
Lección 1: ¿Qué es el sensor de ubicación?
En esta lección, aprenderá qué es el sensor de ubicación y cómo usar el sensor de ubicación para navegar por el robot VR en el plano de coordenadas en el patio de juegos del mapa de cuadrícula numérica. Aprenderá cómo funciona el sensor de ubicación y cómo usar el sensor de ubicación en un proyecto VEXcode VR Python.
Resultados de aprendizaje
- Identifique que el sensor de ubicación lee las coordenadas (X,Y) desde el punto de giro central de un robot VR.
- Identifique que el comando de posición informa la posición de las coordenadas X o Y de un robot VR en milímetros o pulgadas.
- Describa por qué se usaría el sensor de ubicación en un proyecto.
Sensor de ubicación
Un robot VR tiene un sensor de ubicación incorporado que informa la posición (X,Y) del robot VR. La ubicación del robot VR está determinada por el punto de inflexión del centro delantero. Esta es también la ubicación del lápiz en el robot de realidad virtual.

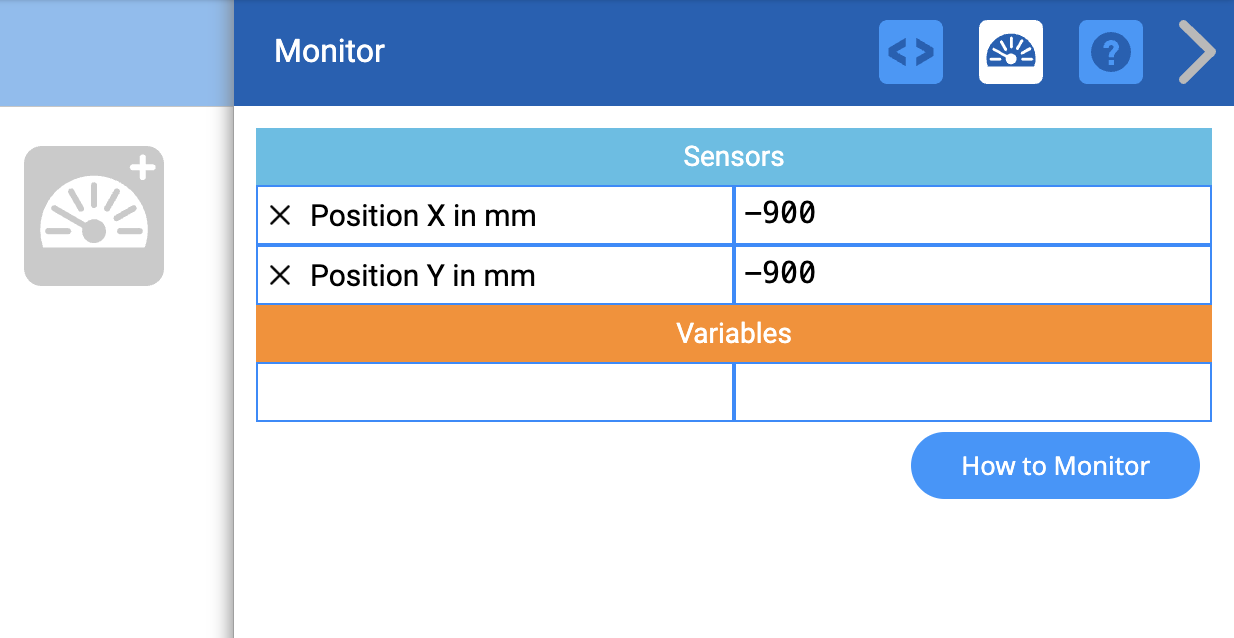
Los valores del sensor de ubicación se pueden ver en el panel de control en VEXcode VR.
Sensor de ubicación y coordenadas en parques infantiles de realidad virtual
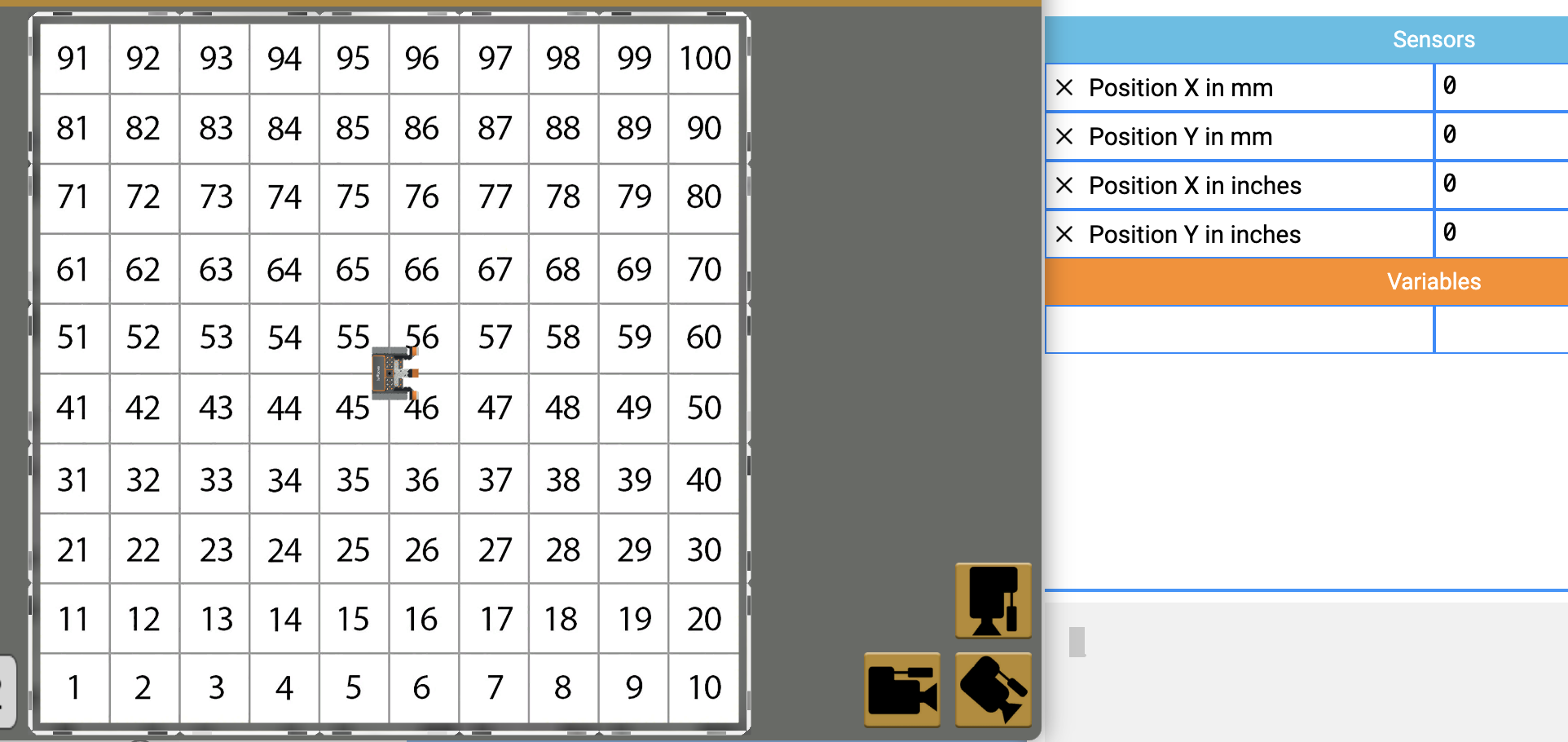
El sensor de ubicación se puede utilizar para navegar por las coordenadas de cualquier parque infantil. Cada patio de recreo oscila entre -1000 milímetros (mm) y 1000 milímetros (mm) para las posiciones X e Y.

El panel de control de VEXcode VR muestra la posición (X,Y) de un robot VR determinada a partir del sensor de ubicación.
Consulte el siguiente artículo para obtener información sobre cómo identificar las coordenadas (X,Y) en un patio de recreo y cómo identificar las coordenadas de la ubicación y el ángulo actuales de un robot de realidad virtual.
Para obtener más información sobre la Consola del monitor, consulte este artículo.
Para obtener más información sobre cómo utilizar el sistema de coordenadas (X,Y) y los comandos de posición, consulte el siguiente artículo.
Comando de posición
El sensor de ubicación se puede utilizar para navegar el robot VR hacia o desde una ubicación precisa en un patio de recreo, en función de sus coordenadas X, Y. Los datos del sensor de ubicación se pueden utilizar en un proyecto para que el robot VR pueda tomar una decisión en función de su posición informada en el plano de coordenadas.
Utilice el comando posición en un proyecto de texto para informar la posición del sensor de ubicación. El comando position devuelve un valor numérico que informa la posición de la coordenada X o Y del centro del sensor de ubicación (el centro del robot VR). Elija si la posición de las coordenadas X o Y se informa introduciendo el parámetro X o Y.
location.position(X, MM)
location.position(Y, MM)El comando de posición también puede informar valores en milímetros (mm) o pulgadas.
location.position(X, MM)
location.position(X, PULGADAS)Al igual que el comando get_distance analizado en la Unidad 5, el comando position se utiliza normalmente con una estructura de control, como un bucle while , así como un operador de comparación, de modo que el robot VR pueda usar los datos del sensor de ubicación para navegar a lo largo de los ejes X e Y hasta una ubicación. Aprenderá más sobre cómo utilizar el comando de posición de esta manera en esta Unidad.
Visualización de datos del sensor de ubicación
Puede ver los datos informados por el sensor de ubicación en el panel de VR o a través de la consola del monitor. Cargue y ejecute el proyecto de ejemplo "Ubicación" para ver cómo se informan los datos del sensor de ubicación, de modo que pueda usarlos en un proyecto para navegar el robot VR a una ubicación específica.
Para su información
El sensor de ubicación también se puede utilizar para informar el ángulo de la posición del robot VR en grados. Esto puede ser útil cuando se trata de girar a una ubicación precisa, o para mover de su posición actual una cantidad precisa.
El comando position_angle se puede utilizar para informar el valor numérico del ángulo de posición del robot VR en grados.
location.position_angle(GRADOS)El proyecto de ejemplo 'Detección de ubicación' utiliza los valores informados por el sensor de ubicación mediante los comandos position y position_angle .
- En VEXcode VR, seleccione "Abrir ejemplos" en el menú desplegable Archivo.
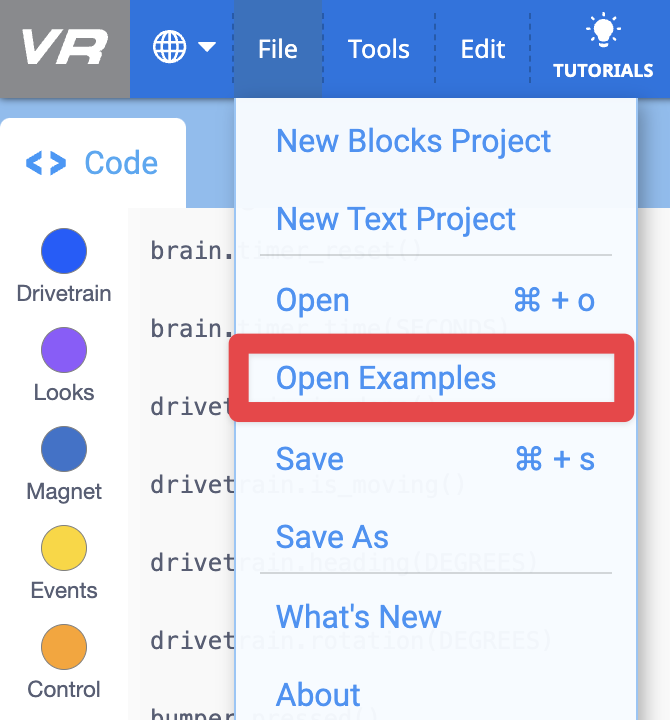
- Seleccione el proyecto de ejemplo "Ubicación".
- Abra la ventana del patio de recreo si aún no está abierta. Asegúrese de que se abra el mapa de cuadrícula de números del patio de juegos y ejecute el proyecto. Este proyecto también se muestra aquí.
# Add project code in "main"
def main():
# The robot will drive until it passes 0 on the Y axis
while location.position (Y, MM) < 0:
drivetrain.drive (FORWARD)
wait(5, MSEC)
drivetrain.turn_for (RIGHT, 90, DEGREES)
# The robot will drive until it passes 0 on the X axis
while location.position (X, MM) < 0:
drivetrain.drive (FORWARD)
wait(5, MSEC)
drivetrain.stop ()
# VR threads — Do not delete
vr_thread(main)- Observe que el robot VR conduce hasta que la coordenada Y es mayor que cero, gira a la derecha y luego conduce hasta que la coordenada X es mayor que cero. Esto coloca el robot VR cerca del centro del patio de juegos del mapa de cuadrícula numérica, cerca de la ubicación (0, 0).
Preguntas
Seleccione un enlace a continuación para acceder al cuestionario de la lección.
Google Doc / .docx / .pdf