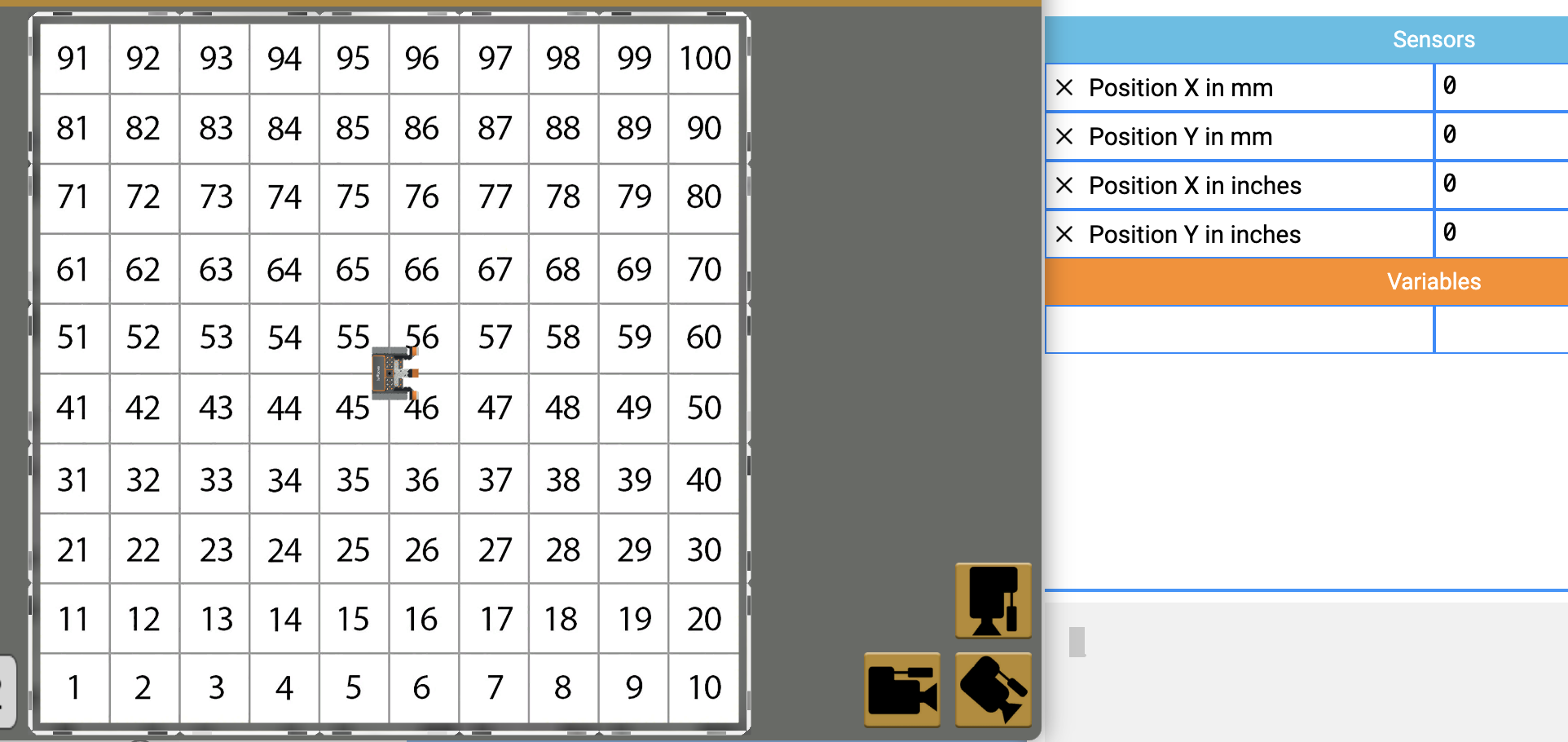
- Öffnen Sie das Playground-Fenster , wenn es noch nicht geöffnet ist. Stellen Sie sicher, dass sich der Number Grid Map Playground öffnet, und führen Sie das Projekt aus. Dieses Projekt wird auch hier gezeigt.
# Fügen Sie Projektcode in "main"
def main() hinzu:
# Der Roboter fährt, bis er 0 auf der Y-Achse passiert,
während location.position (Y, MM) < 0
: drivetrain.drive (FORWARD)
wait(5, MSEC
) drivetrain.turn_for (RIGHT, 90, DEGREES)
# Der Roboter fährt, bis er 0 auf der X-Achse passiert,
während location.position (X, MM) <
0: drivetrain.drive (FORWARD)
wait(5,
MSEC) drivetrain.stop ()
# VR-Threads —
vr_thread(main) nicht löschen- Beachten Sie, dass der VR-Roboter fährt, bis die Y-Koordinate größer als Null ist, nach rechts abbiegt und dann fährt, bis die X-Koordinate größer als Null ist. Dadurch wird der VR-Roboter in der Nähe der Mitte des Number Grid Map Playground in der Nähe der Position (0, 0) platziert.
Fragen
Bitte wählen Sie unten einen Link aus, um auf das Lektionsquiz zuzugreifen.
Google Doc / .docx / .pdf