Lezione 1: Cos'è il sensore di posizione?
In questa lezione, imparerai cos'è il sensore di posizione e come utilizzare il sensore di posizione per navigare nel robot VR sul piano delle coordinate nel parco giochi della mappa della griglia numerica. Imparerai come funziona il sensore di posizione e come utilizzarlo in un progetto Python VEXcode VR.
Risultati di apprendimento
- Identificare che il sensore di posizione legga le coordinate (X,Y) dal punto di svolta centrale di un robot VR.
- Si noti che il comando posizione riporta la posizione delle coordinate X o Y di un robot VR in millimetri o pollici.
- Descrivere il motivo per cui il sensore di posizione verrebbe utilizzato in un progetto.
Sensore di posizione
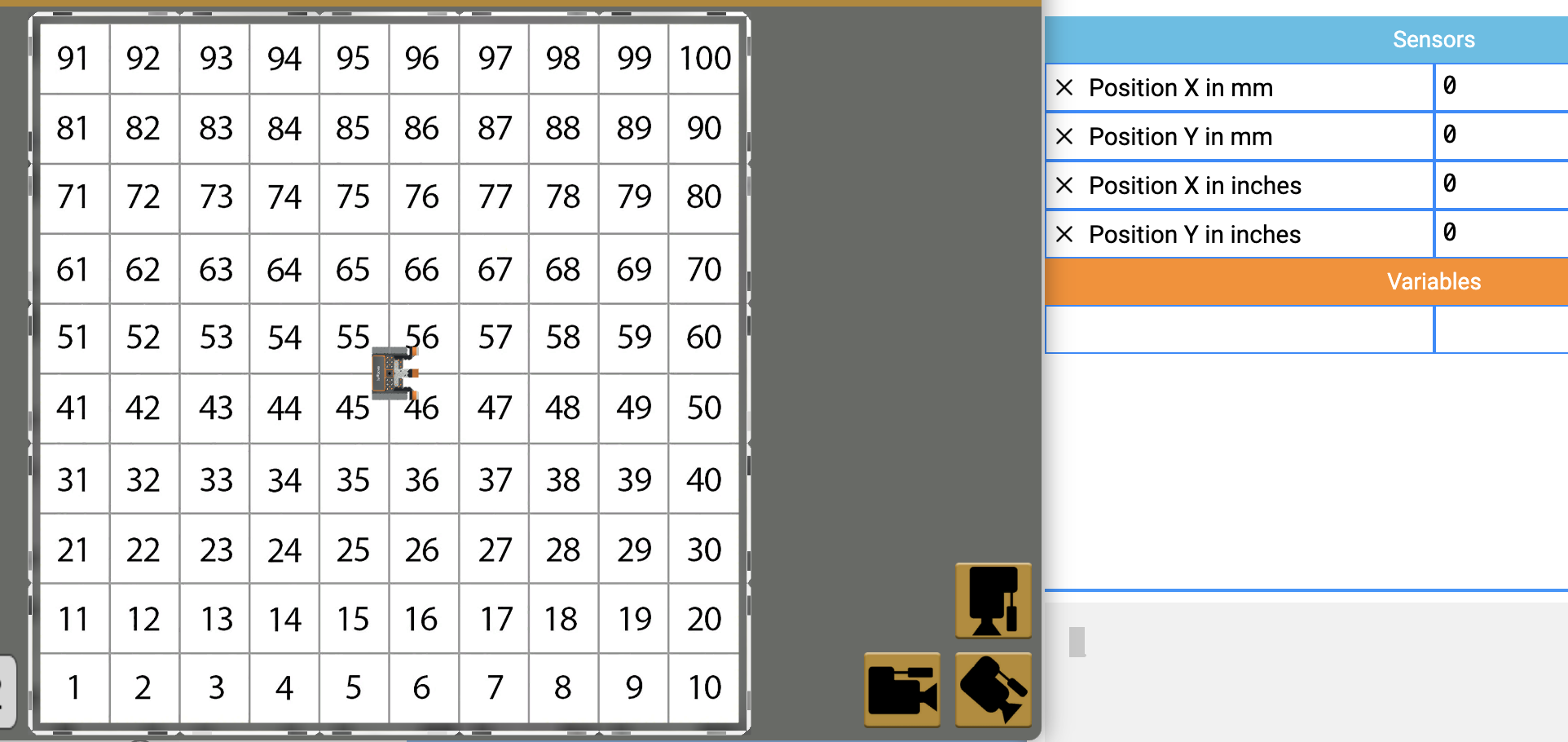
Un robot VR ha un sensore di posizione integrato che segnala la posizione (X,Y) del robot VR. La posizione del robot VR è determinata dal punto di svolta anteriore centrale. Questa è anche la posizione della penna sul robot VR.

I valori del sensore di posizione possono essere visualizzati sul cruscotto in VEXcode VR.
Sensore di posizione e coordinate nei parchi giochi VR
Il sensore di posizione può essere utilizzato per spostarsi tra le coordinate di qualsiasi parco giochi. Ogni parco giochi varia da -1000 millimetri (mm) a 1000 millimetri (mm) per le posizioni X e Y.

Il cruscotto VEXcode VR visualizza la posizione (X,Y) di un robot VR determinata dal sensore di posizione.
Consulta il seguente articolo per informazioni su come identificare le coordinate (X,Y) su un parco giochi e su come identificare le coordinate della posizione e dell'angolo attuali di un robot VR.
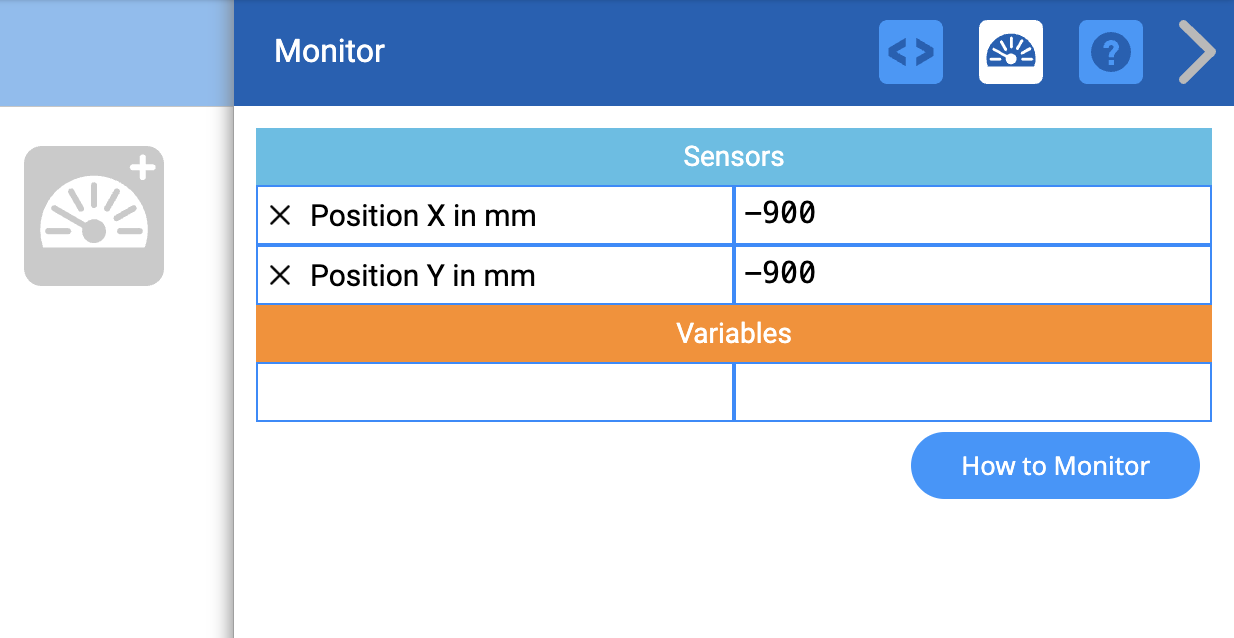
Per ulteriori informazioni sulla Console monitor, consulta questo articolo.
Per ulteriori informazioni su come utilizzare il sistema di coordinate (X,Y) e i comandi di posizione, consultare il seguente articolo.
Comando di posizione
Il sensore di posizione può essere utilizzato per navigare nel robot VR da o verso una posizione precisa su un parco giochi, in base alle sue coordinate X, Y. I dati del sensore di posizione possono essere utilizzati in un progetto in modo che il robot VR possa prendere una decisione in base alla sua posizione riportata sul piano delle coordinate.
Utilizzare il comando posizione in un progetto di testo per segnalare la posizione del sensore di posizione. Il comando posizione restituisce un valore numerico che riporta la posizione della coordinata X o Y del centro del sensore di posizione (il centro del robot VR). Scegliere se riportare la posizione della coordinata X o Y inserendo il parametro X o Y.
posizione.posizione(X, MM)
posizione.posizione(Y, MM)Il comando posizione può anche riportare valori in millimetri (mm) o pollici.
posizione.posizione(X, MM)
posizione.posizione(X, POLLICI)Come il comando get_distance trattato nell'Unità 5, il comando position viene in genere utilizzato con una struttura di controllo, come un ciclo while , nonché con un operatore di confronto, in modo che il robot VR possa utilizzare i dati provenienti dal sensore di posizione per navigare lungo gli assi X e Y verso una posizione. In questa Unità imparerai di più sull'uso del comando posizione in questo modo.
Visualizzazione dei dati del sensore di posizione
È possibile visualizzare i dati riportati dal sensore di posizione nella dashboard VR o tramite la console del monitor. Carica ed esegui il progetto di esempio "Posizione" per vedere come vengono riportati i dati del sensore di posizione, in modo da poterli utilizzare in un progetto per navigare nel robot VR in una posizione specifica.
Per tua informazione
Il sensore di posizione può anche essere utilizzato per segnalare l'angolo della posizione del robot VR in gradi. Questo può essere utile quando si cerca di passare a una posizione precisa o di spostare dalla posizione corrente una quantità precisa.
Il comando position_angle può essere utilizzato per segnalare il valore numerico dell'angolo di posizione del robot VR in gradi.
location.position_angle(GRADI)Il progetto di esempio "Rilevamento della posizione" utilizza i valori segnalati dal sensore di posizione tramite entrambi i comandi position e position_angle .
- In VEXcode VR, seleziona "Apri esempi" dal menu a discesa File.
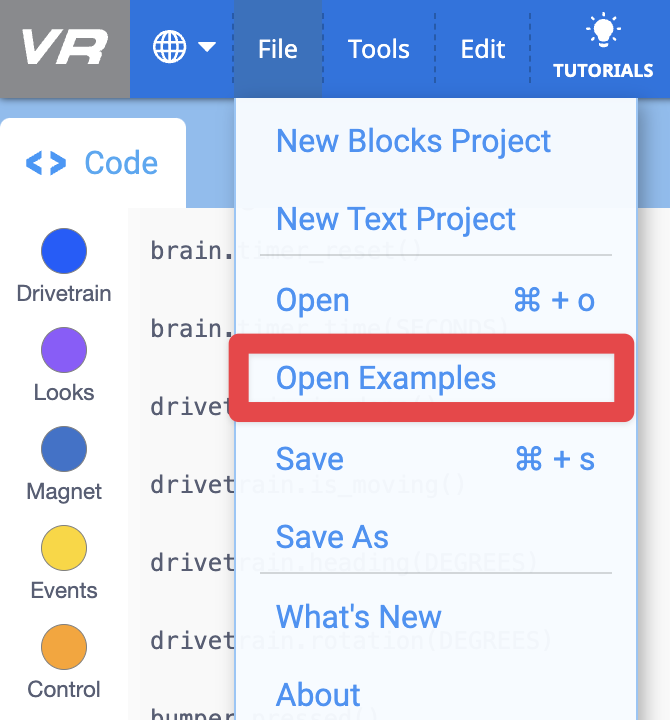
- Seleziona il progetto di esempio "Posizione".
- Aprire la finestra del parco giochi se non è già aperta. Assicurarsi che il Number Grid Map Playground si apra ed eseguire il progetto. Anche questo progetto è mostrato qui.
# Add project code in "main"
def main():
# The robot will drive until it passa 0 on the Y axis
while location.position (Y, MM) < 0:
drivetrain.drive (FORWARD)
wait(5, MSEC)
drivetrain.turn_for (RIGHT, 90, DEGREES)
# The robot will drive until it passa 0 on the X axis
while location.position (X, MM) < 0:
drivetrain.drive (FORWARD)
wait(5, MSEC)
drivetrain.stop ()
# VR threads — Do not delete
vr_thread(main)- Si noti che il Robot VR guida fino a quando la coordinata Y è maggiore di zero, gira a destra, quindi guida fino a quando la coordinata X è maggiore di zero. Questo posiziona il robot VR vicino al centro del parco giochi della mappa della griglia numerica, vicino alla posizione (0, 0).