পাঠ ১: লোকেশন সেন্সর কী?
এই পাঠে, আপনি শিখবেন লোকেশন সেন্সর কী এবং নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ডএর স্থানাঙ্ক সমতলে VR রোবট নেভিগেট করার জন্য লোকেশন সেন্সর কীভাবে ব্যবহার করবেন। আপনি শিখবেন কিভাবে লোকেশন সেন্সর কাজ করে এবং কিভাবে VEXcode VR পাইথন প্রকল্পে লোকেশন সেন্সর ব্যবহার করতে হয়।
শেখার ফলাফল
- একটি VR রোবটের কেন্দ্র বাঁক থেকে অবস্থান সেন্সর (X,Y) স্থানাঙ্ক পড়ছে কিনা তা শনাক্ত করুন।
- পজিশনকমান্ডটি একটি VR রোবটের X অথবা Y স্থানাঙ্কের অবস্থান মিলিমিটার অথবা ইঞ্চিতে রিপোর্ট করে কিনা তা চিহ্নিত করুন।
- একটি প্রকল্পে লোকেশন সেন্সর কেন ব্যবহার করা হবে তা বর্ণনা করুন।
অবস্থান সেন্সর
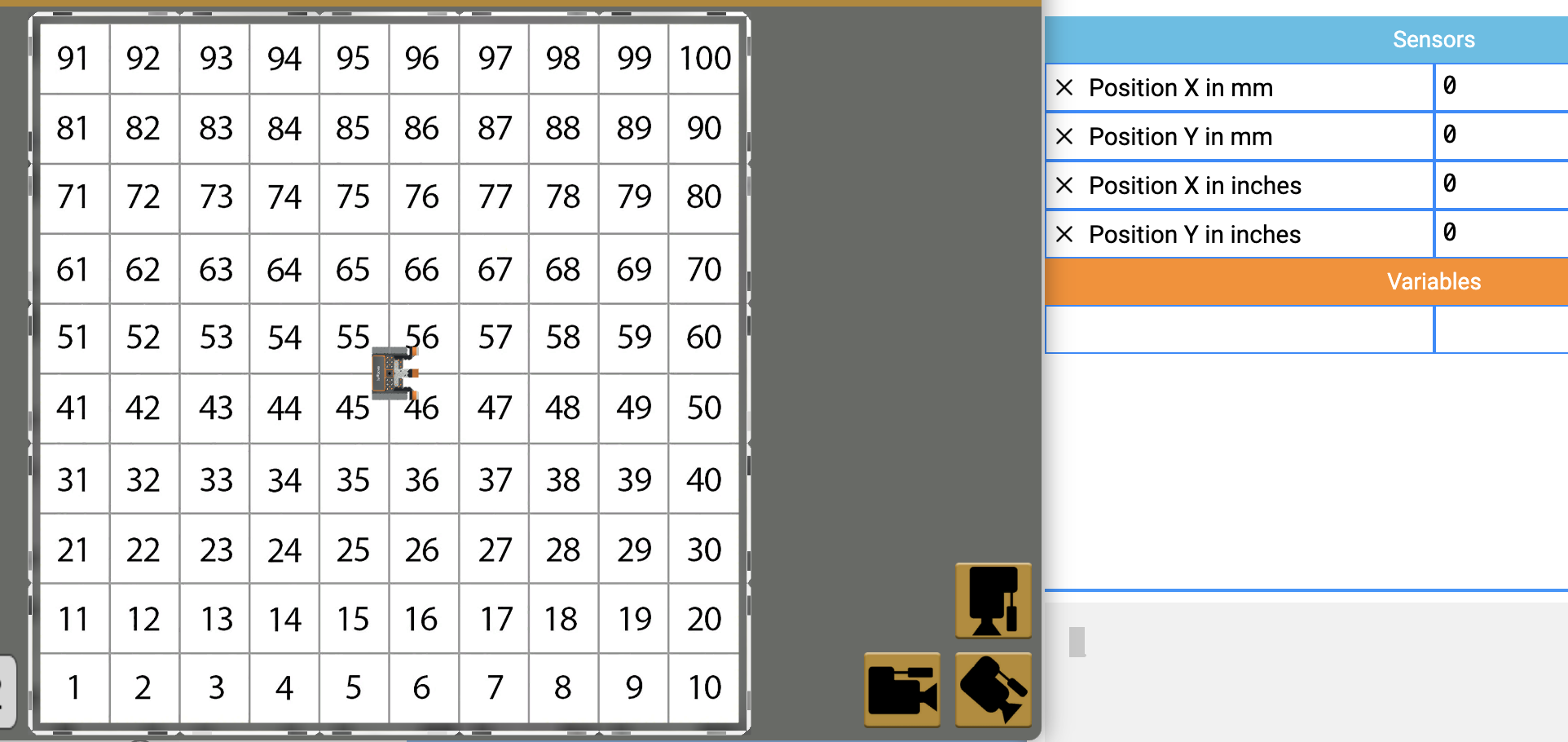
একটি ভিআর রোবটে একটি লোকেশন সেন্সর থাকে যা ভিআর রোবটের (X,Y) অবস্থান রিপোর্ট করে। ভিআর রোবটের অবস্থান নির্ধারিত হয় ফ্রন্ট-সেন্টার টার্নিং পয়েন্ট দ্বারা। ভিআর রোবটে কলমের অবস্থানও এখানেই।

VEXcode VR-এর ড্যাশবোর্ডে অবস্থান সেন্সরের মান দেখা যাবে।
ভিআর খেলার মাঠে অবস্থান সেন্সর এবং স্থানাঙ্ক
যেকোনো খেলার মাঠের স্থানাঙ্ক নেভিগেট করতে লোকেশন সেন্সর ব্যবহার করা যেতে পারে। X এবং Y অবস্থানের জন্য প্রতিটি খেলার মাঠ -১০০০ মিলিমিটার (মিমি) থেকে ১০০০ মিলিমিটার (মিমি) পর্যন্ত।

VEXcode VR ড্যাশবোর্ড অবস্থান সেন্সর থেকে নির্ধারিত VR রোবটের (X,Y) অবস্থান প্রদর্শন করে।
খেলার মাঠে কীভাবে (X,Y) স্থানাঙ্কগুলি সনাক্ত করতে হয় এবং কীভাবে একটি VR রোবটের বর্তমান অবস্থান এবং কোণের স্থানাঙ্কগুলি সনাক্ত করতে হয় সে সম্পর্কে তথ্যের জন্য নিম্নলিখিত নিবন্ধটি দেখুন৷
মনিটর কনসোল সম্পর্কে আরও তথ্যের জন্য, এই নিবন্ধটি দেখুন।
স্থানাঙ্ক সিস্টেম (X,Y) এবং অবস্থান কমান্ডগুলি কীভাবে ব্যবহার করবেন সে সম্পর্কে আরও তথ্যের জন্য, নিম্নলিখিত নিবন্ধটি দেখুন।
পজিশন কমান্ড
লোকেশন সেন্সরটি তার X, Y স্থানাঙ্কের উপর ভিত্তি করে একটি খেলার মাঠের একটি সুনির্দিষ্ট অবস্থানে বা থেকে VR রোবটকে নেভিগেট করতে ব্যবহার করা যেতে পারে। লোকেশন সেন্সর থেকে প্রাপ্ত ডেটা একটি প্রকল্পে ব্যবহার করা যেতে পারে যাতে ভিআর রোবট স্থানাঙ্ক সমতলে তার রিপোর্ট করা অবস্থানের উপর ভিত্তি করে সিদ্ধান্ত নিতে পারে।
লোকেশন সেন্সরের অবস্থান রিপোর্ট করতে একটি টেক্সট প্রজেক্টে পজিশন কমান্ড ব্যবহার করুন। position কমান্ডটি একটি সাংখ্যিক মান প্রদান করে যা অবস্থান সেন্সরের কেন্দ্রের (VR রোবটের কেন্দ্র) X বা Y স্থানাঙ্কের অবস্থান রিপোর্ট করে। X বা Y পরামিতি প্রবেশ করে X বা Y স্থানাঙ্কের অবস্থান রিপোর্ট করা হয়েছে কিনা তা চয়ন করুন।
location.position(X, MM)
location.position(Y, MM)পজিশন কমান্ডটি মিলিমিটার (মিমি) বা ইঞ্চিতেও মান রিপোর্ট করতে পারে।
location.position(X, MM)
location.position(X, INCHES)ইউনিট ৫-এ আলোচিত get_distance কমান্ডের মতো,position কমান্ডটি সাধারণত একটি নিয়ন্ত্রণ কাঠামোর সাথে ব্যবহৃত হয়, যেমন একটিwhile লুপ, সেইসাথে একটি তুলনামূলক অপারেটর, যাতে VR রোবট X এবং Y অক্ষ বরাবর একটি অবস্থানে নেভিগেট করার জন্য অবস্থান সেন্সর থেকে ডেটা ব্যবহার করতে পারে। এই ইউনিটে আপনিposition কমান্ডটি এইভাবে ব্যবহার করার বিষয়ে আরও শিখবেন।
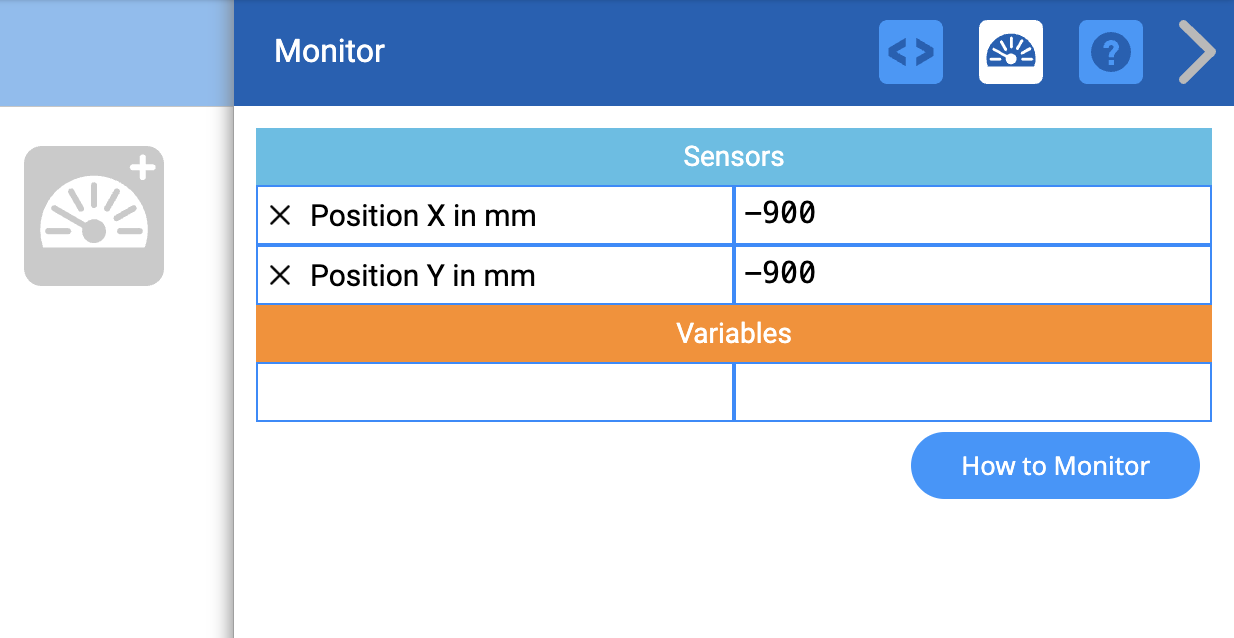
অবস্থান সেন্সর ডেটা দেখা হচ্ছে
আপনি VR ড্যাশবোর্ডে বা মনিটর কনসোলের মাধ্যমে অবস্থান সেন্সর দ্বারা রিপোর্ট করা ডেটা দেখতে পারেন। অবস্থান সেন্সর ডেটা কীভাবে রিপোর্ট করা হয় তা দেখতে "অবস্থান" উদাহরণ প্রকল্প লোড করুন এবং চালান, যাতে আপনি একটি নির্দিষ্ট স্থানে VR রোবট নেভিগেট করতে একটি প্রকল্পে এটি ব্যবহার করতে পারেন৷
আপনার তথ্যের জন্য
অবস্থান সেন্সরটি ডিগ্রীতে ভিআর রোবটের অবস্থানের কোণ রিপোর্ট করতেও ব্যবহার করা যেতে পারে। একটি সুনির্দিষ্ট অবস্থানে ঘুরতে বা আপনার বর্তমান অবস্থান থেকে একটি সুনির্দিষ্ট পরিমাণ সরানোর চেষ্টা করার সময় এটি কার্যকর হতে পারে।
position_angleকমান্ডটি VR রোবটের অবস্থান কোণের সংখ্যাসূচক মান ডিগ্রিতে রিপোর্ট করতে ব্যবহার করা যেতে পারে।
অবস্থান.অবস্থান_কোণ(ডিগ্রি)'লোকেশন সেন্সিং' উদাহরণ প্রকল্পটিপজিশনএবংপজিশন_এঙ্গেলকমান্ড উভয় ব্যবহার করে লোকেশন সেন্সর দ্বারা রিপোর্ট করা মানগুলি ব্যবহার করে।
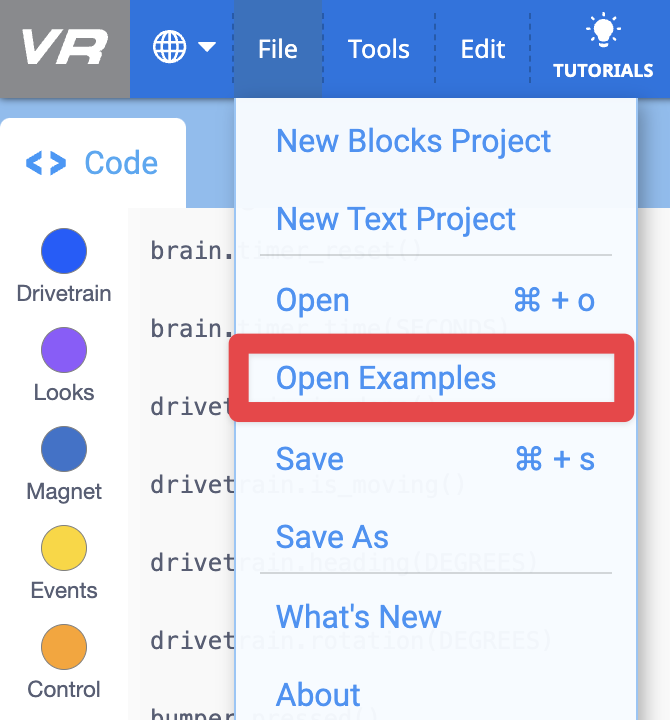
- VEXcode VR-এ, ফাইল ড্রপডাউন মেনু থেকে "উন্মুক্ত উদাহরণ" নির্বাচন করুন।
- "অবস্থান" উদাহরণ প্রকল্পটি নির্বাচন করুন।
- যদি খেলার মাঠের উইন্ডোটি ইতিমধ্যে খোলা না থাকে তবে তা খুলুন। নিশ্চিত করুন যে নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ডখোলে, এবং প্রকল্পটি চালান। এই প্রকল্পটি এখানেও দেখানো হয়েছে।
# "main"-এ প্রজেক্ট কোড যোগ করুন
def main():
# রোবটটি Y অক্ষে 0 অতিক্রম না করা পর্যন্ত গাড়ি চালাবে
while location.position(Y, MM) < 0:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 90, DEGREES)
# রোবটটি X অক্ষে 0 অতিক্রম না করা পর্যন্ত গাড়ি চালাবে
while location.position(X, MM) < 0:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()
# VR থ্রেড —
vr_thread(main) মুছে ফেলবেন না- লক্ষ্য করুন যে VR রোবট Y স্থানাঙ্ক শূন্যের চেয়ে বড় না হওয়া পর্যন্ত ড্রাইভ করে, ডানদিকে মোড় নেয়, তারপর X স্থানাঙ্কটি শূন্যের চেয়ে বড় না হওয়া পর্যন্ত ড্রাইভ করে। এটি ভিআর রোবটটিকে নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ডের কেন্দ্রের কাছাকাছি, অবস্থানের কাছাকাছি (0, 0) রাখে।