Pelajaran 1: Apa itu Sensor Lokasi?
Dalam Pelajaran ini, Anda akan mempelajari apa itu Sensor Lokasi dan cara menggunakan Sensor Lokasi untuk menavigasi Robot VR pada bidang koordinat di Peta Kotak Angka Playground. Anda akan mempelajari cara kerja Sensor Lokasi dan cara menggunakan Sensor Lokasi dalam proyek Python VEXcode VR.
Hasil belajar
- Identifikasi bahwa Sensor Lokasi membaca koordinat (X,Y) dari titik balik tengah Robot VR.
- Identifikasi bahwa perintah posisimelaporkan posisi koordinat X atau Y dari Robot VR dalam milimeter atau inci.
- Jelaskan mengapa Sensor Lokasi akan digunakan dalam suatu proyek.
Sensor Lokasi
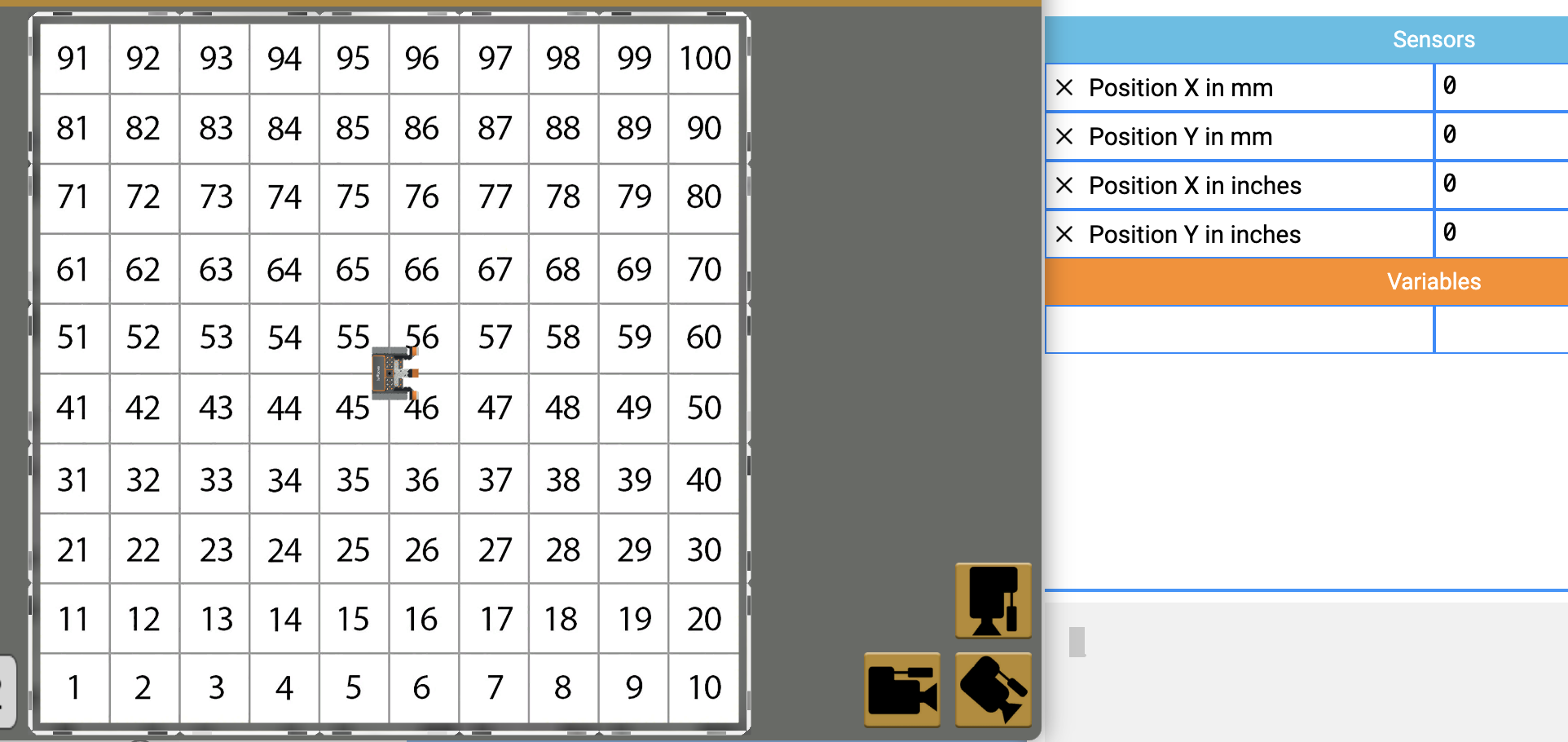
Robot VR memiliki Sensor Lokasi yang terpasang di dalamnya yang melaporkan posisi (X,Y) Robot VR. Lokasi Robot VR ditentukan oleh titik balik bagian tengah depan. Ini juga merupakan lokasi Pena pada Robot VR.

Nilai Sensor Lokasi dapat dilihat di Dashboard di VEXcode VR.
Sensor Lokasi dan Koordinat di Taman Bermain VR
Sensor Lokasi dapat digunakan untuk menavigasi koordinat Taman Bermain mana pun. Setiap Playground berkisar dari -1000 milimeter (mm) hingga 1000 milimeter (mm) untuk posisi X dan Y.

Dasbor VR VEXcode menampilkan posisi (X,Y) Robot VR yang ditentukan dari Sensor Lokasi.
Lihat artikel berikut untuk informasi tentang cara Mengidentifikasi koordinat (X,Y) di Taman Bermain, dan cara mengidentifikasi koordinat lokasi dan sudut Robot VR saat ini.
Untuk informasi lebih lanjut tentang Monitor Console, lihat artikel ini.
Untuk informasi lebih lanjut tentang cara menggunakan sistem koordinat (X,Y), dan perintah posisi, lihat artikel berikut.
Posisi Komando
Sensor Lokasi dapat digunakan untuk menavigasi Robot VR ke atau dari lokasi tertentu di Taman Bermain, berdasarkan koordinat X, Y. Data dari Sensor Lokasi dapat digunakan dalam suatu proyek sehingga Robot VR dapat membuat keputusan berdasarkan posisi yang dilaporkan pada bidang koordinat.
Gunakan perintah posisi dalam proyek Teks untuk melaporkan posisi Sensor Lokasi. Perintah posisi mengembalikan nilai numerik yang melaporkan posisi koordinat X atau Y dari pusat Sensor Lokasi (pusat Robot VR). Pilih apakah posisi koordinat X atau Y dilaporkan dengan memasukkan parameter X atau Y.
lokasi.posisi(X, MM)
lokasi.posisi(Y, MM)Perintahposisi juga dapat melaporkan nilai dalam milimeter (mm) atau inci.
lokasi.posisi(X, MM)
lokasi.posisi(X, INCI)Seperti perintah get_distance yang dibahas dalam Unit 5, perintahposition biasanya digunakan dengan struktur kontrol, seperti loopwhile , serta operator perbandingan, sehingga Robot VR dapat menggunakan data dari Sensor Lokasi untuk menavigasi sepanjang sumbu X dan Y ke suatu lokasi. Anda akan mempelajari lebih lanjut tentang penggunaan perintahposisi dengan cara ini di Unit ini.
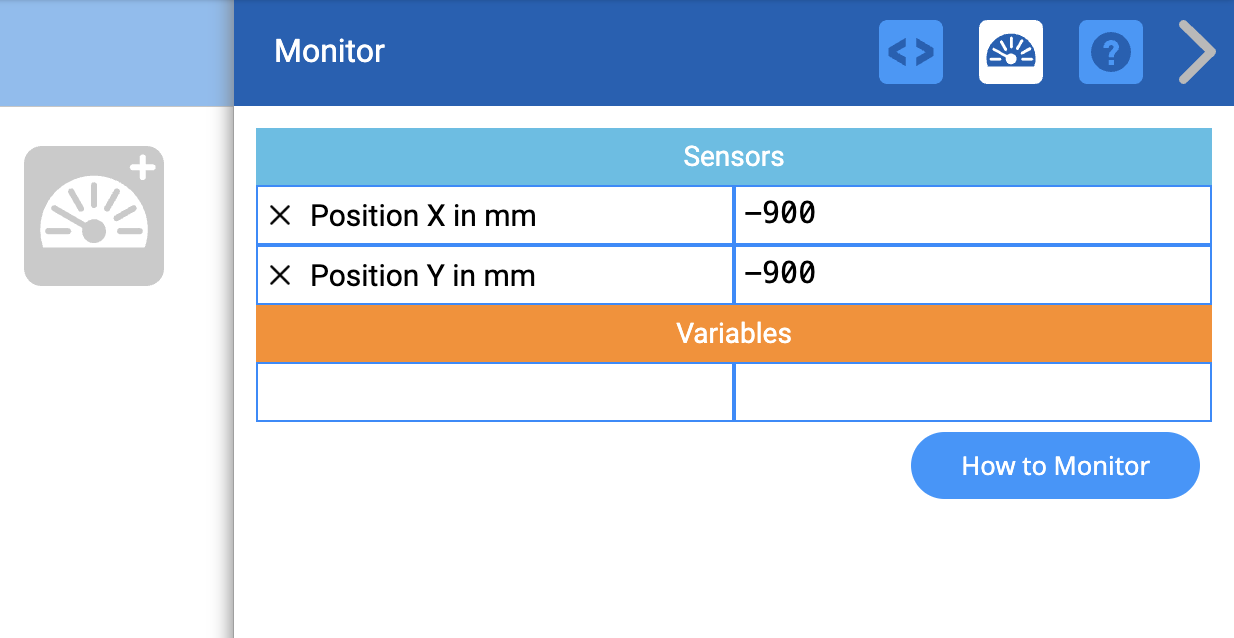
Melihat Data Sensor Lokasi
Anda dapat melihat data yang dilaporkan oleh Sensor Lokasi di Dasbor VR, atau melalui Konsol Monitor. Muat dan jalankan proyek contoh "Lokasi" untuk melihat bagaimana data Sensor Lokasi dilaporkan, sehingga Anda dapat menggunakannya dalam proyek untuk menavigasi Robot VR ke lokasi tertentu.
Untuk Informasi Anda
Sensor Lokasi juga dapat digunakan untuk melaporkan sudut posisi Robot VR dalam derajat. Ini dapat berguna saat mencoba berbelok ke lokasi tertentu, atau bergerak dari posisi Anda saat ini dalam jumlah tertentu.
Perintahposition_angledapat digunakan untuk melaporkan nilai numerik sudut posisi Robot VR dalam derajat.
lokasi.sudut_posisi(DERAJAT)Proyek Contoh 'Penginderaan Lokasi' menggunakan nilai yang dilaporkan oleh Sensor Lokasi dengan menggunakan perintahposisidanposisi_sudut.
- Di VEXcode VR, pilih “Buka Contoh” dari menu tarik-turun File.
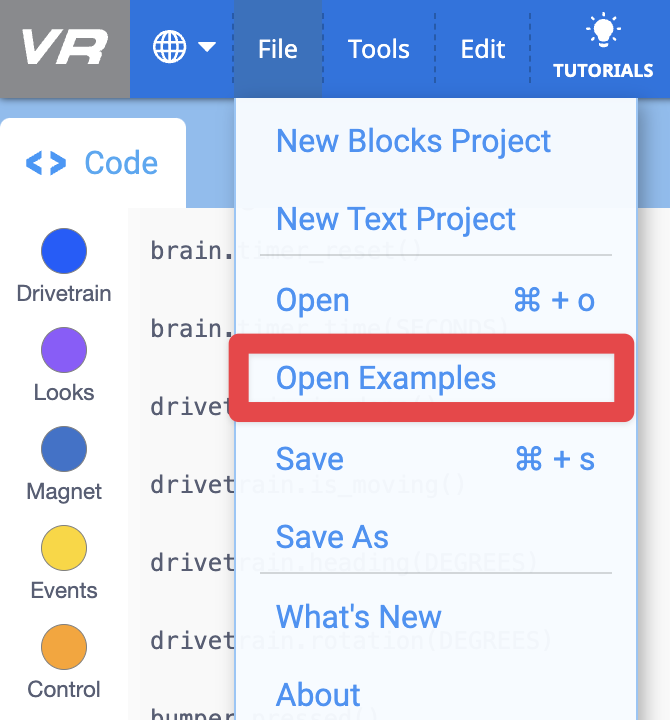
- Pilih proyek contoh “Lokasi”.
- Buka Jendela Taman Bermain jika belum terbuka. Pastikan Number Grid Map Playgroundterbuka, lalu jalankan proyek. Proyek ini juga ditampilkan di sini.
# Tambahkan kode proyek di "utama"
def main():
# Robot akan melaju hingga melewati 0 pada sumbu Y
while location.position(Y, MM) < 0:
drivetrain.drive(MAJU)
wait(5, MSEC)
drivetrain.turn_for(KANAN, 90, DERAJAT)
# Robot akan melaju hingga melewati 0 pada sumbu X
while location.position(X, MM) < 0:
drivetrain.drive(MAJU)
wait(5, MSEC)
drivetrain.stop()
# Utas VR — Jangan dihapus
vr_thread(utama)- Perhatikan bahwa Robot VR melaju hingga koordinat Y lebih besar dari nol, berbelok ke kanan, lalu melaju hingga koordinat X lebih besar dari nol. Ini menempatkan Robot VR dekat dengan pusat Number Grid Map Playground, dekat lokasi (0, 0).