
പാഠം 1: ലൊക്കേഷൻ സെൻസർ എന്താണ്?
ഈ പാഠത്തിൽ, ലൊക്കേഷൻ സെൻസർ എന്താണെന്നും നമ്പർ ഗ്രിഡ് മാപ്പ് പ്ലേഗ്രൗണ്ട്ലെ കോർഡിനേറ്റ് പ്ലെയിനിൽ VR റോബോട്ടിനെ നാവിഗേറ്റ് ചെയ്യാൻ ലൊക്കേഷൻ സെൻസർ എങ്ങനെ ഉപയോഗിക്കാമെന്നും നിങ്ങൾ പഠിക്കും. ഒരു VEXcode VR പൈത്തൺ പ്രോജക്റ്റിൽ ലൊക്കേഷൻ സെൻസർ എങ്ങനെ പ്രവർത്തിക്കുന്നുവെന്നും ലൊക്കേഷൻ സെൻസർ എങ്ങനെ ഉപയോഗിക്കാമെന്നും നിങ്ങൾ പഠിക്കും.
പഠന ഫലങ്ങൾ
- ഒരു VR റോബോട്ടിന്റെ മധ്യ ടേണിംഗ് പോയിന്റിൽ നിന്ന് ലൊക്കേഷൻ സെൻസർ (X,Y) കോർഡിനേറ്റുകൾ വായിക്കുന്നുണ്ടെന്ന് തിരിച്ചറിയുക.
- പൊസിഷൻകമാൻഡ് ഒരു VR റോബോട്ടിന്റെ X അല്ലെങ്കിൽ Y കോർഡിനേറ്റ് സ്ഥാനം മില്ലിമീറ്ററിലോ ഇഞ്ചിലോ റിപ്പോർട്ട് ചെയ്യുന്നുവെന്ന് തിരിച്ചറിയുക.
- ഒരു പ്രോജക്റ്റിൽ ലൊക്കേഷൻ സെൻസർ എന്തിനാണ് ഉപയോഗിക്കുന്നതെന്ന് വിവരിക്കുക.
ലൊക്കേഷൻ സെൻസർ
ഒരു VR റോബോട്ടിൽ ഒരു ലൊക്കേഷൻ സെൻസർ ഉണ്ട്, അത് VR റോബോട്ടിന്റെ (X,Y) സ്ഥാനം റിപ്പോർട്ട് ചെയ്യുന്നു. ഫ്രണ്ട്-സെന്റർ ടേണിംഗ് പോയിന്റാണ് വിആർ റോബോട്ടിന്റെ സ്ഥാനം നിർണ്ണയിക്കുന്നത്. വിആർ റോബോട്ടിലെ പേനയുടെ സ്ഥാനവും ഇതാണ്.

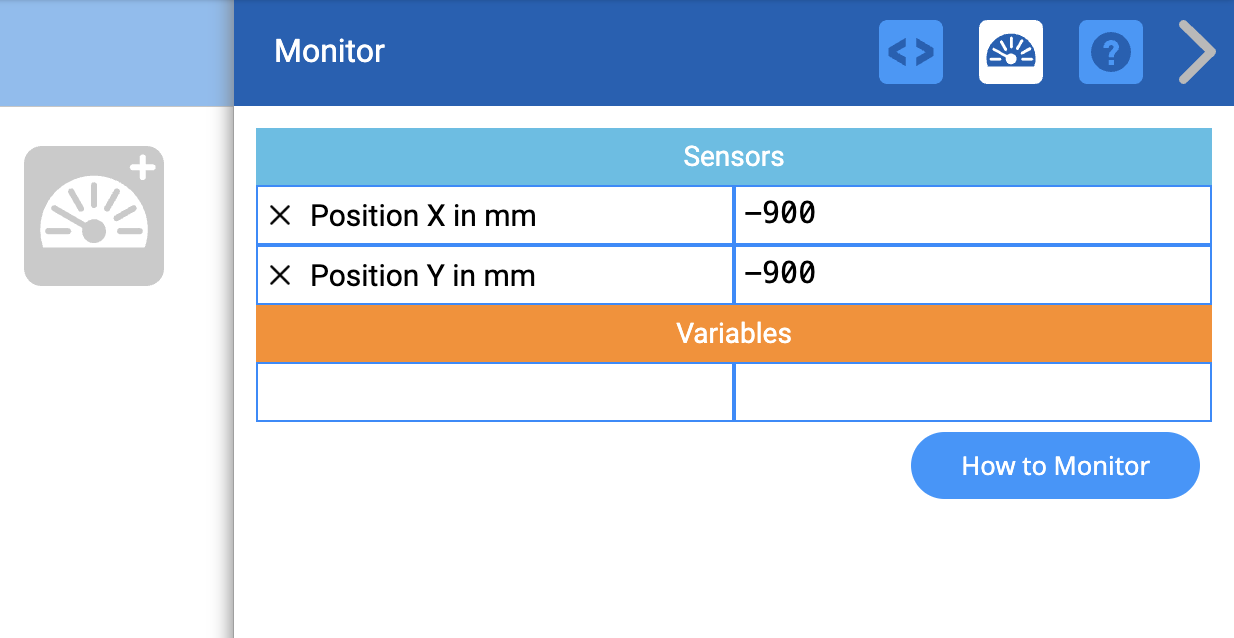
ലൊക്കേഷൻ സെൻസർ മൂല്യങ്ങൾ VEXcode VR-ൽ ഡാഷ്ബോർഡിൽ കാണാൻ കഴിയും.
VR കളിസ്ഥലങ്ങളിലെ ലൊക്കേഷൻ സെൻസറും കോർഡിനേറ്റുകളും
ഏതൊരു കളിസ്ഥലത്തിന്റെയും കോർഡിനേറ്റുകളിലൂടെ നാവിഗേറ്റ് ചെയ്യാൻ ലൊക്കേഷൻ സെൻസർ ഉപയോഗിക്കാം. X, Y സ്ഥാനങ്ങൾക്ക് ഓരോ കളിസ്ഥലവും -1000 മില്ലിമീറ്റർ (mm) മുതൽ 1000 മില്ലിമീറ്റർ (mm) വരെയാണ്.

ലൊക്കേഷൻ സെൻസറിൽ നിന്ന് നിർണ്ണയിക്കപ്പെട്ട ഒരു VR റോബോട്ടിന്റെ (X,Y) സ്ഥാനം VEXcode VR ഡാഷ്ബോർഡ് പ്രദർശിപ്പിക്കുന്നു.
ഒരു കളിസ്ഥലത്ത് (X,Y) കോർഡിനേറ്റുകൾ എങ്ങനെ തിരിച്ചറിയാം, ഒരു VR റോബോട്ടിന്റെ നിലവിലെ സ്ഥാനത്തിന്റെയും കോണിന്റെയും കോർഡിനേറ്റുകൾ എങ്ങനെ തിരിച്ചറിയാം എന്നിവയെക്കുറിച്ചുള്ള വിവരങ്ങൾക്ക് ഇനിപ്പറയുന്ന ലേഖനം കാണുക.
മോണിറ്റർ കൺസോളിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്, ഈ ലേഖനം കാണുക.
കോർഡിനേറ്റ് സിസ്റ്റം (X,Y), പൊസിഷൻ കമാൻഡുകൾ എന്നിവ എങ്ങനെ ഉപയോഗിക്കാം എന്നതിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്, ഇനിപ്പറയുന്ന ലേഖനം കാണുക.
പൊസിഷൻ കമാൻഡ്
X, Y കോർഡിനേറ്റുകളെ അടിസ്ഥാനമാക്കി, ഒരു കളിസ്ഥലത്തെ കൃത്യമായ സ്ഥലത്തേക്കോ അതിൽ നിന്നോ VR റോബോട്ടിനെ നാവിഗേറ്റ് ചെയ്യാൻ ലൊക്കേഷൻ സെൻസർ ഉപയോഗിക്കാം. ലൊക്കേഷൻ സെൻസറിൽ നിന്നുള്ള ഡാറ്റ ഒരു പ്രോജക്റ്റിൽ ഉപയോഗിക്കാൻ കഴിയും, അതുവഴി കോർഡിനേറ്റ് തലത്തിൽ റിപ്പോർട്ട് ചെയ്യപ്പെട്ട സ്ഥാനത്തെ അടിസ്ഥാനമാക്കി VR റോബോട്ടിന് തീരുമാനമെടുക്കാൻ കഴിയും.
ലൊക്കേഷൻ സെൻസറിന്റെ സ്ഥാനം റിപ്പോർട്ട് ചെയ്യുന്നതിന് ഒരു ടെക്സ്റ്റ് പ്രോജക്റ്റിൽ പൊസിഷൻ കമാൻഡ് ഉപയോഗിക്കുക. പൊസിഷൻ കമാൻഡ് ഒരു സംഖ്യാ മൂല്യം നൽകുന്നു, അത് ലൊക്കേഷൻ സെൻസറിന്റെ (VR റോബോട്ടിന്റെ മധ്യഭാഗം) മധ്യഭാഗത്തിന്റെ X അല്ലെങ്കിൽ Y കോർഡിനേറ്റ് സ്ഥാനം റിപ്പോർട്ട് ചെയ്യുന്നു. X അല്ലെങ്കിൽ Y പാരാമീറ്റർ നൽകി X അല്ലെങ്കിൽ Y കോർഡിനേറ്റ് സ്ഥാനം റിപ്പോർട്ട് ചെയ്യണോ എന്ന് തിരഞ്ഞെടുക്കുക.
സ്ഥലം.സ്ഥാനം(X, MM)
സ്ഥലം.സ്ഥാനം(Y, MM)പൊസിഷൻ കമാൻഡിന് മില്ലിമീറ്ററിലോ (മില്ലീമീറ്റർ) ഇഞ്ചിലോ മൂല്യങ്ങൾ റിപ്പോർട്ട് ചെയ്യാൻ കഴിയും.
സ്ഥലം.സ്ഥാനം(X, MM)
സ്ഥലം.സ്ഥാനം(X, ഇഞ്ച്)യൂണിറ്റ് 5-ൽ ചർച്ച ചെയ്ത get_distance കമാൻഡ് പോലെ,പൊസിഷൻ കമാൻഡ് സാധാരണയായിwhile ലൂപ്പ് പോലുള്ള ഒരു നിയന്ത്രണ ഘടനയും ഒരു താരതമ്യ ഓപ്പറേറ്ററും ഉപയോഗിച്ച് ഉപയോഗിക്കുന്നു, അതുവഴി VR റോബോട്ടിന് ലൊക്കേഷൻ സെൻസറിൽ നിന്നുള്ള ഡാറ്റ ഉപയോഗിച്ച് X, Y അക്ഷങ്ങളിലൂടെ ഒരു സ്ഥലത്തേക്ക് നാവിഗേറ്റ് ചെയ്യാൻ കഴിയും. ഈ യൂണിറ്റിൽപൊസിഷൻ കമാൻഡ് ഈ രീതിയിൽ ഉപയോഗിക്കുന്നതിനെക്കുറിച്ച് നിങ്ങൾക്ക് കൂടുതലറിയാം.
ലൊക്കേഷൻ സെൻസർ ഡാറ്റ കാണുക
ലൊക്കേഷൻ സെൻസർ റിപ്പോർട്ട് ചെയ്ത ഡാറ്റ നിങ്ങൾക്ക് VR ഡാഷ്ബോർഡിലോ മോണിറ്റർ കൺസോൾ വഴിയോ കാണാൻ കഴിയും. ലൊക്കേഷൻ സെൻസർ ഡാറ്റ എങ്ങനെയാണ് റിപ്പോർട്ട് ചെയ്യുന്നതെന്ന് കാണാൻ “ലൊക്കേഷൻ” ഉദാഹരണ പ്രോജക്റ്റ് ലോഡ് ചെയ്ത് പ്രവർത്തിപ്പിക്കുക, അതുവഴി VR റോബോട്ടിനെ ഒരു നിർദ്ദിഷ്ട സ്ഥലത്തേക്ക് നാവിഗേറ്റ് ചെയ്യുന്നതിന് നിങ്ങൾക്ക് അത് ഒരു പ്രോജക്റ്റിൽ ഉപയോഗിക്കാൻ കഴിയും.
നിങ്ങളുടെ അറിവിലേക്കായി
VR റോബോട്ടിന്റെ സ്ഥാനത്തിന്റെ കോൺ ഡിഗ്രിയിൽ റിപ്പോർട്ട് ചെയ്യുന്നതിനും ലൊക്കേഷൻ സെൻസർ ഉപയോഗിക്കാം. കൃത്യമായ ഒരു സ്ഥലത്തേക്ക് തിരിയാൻ ശ്രമിക്കുമ്പോഴോ നിങ്ങളുടെ നിലവിലെ സ്ഥാനത്ത് നിന്ന് കൃത്യമായ ഒരു തുക നീക്കാൻ ശ്രമിക്കുമ്പോഴോ ഇത് ഉപയോഗപ്രദമാകും.
VR റോബോട്ടിന്റെ പൊസിഷൻ ആംഗിളിന്റെ സംഖ്യാ മൂല്യം ഡിഗ്രിയിൽ റിപ്പോർട്ട് ചെയ്യാൻposition_angleകമാൻഡ് ഉപയോഗിക്കാം.
സ്ഥാനം.സ്ഥാനം_ആംഗിൾ(ഡിഗ്രികൾ)'ലൊക്കേഷൻ സെൻസിംഗ്' ഉദാഹരണ പ്രോജക്റ്റ്,പൊസിഷൻഉംപൊസിഷൻ_ആംഗിൾകമാൻഡുകളും ഉപയോഗിച്ച് ലൊക്കേഷൻ സെൻസർ റിപ്പോർട്ട് ചെയ്ത മൂല്യങ്ങൾ ഉപയോഗിക്കുന്നു.
- VEXcode VR-ൽ, ഫയൽ ഡ്രോപ്പ്ഡൗൺ മെനുവിൽ നിന്ന് "ഉദാഹരണങ്ങൾ തുറക്കുക" തിരഞ്ഞെടുക്കുക.
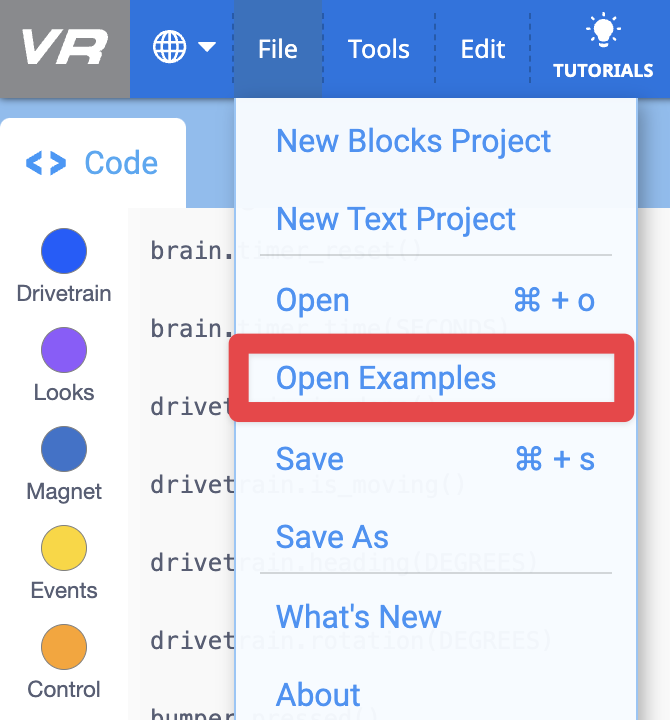
- "ലൊക്കേഷൻ" ഉദാഹരണ പ്രോജക്റ്റ് തിരഞ്ഞെടുക്കുക.
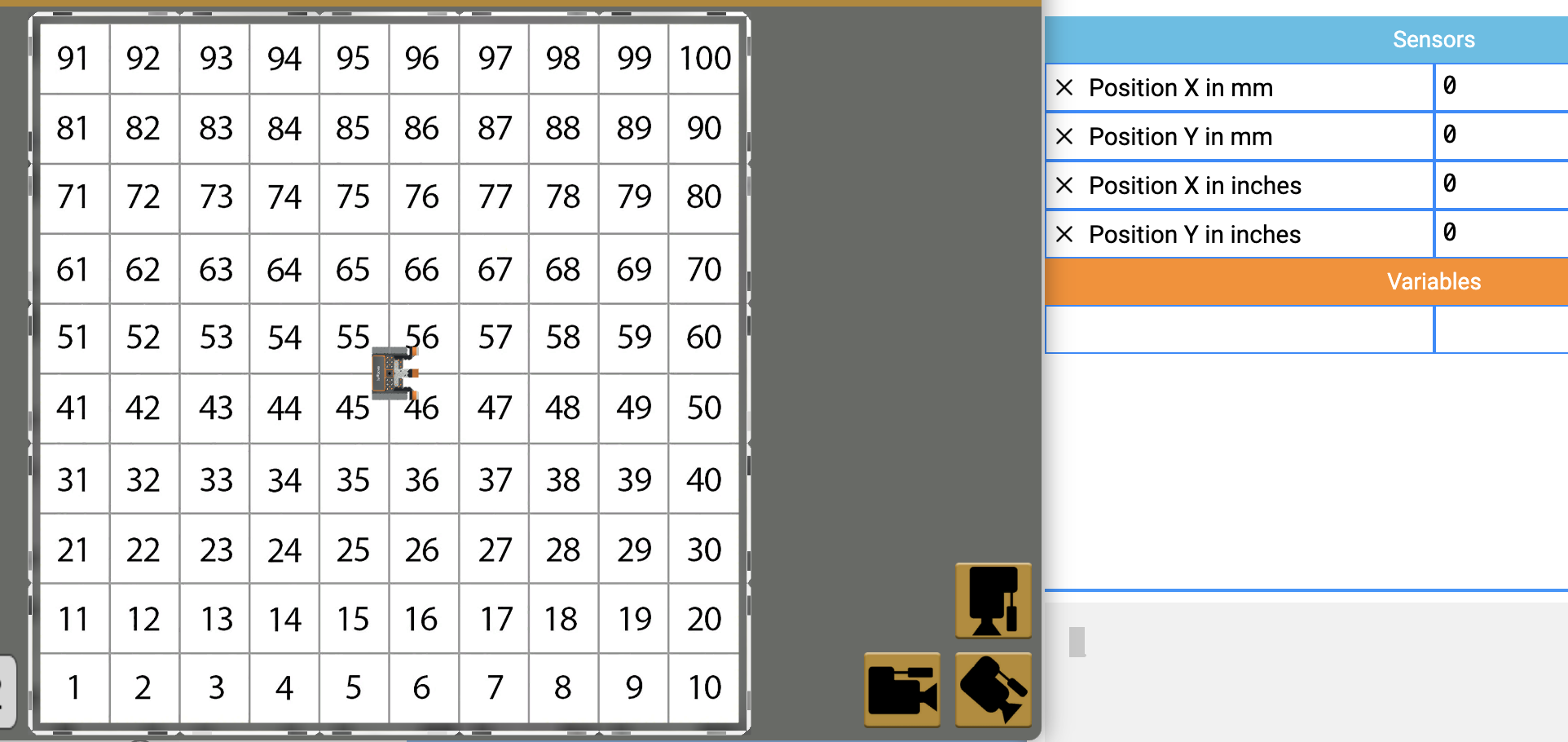
- പ്ലേഗ്രൗണ്ട് വിൻഡോ തുറന്നിട്ടില്ലെങ്കിൽ അത് തുറക്കുക. നമ്പർ ഗ്രിഡ് മാപ്പ് പ്ലേഗ്രൗണ്ട്തുറക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കുക, തുടർന്ന് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക. ഈ പദ്ധതിയും ഇവിടെ കാണിച്ചിരിക്കുന്നു.
# "main"
def main():
എന്നതിൽ പ്രോജക്റ്റ് കോഡ് ചേർക്കുക # location.position(Y, MM) < 0:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 90, DEGREES)
# X axis
ൽ 0 കടന്നുപോകുന്നതുവരെ റോബോട്ട് ഡ്രൈവ് <
:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()
# VR ത്രെഡുകൾ —
vr_thread(main) ഇല്ലാതാക്കരുത്- ശ്രദ്ധിക്കുക, VR റോബോട്ട് Y കോർഡിനേറ്റ് പൂജ്യത്തേക്കാൾ വലുതാകുന്നതുവരെ ഓടിക്കുന്നു, തുടർന്ന് വലത്തേക്ക് തിരിയുന്നു, തുടർന്ന് X കോർഡിനേറ്റ് പൂജ്യത്തേക്കാൾ വലുതാകുന്നതുവരെ ഓടിക്കുന്നു. ഇത് VR റോബോട്ടിനെ നമ്പർ ഗ്രിഡ് മാപ്പ് പ്ലേഗ്രൗണ്ടിന്റെ മധ്യഭാഗത്ത്, സ്ഥലത്തിന് സമീപം (0, 0) സ്ഥാപിക്കുന്നു.
ചോദ്യങ്ങൾ
പാഠ ക്വിസ് ആക്സസ് ചെയ്യുന്നതിന് താഴെയുള്ള ലിങ്ക് തിരഞ്ഞെടുക്കുക.