
Leçon 1 : Qu'est-ce que le capteur de localisation ?
Dans cette leçon, vous apprendrez ce qu'est le capteur de localisation et comment utiliser le capteur de localisation pour naviguer dans le robot VR sur le plan de coordonnées sur le terrain de jeu de la carte à grille numérique. Vous apprendrez comment fonctionne le capteur de localisation et comment utiliser le capteur de localisation dans un projet VEXcode VR Python.
Résultats d'apprentissage
- Identifiez que le capteur de localisation lit les coordonnées (X,Y) à partir du point de virage central d'un robot VR.
- Identifiez que la commande position indique la position de coordonnée X ou Y d'un robot VR en millimètres ou en pouces.
- Décrivez pourquoi le capteur de localisation serait utilisé dans un projet.
Capteur de localisation
Un robot VR a un capteur de localisation intégré qui rapporte la position (X,Y) du robot VR. L'emplacement du robot VR est déterminé par le point de virage du centre avant. C'est également l'emplacement du stylo sur le robot VR.

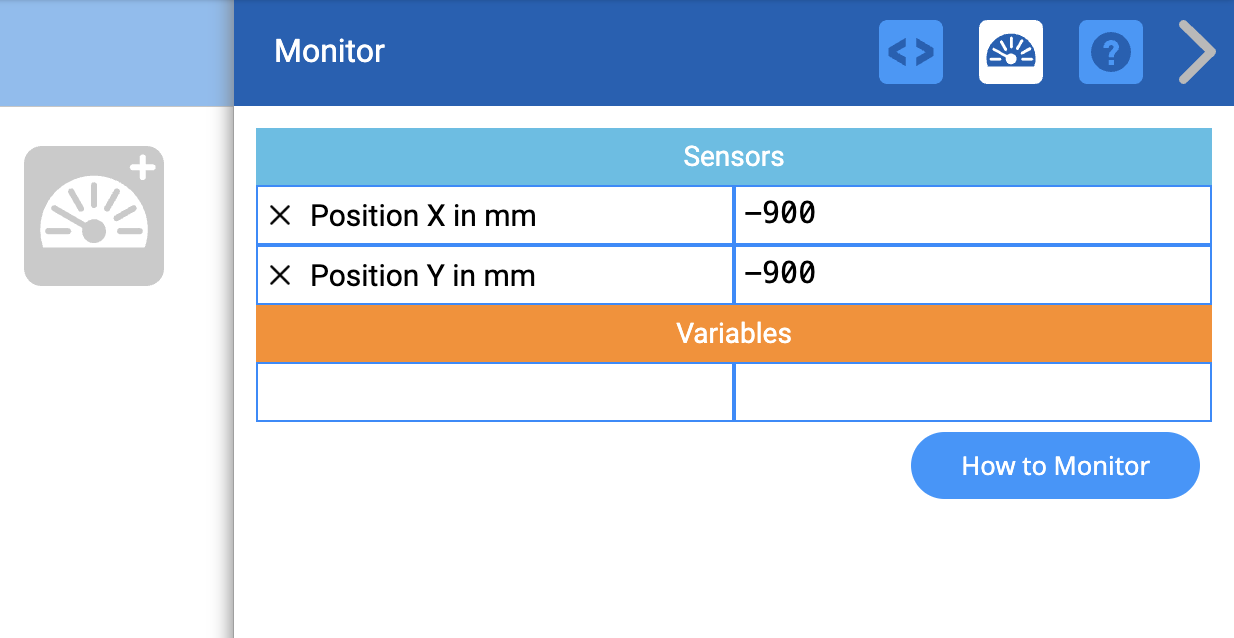
Les valeurs du capteur de localisation peuvent être vues sur le tableau de bord dans VEXcode VR.
Capteur de localisation et coordonnées dans les aires de jeux VR
Le capteur de localisation peut être utilisé pour naviguer dans les coordonnées de n'importe quel terrain de jeu. Chaque aire de jeux varie de -1000 millimètres (mm) à 1000 millimètres (mm) pour les positions X et Y.

Le tableau de bord VR VEXcode affiche la position (X,Y) d'un robot VR déterminée à partir du capteur de localisation.
Consultez l'article suivant pour savoir comment identifier les coordonnées (X,Y) sur un terrain de jeu et comment identifier les coordonnées de l'emplacement et de l'angle actuels d'un robot VR.
Pour plus d'informations sur la console de moniteur, consultez cet article.
Pour plus d'informations sur l'utilisation du système de coordonnées (X,Y) et des commandes de position, consultez l'article suivant.
Commande de position
Le capteur de localisation peut être utilisé pour naviguer dans le robot VR vers ou depuis un emplacement précis sur un terrain de jeu, en fonction de ses coordonnées X, Y. Les données du capteur de localisation peuvent être utilisées dans un projet afin que le robot VR puisse prendre une décision en fonction de sa position signalée sur le plan de coordonnées.
Utilisez la commande position dans un projet texte pour signaler la position du capteur de localisation. La commande position renvoie une valeur numérique qui indique la position de coordonnée X ou Y du centre du capteur de localisation (le centre du robot VR). Choisissez si la position des coordonnées X ou Y est signalée en entrant le paramètre X ou Y.
location.position(X, MM)
location.position(Y, MM)La commande position peut également signaler des valeurs en millimètres (mm) ou en pouces.
location.position(X, MM)
location.position(X, POUCES)Comme la commande get_distance décrite dans l'unité 5, la commande position est généralement utilisée avec une structure de contrôle, comme une boucle while , ainsi qu'un opérateur de comparaison, afin que le robot VR puisse utiliser les données du capteur de localisation pour naviguer le long des axes X et Y jusqu'à un emplacement. Vous en apprendrez davantage sur l’utilisation de la commande position de cette manière dans cette unité.
Affichage des données du capteur de localisation
Vous pouvez afficher les données rapportées par le capteur de localisation dans le tableau de bord VR ou via la console de surveillance. Chargez et exécutez l'exemple de projet « Localisation » pour voir comment les données du capteur de localisation sont rapportées, afin que vous puissiez les utiliser dans un projet pour naviguer dans le robot VR vers un emplacement spécifique.
Pour votre information
Le capteur de localisation peut également être utilisé pour signaler l'angle de la position du robot VR en degrés. Cela peut être utile lorsque vous essayez de vous tourner vers un emplacement précis ou de déplacer une quantité précise de votre position actuelle.
La commande position_angle peut être utilisée pour signaler la valeur numérique de l'angle de position du robot VR en degrés.
location.position_angle(DEGRÉS)L'exemple de projet « Détection de localisation » utilise les valeurs signalées par le capteur de localisation à l'aide des commandes position et position_angle .
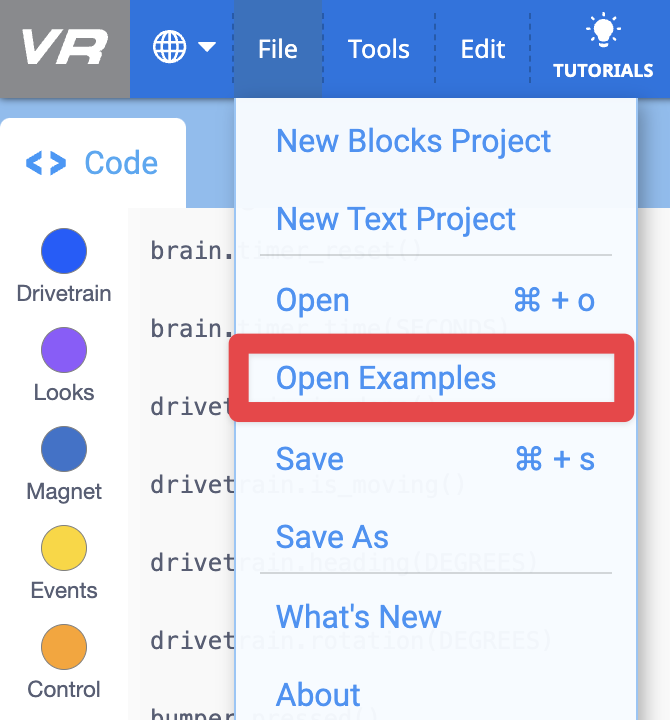
- Dans VEXcode VR, sélectionnez « Ouvrir les exemples » dans le menu déroulant Fichier.
- Sélectionnez l'exemple de projet « Emplacement ».
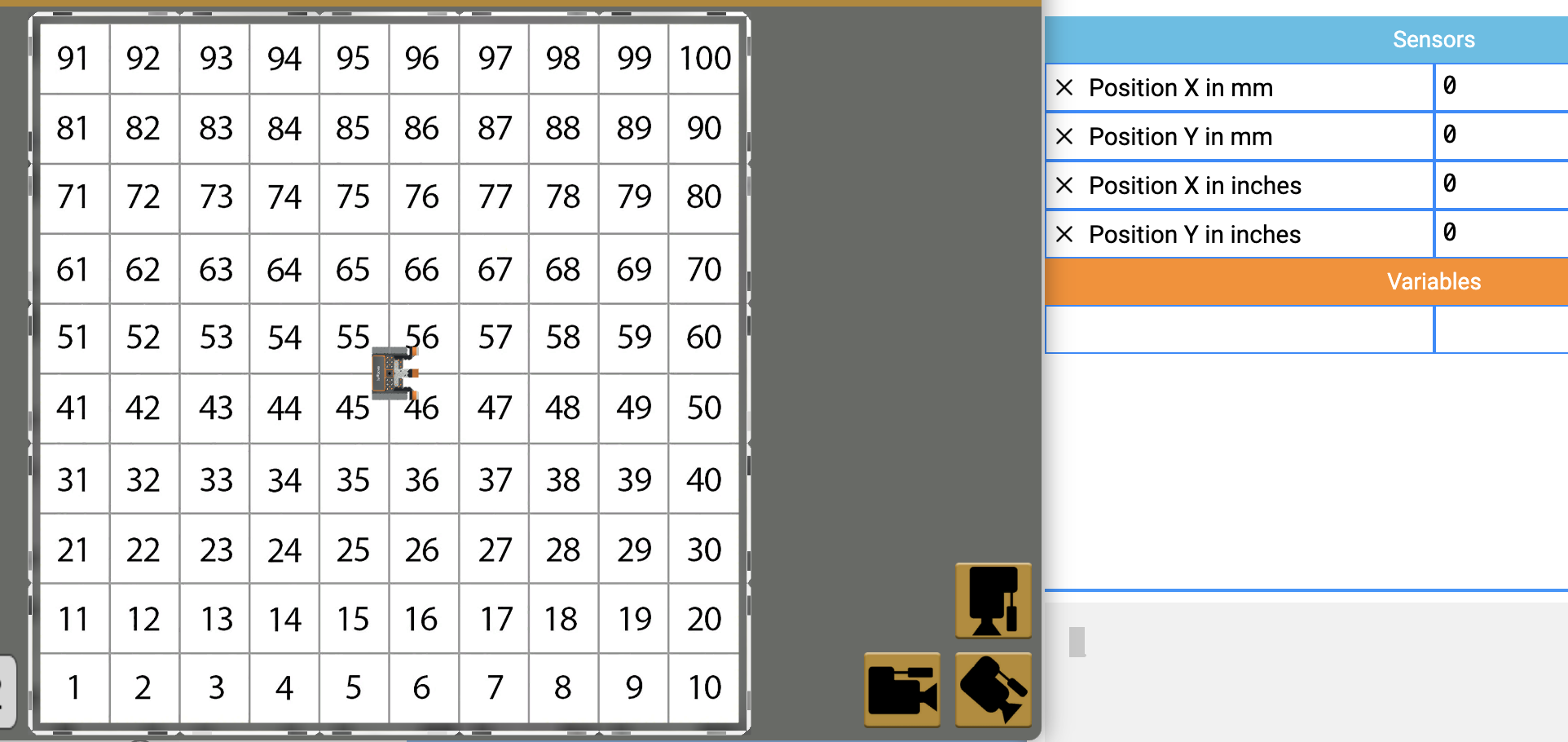
- Ouvrez la fenêtre Playground si elle n'est pas déjà ouverte. Assurez-vous que le terrain de jeu Number Grid Map s'ouvre et exécutez le projet. Ce projet est également présenté ici.
# Add project code in "main"
def main() :
# The robot will drive until it passes 0 on the Y axis
while location.position (Y, MM) < 0 :
drivetrain.drive (FORWARD)
wait(5, MSEC)
drivetrain.turn_for (RIGHT, 90, DEGREES)
# The robot will drive until it passes 0 on the X axis
while location.position (X, MM) < 0 :
drivetrain.drive (FORWARD)
wait(5, MSEC)
drivetrain.stop ()
# VR threads — Do not delete
vr_thread(main)- Notez que le robot VR conduit jusqu'à ce que la coordonnée Y soit supérieure à zéro, tourne à droite, puis conduit jusqu'à ce que la coordonnée X soit supérieure à zéro. Cela place le robot VR près du centre du terrain de jeu de la carte à grille numérique, près de l'emplacement (0, 0).
Questions
Veuillez sélectionner un lien ci-dessous pour accéder au questionnaire de la leçon.
Google Doc / .docx / .pdf