
Lição 1: O que é o sensor de localização?
Nesta lição, você aprenderá o que é o Sensor de Localização e como usar o Sensor de Localização para navegar no Robô VR no plano de coordenadas no Playground do Mapa de Grade Numérica. Você aprenderá como o Sensor de Localização funciona e como usar o Sensor de Localização em um projeto VEXcode VR Python.
Resultados de Aprendizagem
- Identifique se o Sensor de Localização lê as coordenadas (X,Y) a partir do ponto de giro central de um Robô VR.
- Identifique que o comando da posição informa a posição das coordenadas X ou Y de um robô VR em milímetros ou polegadas.
- Descreva por que o Sensor de Localização seria usado num projeto.
Sensor de Localização
Um Robô VR possui um Sensor de Localização integrado que informa a posição (X,Y) do Robô VR. A localização do Robô VR é determinada pelo ponto de viragem do centro frontal. Esta também é a localização da Caneta no Robô VR.

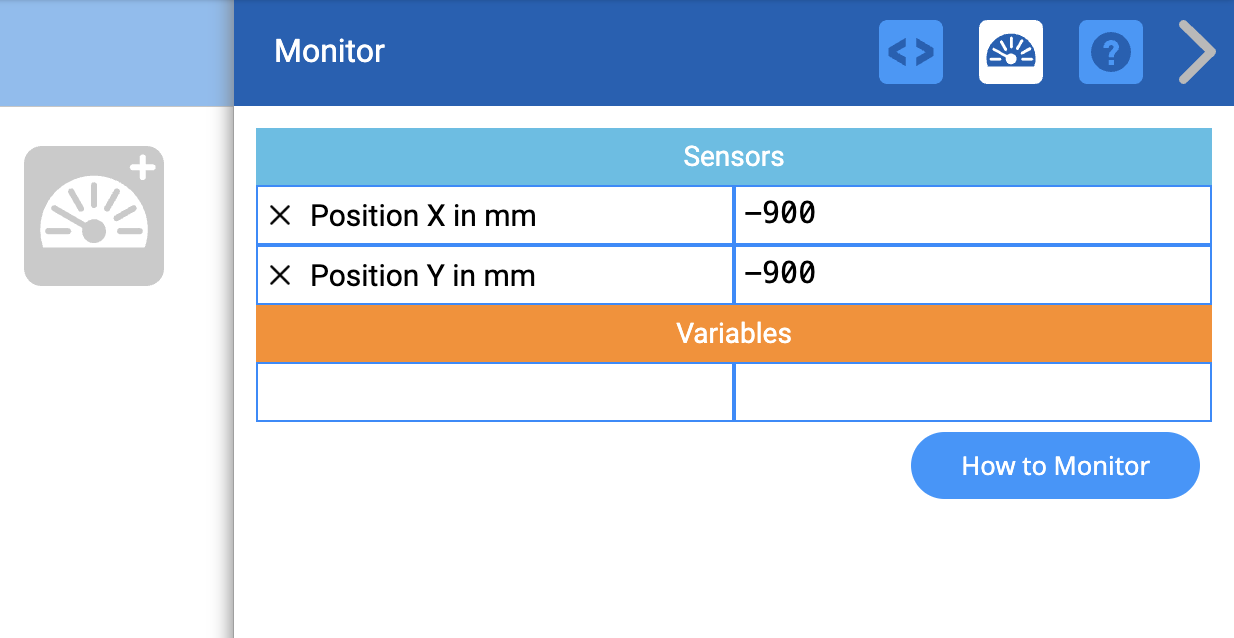
Os valores do Sensor de Localização podem ser vistos no Painel no VEXcode VR.
Sensor de localização e coordenadas em playgrounds de RV
O Sensor de Localização pode ser usado para navegar pelas coordenadas de qualquer Playground. Cada Playground varia de -1000 milímetros (mm) a 1000 milímetros (mm) para as posições X e Y.

O Painel VEXcode VR exibe a posição (X,Y) de um Robô VR determinada a partir do Sensor de Localização.
Veja o artigo a seguir para obter informações sobre como identificar as coordenadas (X,Y) em um playground e como identificar as coordenadas da localização e do ângulo atuais de um robô de RV.
Para obter mais informações sobre o Console do Monitor, consulte este artigo.
Para obter mais informações sobre como usar o sistema de coordenadas (X,Y) e os comandos de posição, consulte o artigo a seguir.
Comando de Posição
O Sensor de Localização pode ser usado para navegar o Robô VR de ou para uma localização precisa num Playground, com base nas suas coordenadas X, Y. Os dados do Sensor de Localização podem ser usados em um projeto para que o Robô VR possa tomar uma decisão com base na sua posição relatada no plano de coordenadas.
Utilize o comando position num projeto de texto para comunicar a posição do sensor de localização. O comando position devolve um valor numérico que informa a posição da coordenada X ou Y do centro do Sensor de Localização (o centro do Robot VR). Escolha se a posição da coordenada X ou Y é relatada inserindo o parâmetro X ou Y.
location.position(X, MM)
location.position(Y, MM)O comando posição também pode reportar valores em milímetros (mm) ou polegadas.
location.position(X, MM)
location.position(X, POLEGADAS)Tal como o comando get_distance discutido na Unidade 5, o comando position é normalmente utilizado com uma estrutura de controlo, como um ciclo while , bem como um operador de comparação, para que o VR O robô pode utilizar os dados do sensor de localização para navegar ao longo dos eixos X e Y até um local. Irá aprender mais sobre como utilizar o comando position desta forma nesta unidade.
Visualizar dados do sensor de localização
Você pode visualizar os dados relatados pelo Sensor de Localização no Painel de RV ou através do Console do Monitor. Carregue e execute o projeto de exemplo "Localização" para ver como os dados do Sensor de Localização são relatados, para que você possa usá-los em um projeto para navegar o Robô de RV para um local específico.
Para sua informação
O Sensor de Localização também pode ser usado para relatar o ângulo da posição do Robô VR em graus. Isso pode ser útil ao tentar virar para um local preciso ou mover da sua posição atual uma quantidade precisa.
O comando position_angle pode ser utilizado para reportar o valor numérico do ângulo de posição do robô VR em graus.
location.position_angle(GRAUS)O projeto de exemplo 'Deteção de localização' utiliza os valores reportados pelo sensor de localização utilizando os comandos position e position_angle .
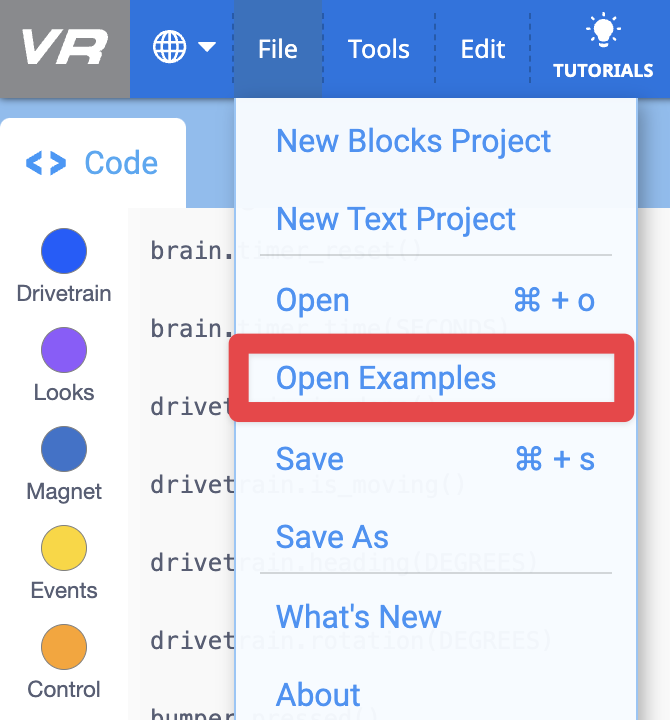
- No VEXcode VR, selecione "Abrir Exemplos" no menu suspenso Ficheiro.
- Seleccione o projecto de exemplo "Localização".
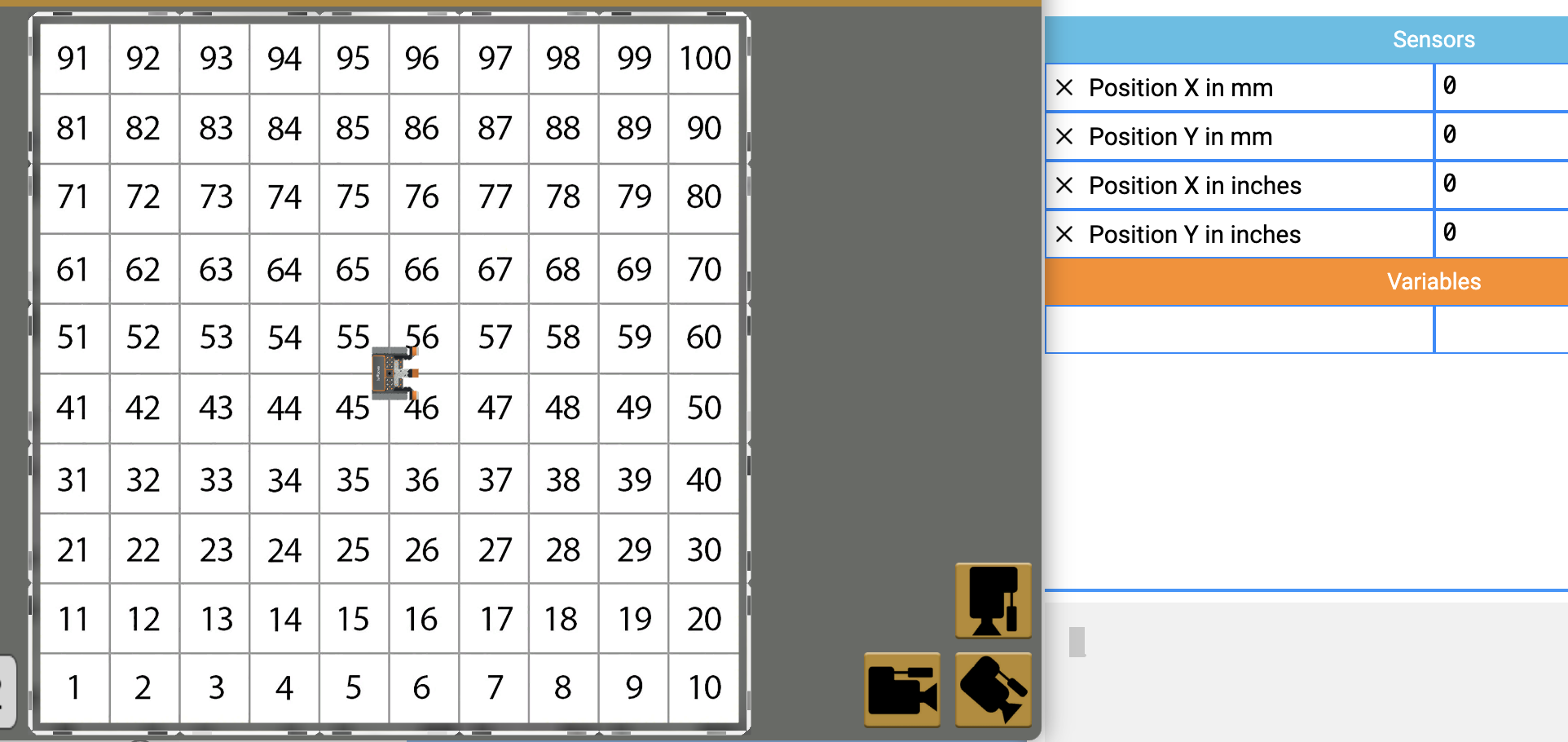
- Abra a janela do playground se ainda não estiver aberta. Certifique-se de que o Playground do Mapa de Grade Numérica seja aberto e execute o projeto. Este projeto também é mostrado aqui.
# Adicione o código do projeto em "main"
def main():
# O robô vai dirigir até passar de 0 no eixo Y
enquanto location.position (Y, MM) < 0
: drivetrain.drive (FORWARD)
wait(5, MSEC
) drivetrain.turn_for (RIGHT, 90, DEGREES)
# O robô vai dirigir até passar de 0 no eixo X
enquanto location.position (X, MM) < 0
: drivetrain.drive (FORWARD)
wait(5, MSEC
) drivetrain.stop ()
# VR threads — Não exclua
vr_thread(main)- Observe que o robô VR aciona até que a coordenada Y seja maior que zero, vira à direita e, em seguida, aciona até que a coordenada X seja maior que zero. Isso coloca o Robô VR perto do centro do Playground do Mapa de Grade Numérica, perto da localização (0, 0).
Perguntas
Selecione uma ligação abaixo para aceder ao questionário da aula.
Google Doc / .docx / .pdf