Bài 1: Cảm biến vị trí là gì?
Trong Bài học này, bạn sẽ tìm hiểu Cảm biến vị trí là gì và cách sử dụng Cảm biến vị trí để điều hướng Robot VR trên mặt phẳng tọa độ trên Sân chơi bản đồ lưới số . Bạn sẽ tìm hiểu cách thức hoạt động của Cảm biến vị trí và cách sử dụng Cảm biến vị trí trong dự án Python VEXcode VR.
Kết quả học tập
- Xác định rằng Cảm biến vị trí đọc tọa độ (X,Y) từ điểm ngoặt trung tâm của Robot VR.
- Xác định lệnh vị trí báo cáo vị trí tọa độ X hoặc Y của Robot VR theo milimét hoặc inch.
- Mô tả lý do tại sao Cảm biến vị trí được sử dụng trong một dự án.
Cảm biến vị trí
Robot VR có cảm biến vị trí tích hợp để báo cáo vị trí (X,Y) của Robot VR. Vị trí của Robot VR được xác định bằng điểm ngoặt ở trung tâm phía trước. Đây cũng là vị trí của Bút trên Robot VR.

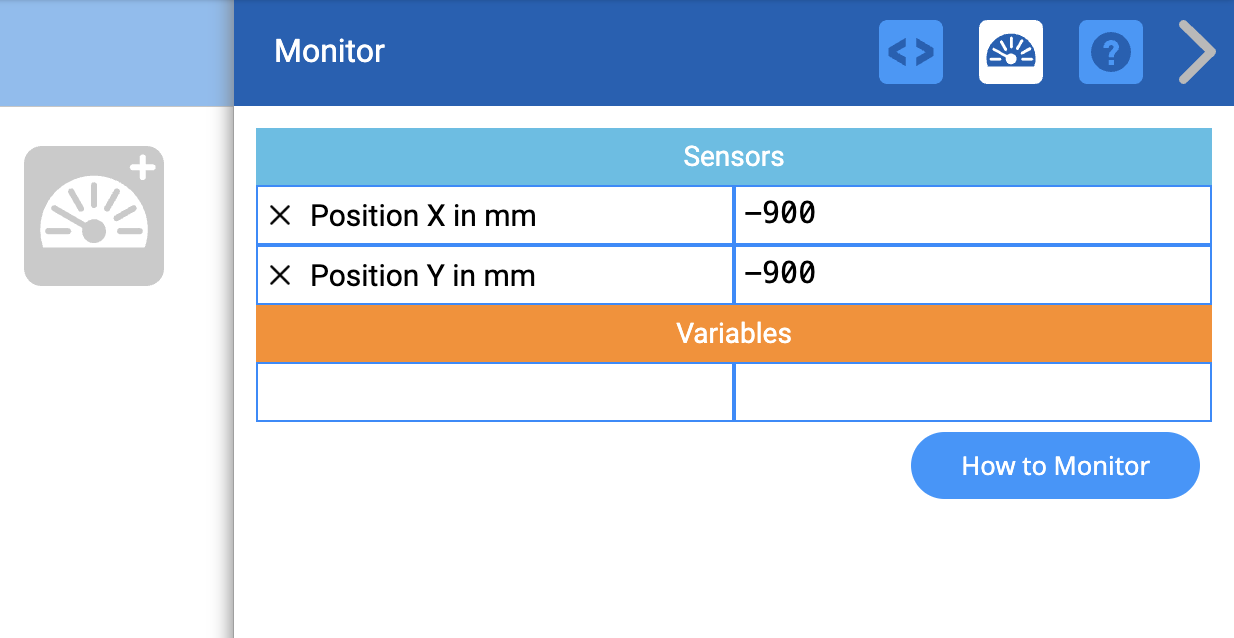
Giá trị cảm biến vị trí có thể được xem trên Bảng điều khiển trong VEXcode VR.
Cảm biến vị trí và tọa độ trong sân chơi VR
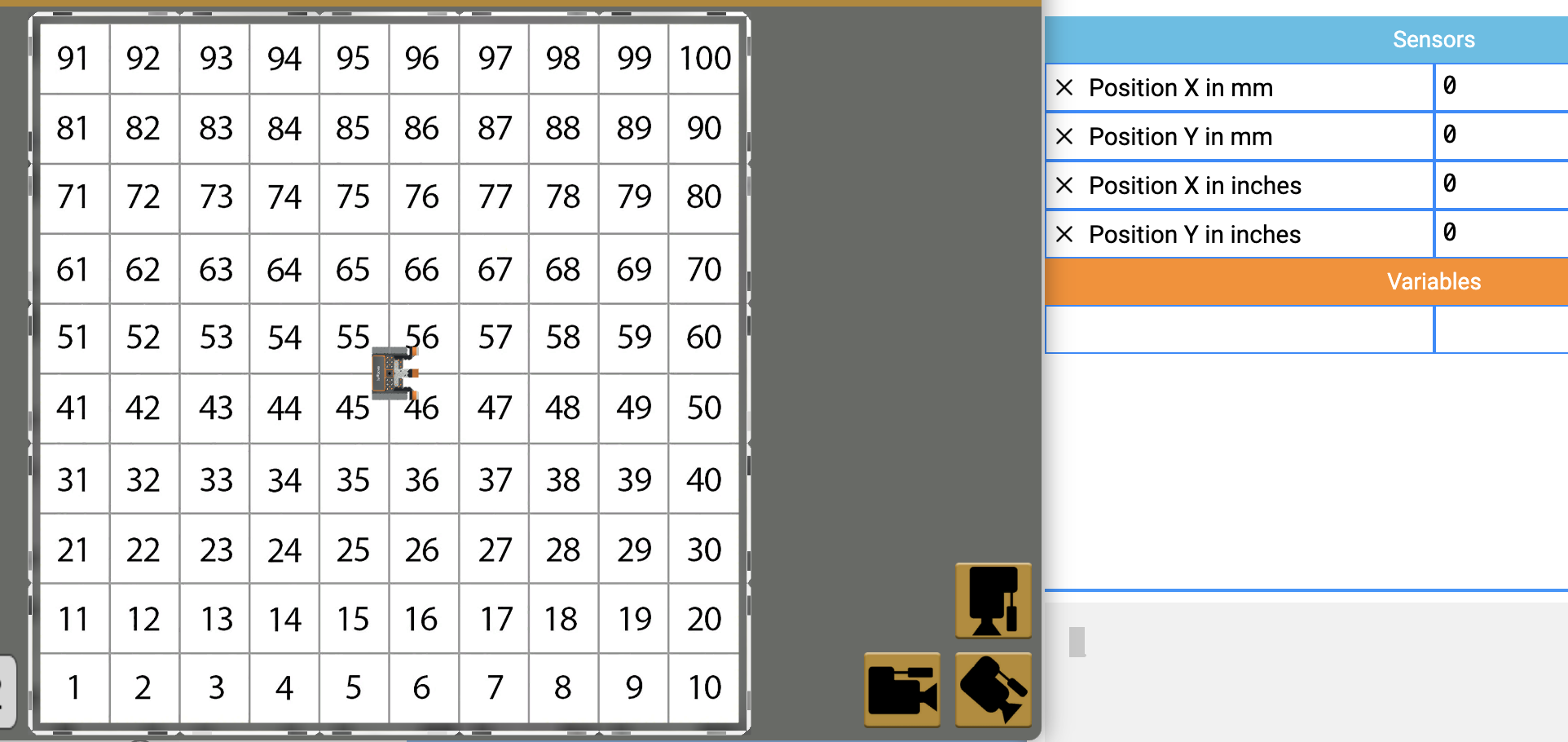
Cảm biến vị trí có thể được sử dụng để xác định tọa độ của bất kỳ Sân chơi nào. Mỗi Sân chơi có phạm vi từ -1000 milimét (mm) đến 1000 milimét (mm) cho vị trí X và Y.

Bảng điều khiển VR VEXcode hiển thị vị trí (X,Y) của Robot VR được xác định từ Cảm biến vị trí.
Xem bài viết sau để biết thông tin về cách Xác định tọa độ (X, Y) trên Sân chơi và cách xác định tọa độ vị trí và góc hiện tại của Robot VR.
Để biết thêm thông tin về Monitor Console, hãy xem bài viết này.
Để biết thêm thông tin về cách sử dụng hệ tọa độ (X, Y) và lệnh vị trí, hãy xem bài viết sau.
Lệnh vị trí
Cảm biến vị trí có thể được sử dụng để điều hướng Robot VR đến hoặc đi từ một vị trí chính xác trên Sân chơi, dựa trên tọa độ X, Y của nó. Dữ liệu từ Cảm biến vị trí có thể được sử dụng trong một dự án để Robot VR có thể đưa ra quyết định dựa trên vị trí được báo cáo trên mặt phẳng tọa độ.
Sử dụng lệnh vị trí trong dự án Văn bản để báo cáo vị trí của Cảm biến vị trí. Lệnh position trả về giá trị số báo cáo vị trí tọa độ X hoặc Y của tâm Cảm biến vị trí (tâm của Robot VR). Chọn xem vị trí tọa độ X hoặc Y có được báo cáo hay không bằng cách nhập tham số X hoặc Y.
vị trí.vị trí(X, MM)
vị trí.vị trí(Y, MM)Lệnh vị trí cũng có thể báo cáo các giá trị tính bằng milimét (mm) hoặc inch.
vị trí.vị trí(X, MM)
vị trí.vị trí(X, INCH)Giống như lệnh get_distance được thảo luận trong Đơn vị 5, lệnhvị trí thường được sử dụng với cấu trúc điều khiển, như vòng lặpwhile , cũng như toán tử so sánh, để Robot VR có thể sử dụng dữ liệu từ Cảm biến vị trí để điều hướng dọc theo trục X và Y đến một vị trí. Bạn sẽ tìm hiểu thêm về cách sử dụng lệnh vị trí theo cách này trong Đơn vị này.
Xem dữ liệu cảm biến vị trí
Bạn có thể xem dữ liệu được Cảm biến vị trí báo cáo trong Bảng điều khiển VR hoặc thông qua Bảng điều khiển màn hình. Tải và chạy dự án ví dụ “Vị trí” để xem dữ liệu Cảm biến vị trí được báo cáo như thế nào, để bạn có thể sử dụng trong dự án để điều hướng Robot VR đến một vị trí cụ thể.
Để bạn biết
Cảm biến vị trí cũng có thể được sử dụng để báo cáo góc vị trí của Robot VR theo độ. Điều này có thể hữu ích khi bạn muốn quay đến một vị trí chính xác hoặc di chuyển một khoảng cách chính xác khỏi vị trí hiện tại.
Lệnhposition_anglecó thể được sử dụng để báo cáo giá trị số của góc vị trí của Robot VR tính theo độ.
vị trí.vị trí_góc(độ)Dự án ví dụ 'Cảm biến vị trí' sử dụng các giá trị do Cảm biến vị trí báo cáo bằng cách sử dụng cả lệnhpositionvàposition_angle.
- Trong VEXcode VR, chọn “Mở ví dụ” từ menu thả xuống Tệp.
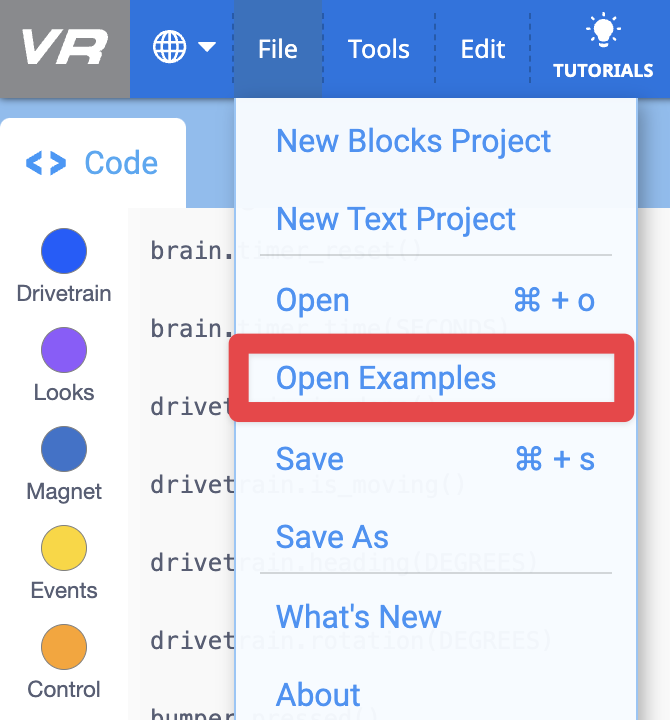
- Chọn dự án ví dụ “Vị trí”.
- Mở Cửa sổ Sân chơi nếu nó chưa mở. Đảm bảo rằng Sân chơi bản đồ lưới số mở ra và chạy dự án. Dự án này cũng được trình bày ở đây.
# Thêm mã dự án vào "main"
def main():
# Robot sẽ lái cho đến khi vượt qua số 0 trên trục Y
while location.position(Y, MM) < 0:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 90, DEGREES)
# Robot sẽ lái cho đến khi vượt qua số 0 trên trục X
while location.position(X, MM) < 0:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()
# Luồng VR — Không xóa
vr_thread(main)- Lưu ý rằng Robot VR sẽ di chuyển cho đến khi tọa độ Y lớn hơn 0, rẽ phải, sau đó di chuyển cho đến khi tọa độ X lớn hơn 0. Điều này đặt Robot VR gần trung tâm của Sân chơi bản đồ lưới số, gần vị trí (0, 0).