पाठ 1: स्थान सेंसर क्या है?
इस पाठ में, आप सीखेंगे कि स्थान सेंसर क्या है और नंबर ग्रिड मैप प्लेग्राउंडपर समन्वय विमान पर वीआर रोबोट को नेविगेट करने के लिए स्थान सेंसर का उपयोग कैसे करें। आप सीखेंगे कि लोकेशन सेंसर कैसे काम करता है और VEXcode VR पायथन प्रोजेक्ट में लोकेशन सेंसर का उपयोग कैसे करें।
सीखने के परिणाम
- पहचानें कि स्थान सेंसर VR रोबोट के केंद्र मोड़ बिंदु से (X,Y) निर्देशांक पढ़ता है।
- पहचानें कि स्थितिकमांड वीआर रोबोट की एक्स या वाई निर्देशांक स्थिति को मिलीमीटर या इंच में रिपोर्ट करता है।
- वर्णन करें कि किसी परियोजना में स्थान सेंसर का उपयोग क्यों किया जाएगा।
स्थान सेंसर
वीआर रोबोट में एक स्थान सेंसर लगा होता है जो वीआर रोबोट की (X,Y) स्थिति की रिपोर्ट करता है। वी.आर. रोबोट का स्थान सामने के मध्य मोड़ बिंदु द्वारा निर्धारित किया जाता है। यह वी.आर. रोबोट पर पेन का स्थान भी है।

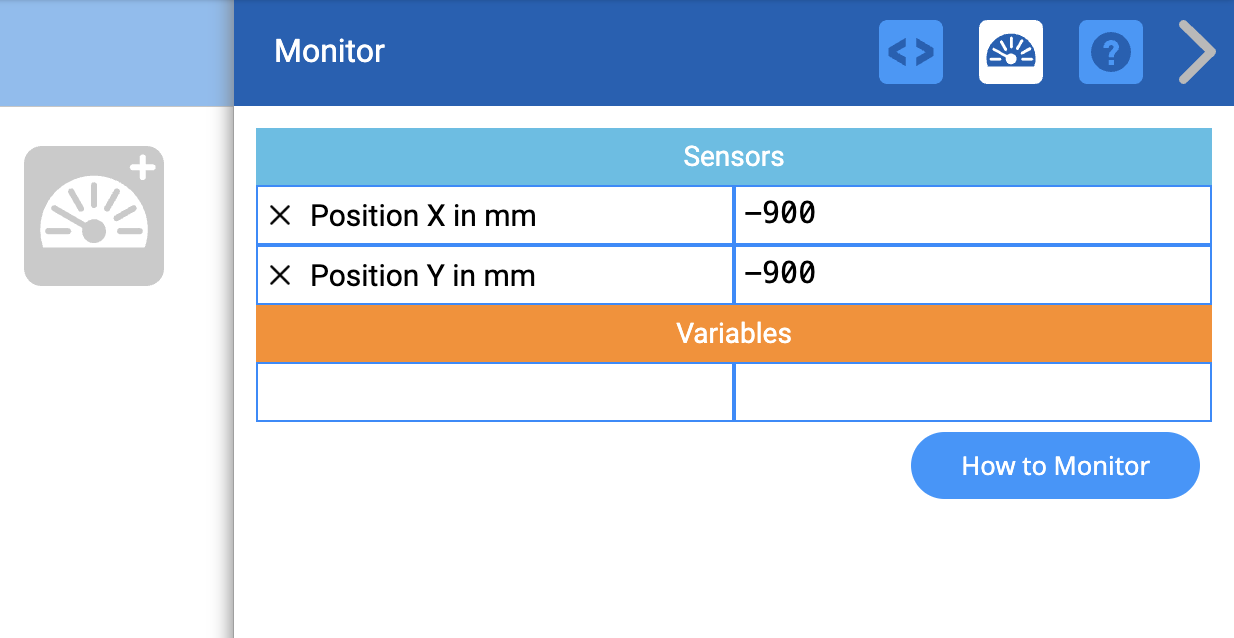
स्थान सेंसर मान VEXcode VR में डैशबोर्ड पर देखे जा सकते हैं।
VR खेल के मैदानों में स्थान सेंसर और निर्देशांक
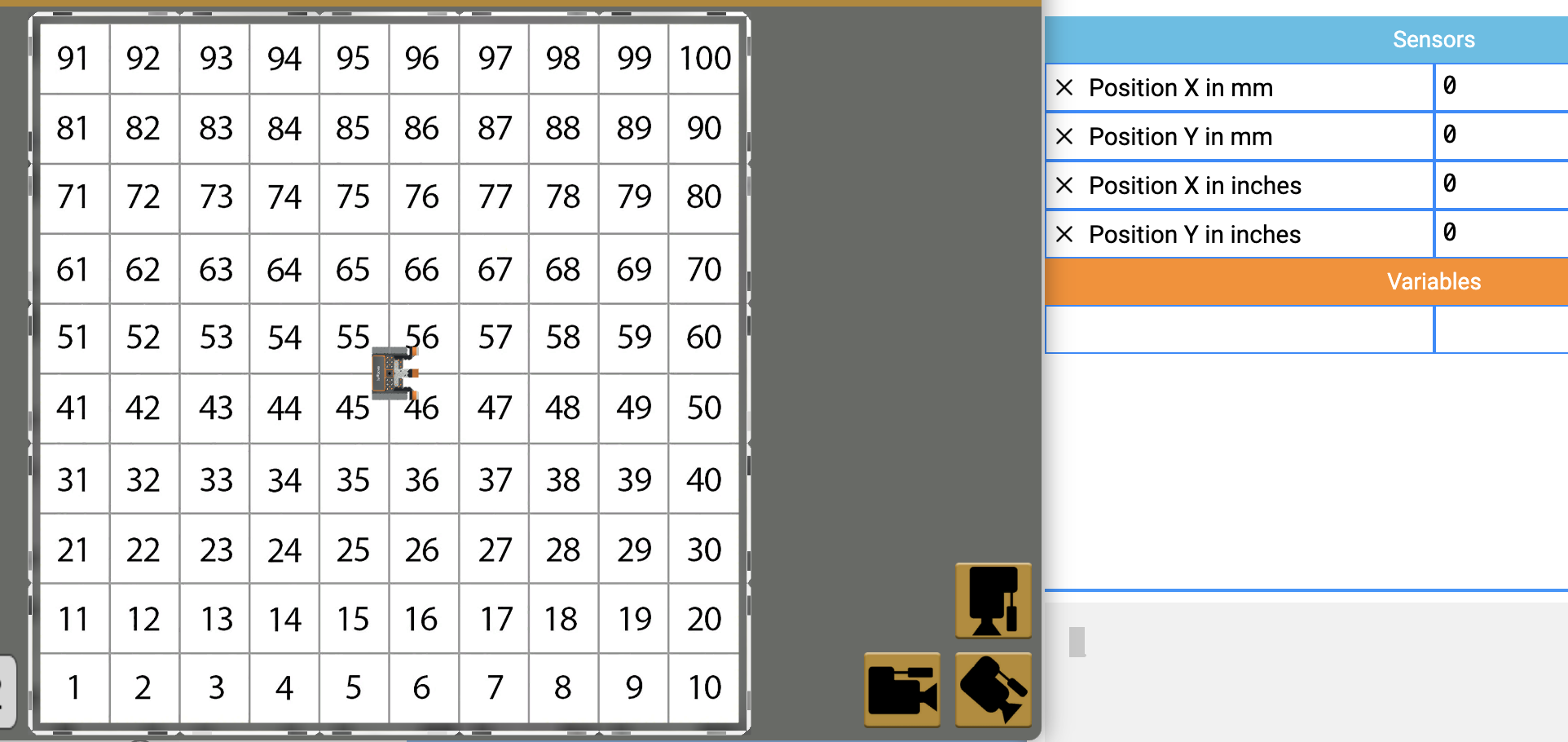
स्थान सेंसर का उपयोग किसी भी खेल के मैदान के निर्देशांक को नेविगेट करने के लिए किया जा सकता है। प्रत्येक खेल का मैदान X और Y स्थिति के लिए -1000 मिलीमीटर (मिमी) से 1000 मिलीमीटर (मिमी) तक होता है।

VEXcode VR डैशबोर्ड, लोकेशन सेंसर से निर्धारित VR रोबोट की (X,Y) स्थिति प्रदर्शित करता है।
खेल के मैदान पर (X,Y) निर्देशांक की पहचान कैसे करें, तथा VR रोबोट के वर्तमान स्थान और कोण के निर्देशांक की पहचान कैसे करें, इसकी जानकारी के लिए निम्नलिखित लेख देखें।
मॉनिटर कंसोल के बारे में अधिक जानकारी के लिए यह आलेख देखें।
निर्देशांक प्रणाली (X,Y) और स्थिति आदेशों का उपयोग करने के तरीके के बारे में अधिक जानकारी के लिए, निम्नलिखित लेख देखें।
स्थिति कमान
स्थान संवेदक का उपयोग वीआर रोबोट को उसके X, Y निर्देशांक के आधार पर खेल के मैदान पर एक सटीक स्थान पर ले जाने या वहां से लाने के लिए किया जा सकता है। स्थान संवेदक से प्राप्त डेटा का उपयोग किसी परियोजना में किया जा सकता है, ताकि वीआर रोबोट निर्देशांक तल पर अपनी रिपोर्ट की गई स्थिति के आधार पर निर्णय ले सके।
स्थान सेंसर की स्थिति की रिपोर्ट करने के लिए टेक्स्ट प्रोजेक्ट में स्थिति कमांड का उपयोग करें। स्थिति कमांड एक संख्यात्मक मान लौटाता है जो स्थान सेंसर (वीआर रोबोट का केंद्र) के केंद्र की एक्स या वाई निर्देशांक स्थिति की रिपोर्ट करता है। X या Y पैरामीटर दर्ज करके चुनें कि X या Y निर्देशांक स्थिति की रिपोर्ट की जाए।
स्थान.स्थिति(X, MM)
स्थान.स्थिति(Y, MM)स्थिति कमांड मिलीमीटर (मिमी) या इंच में भी मान रिपोर्ट कर सकता है।
स्थान.स्थिति(X, MM)
स्थान.स्थिति(X, इंच)यूनिट 5 में चर्चा किए गए get_distance कमांड की तरह,position कमांड का उपयोग आमतौर पर एक नियंत्रण संरचना के साथ किया जाता है, जैसे किwhile लूप, साथ ही एक तुलना ऑपरेटर, ताकि VR रोबोट स्थान सेंसर से डेटा का उपयोग करके X और Y अक्षों के साथ किसी स्थान पर नेविगेट कर सके। इस इकाई में आपस्थिति कमांड का इस तरह से उपयोग करने के बारे में अधिक जानेंगे।
स्थान सेंसर डेटा देखना
आप VR डैशबोर्ड में या मॉनिटर कंसोल के माध्यम से लोकेशन सेंसर द्वारा रिपोर्ट किए गए डेटा को देख सकते हैं। स्थान सेंसर डेटा की रिपोर्ट कैसे की जाती है, यह देखने के लिए "स्थान" उदाहरण प्रोजेक्ट को लोड करें और चलाएं, ताकि आप इसे किसी विशिष्ट स्थान पर VR रोबोट को नेविगेट करने के लिए प्रोजेक्ट में उपयोग कर सकें।
आपकी जानकारी के लिए
लोकेशन सेंसर का उपयोग वीआर रोबोट की स्थिति के कोण को डिग्री में रिपोर्ट करने के लिए भी किया जा सकता है। यह तब उपयोगी हो सकता है जब आप किसी सटीक स्थान पर जाने का प्रयास कर रहे हों, या अपनी वर्तमान स्थिति से एक निश्चित दूरी तक आगे बढ़ना चाहते हों।
position_angleकमांड का उपयोग वीआर रोबोट के स्थिति कोण के संख्यात्मक मान को डिग्री में रिपोर्ट करने के लिए किया जा सकता है।
स्थान.स्थिति_कोण(डिग्री)'स्थान संवेदन' उदाहरण परियोजनास्थितिऔरस्थिति_कोणदोनों कमांडों का उपयोग करके स्थान संवेदक द्वारा रिपोर्ट किए गए मानों का उपयोग करती है।
- VEXcode VR में, फ़ाइल ड्रॉपडाउन मेनू से "ओपन उदाहरण" चुनें।
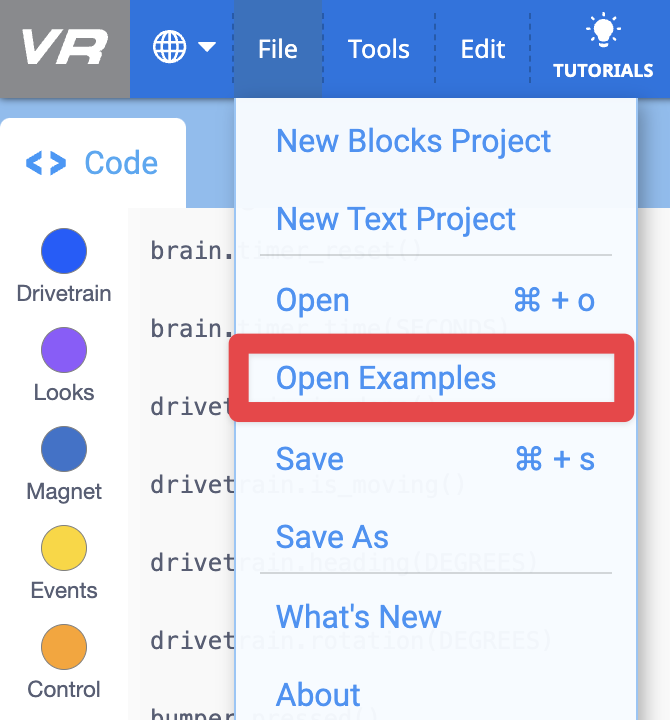
- “स्थान” उदाहरण प्रोजेक्ट का चयन करें.
- यदि प्लेग्राउंड विंडो पहले से खुली नहीं है तो उसे खोलें। सुनिश्चित करें कि नंबर ग्रिड मैप प्लेग्राउंडखुलता है, और प्रोजेक्ट चलाएं। यह परियोजना भी यहां दर्शाई गई है।
# "main" में प्रोजेक्ट कोड जोड़ें
def main():
# रोबोट तब तक ड्राइव करेगा जब तक वह Y अक्ष पर 0 से आगे नहीं निकल जाता
while location.position(Y, MM) < 0:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 90, DEGREES)
# रोबोट तब तक ड्राइव करेगा जब तक वह X अक्ष पर 0 से आगे नहीं निकल जाता
while location.position(X, MM) < 0:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()
# VR थ्रेड्स — डिलीट न करें
vr_thread(main)- ध्यान दें कि वीआर रोबोट तब तक चलता है जब तक कि Y निर्देशांक शून्य से अधिक न हो जाए, फिर दाईं ओर मुड़ता है, फिर तब तक चलता है जब तक कि X निर्देशांक शून्य से अधिक न हो जाए। यह वीआर रोबोट को नंबर ग्रिड मैप प्लेग्राउंड के केंद्र के करीब, स्थान (0, 0) के पास रखता है।