
الدرس 2: القيادة للمسافة - التحرك للأمام والخلف
في هذا الدرس، سوف تقوم بإنشاء مشروع يستخدم أوامر Drivetrain لهدم القلعة الأولى في Castle Crasher Playground!
مخرجات التعلم
- حدد كيفية استخدام أمر DRIVE_FOR لقيادة روبوت الواقع الافتراضي لمسافة محددة.
- حدد كيفية تغيير المعلمة في الأمر drive_for لتحريك روبوت الواقع الافتراضي للأمام والخلف.
- حدد كيفية استخدام الأمر set_drive_velocity لتعيين سرعة نظام نقل الحركة.
- حدد نطاق القيم المستخدمة في الأمر SET_DRIVE_ VELOCITY.
إنشاء مشروع جديد
يجب إنشاء مشروع نص جديد لكي يتمكن روبوت VR من التحرك للأمام من أجل الاصطدام بالقلعة الأولى في Castle Crasher Playground، ثم القيادة في الاتجاه المعاكس للعودة إلى وضع البداية.
اتبع هذه الخطوات لإنشاء مشروع نصي جديد بيثون.
- قم بتشغيل VEXcode VR على vr.vex.com.
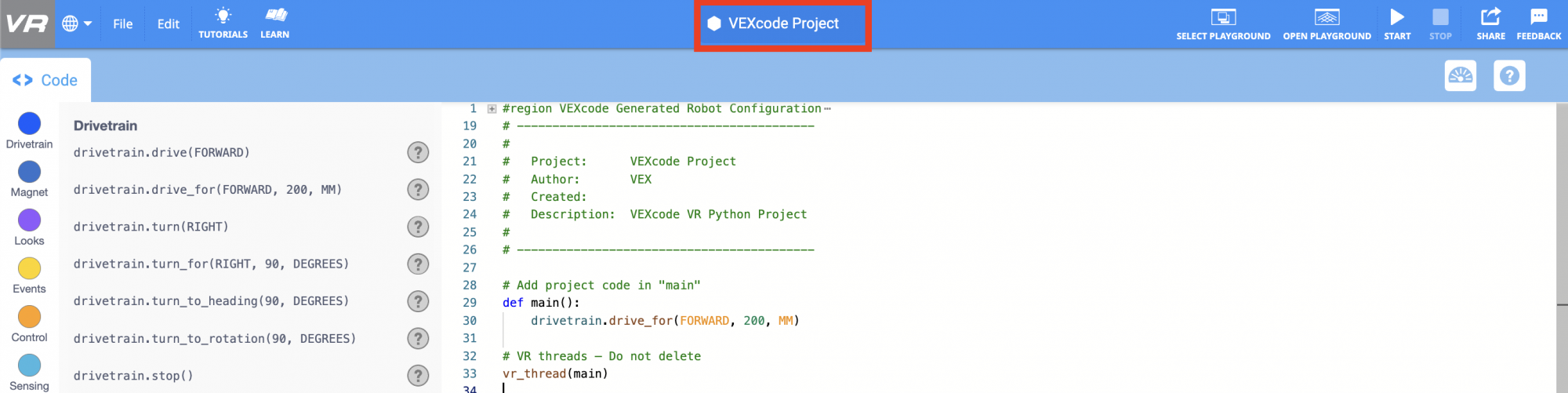
- بمجرد تشغيل VEXcode VR، حدد "ملف"، ثم "مشروع نصي جديد".

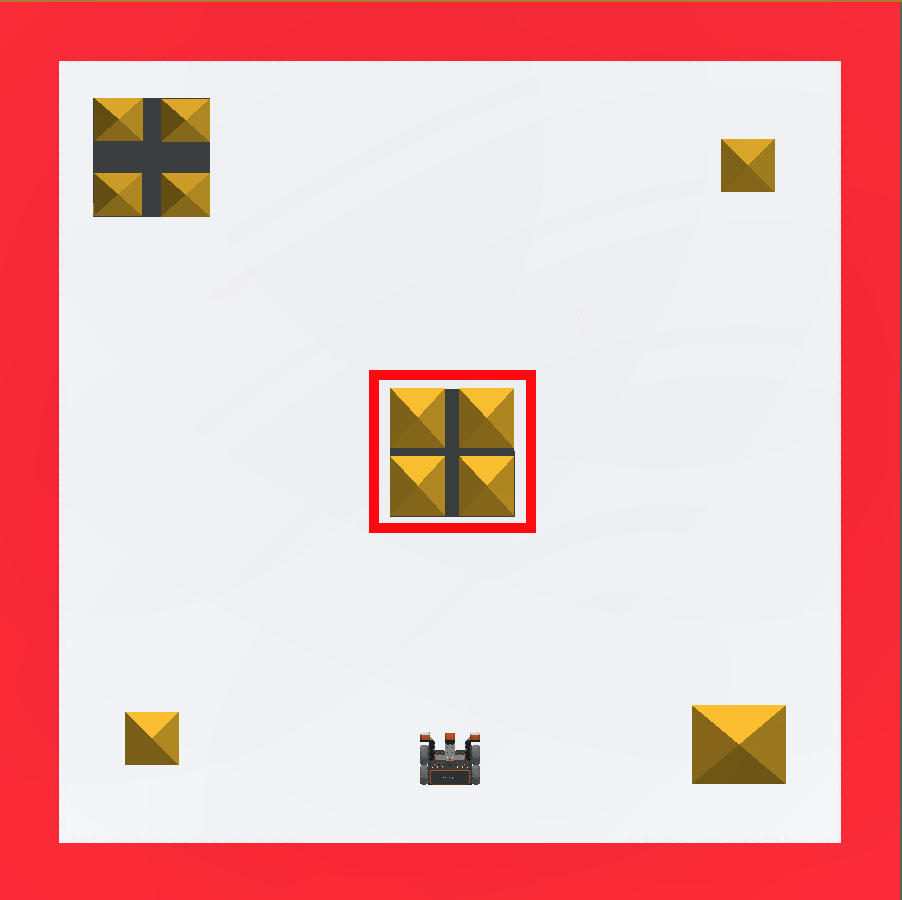
- سيُطلب منك اختيار ملعب بايثون. حدد ملعب Castle Crasher.
اسم مشروعك
- لتسمية مشروعك، حدد مربع اسم المشروع.
- أدخل اسم المشروع الجديد Unit2Lesson2، وحدد "حفظ".

القيادة للأمام والخلف
استخدم الأمر drive_for لبرمجة روبوت الواقع الافتراضي للتحرك للأمام لإسقاط القلعة الأولى في Castle Crasher Playground.
-
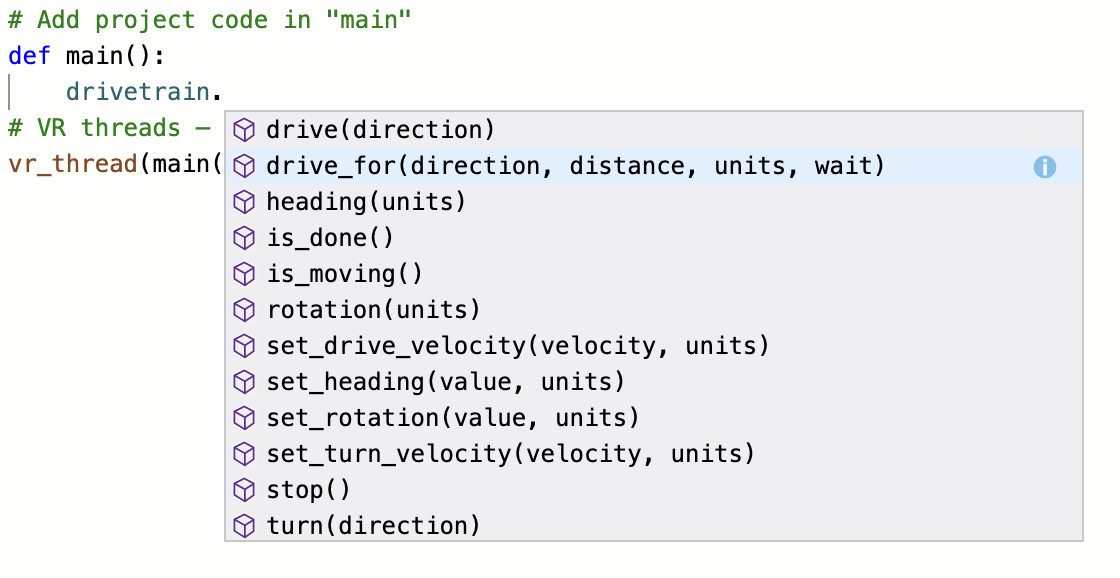
لاحظ أن الأمر drive_for موجود بالفعل في المشروع، كجزء من قالب المشروع الجديد. إذا لم يكن موجودًا بالفعل في مشروعك، فقم بسحب drive_ for إلى مساحة العمل وضعه تحت التعريف الرئيسي.
# Add project code in "main" def main (): drivetrain.drive_for (FORWARD, 200, MM) - أو ابدأ في كتابة الأمر في مساحة العمل. ستساعد وظيفة الإكمال التلقائي في منع الأخطاء أثناء كتابة
الأوامر.
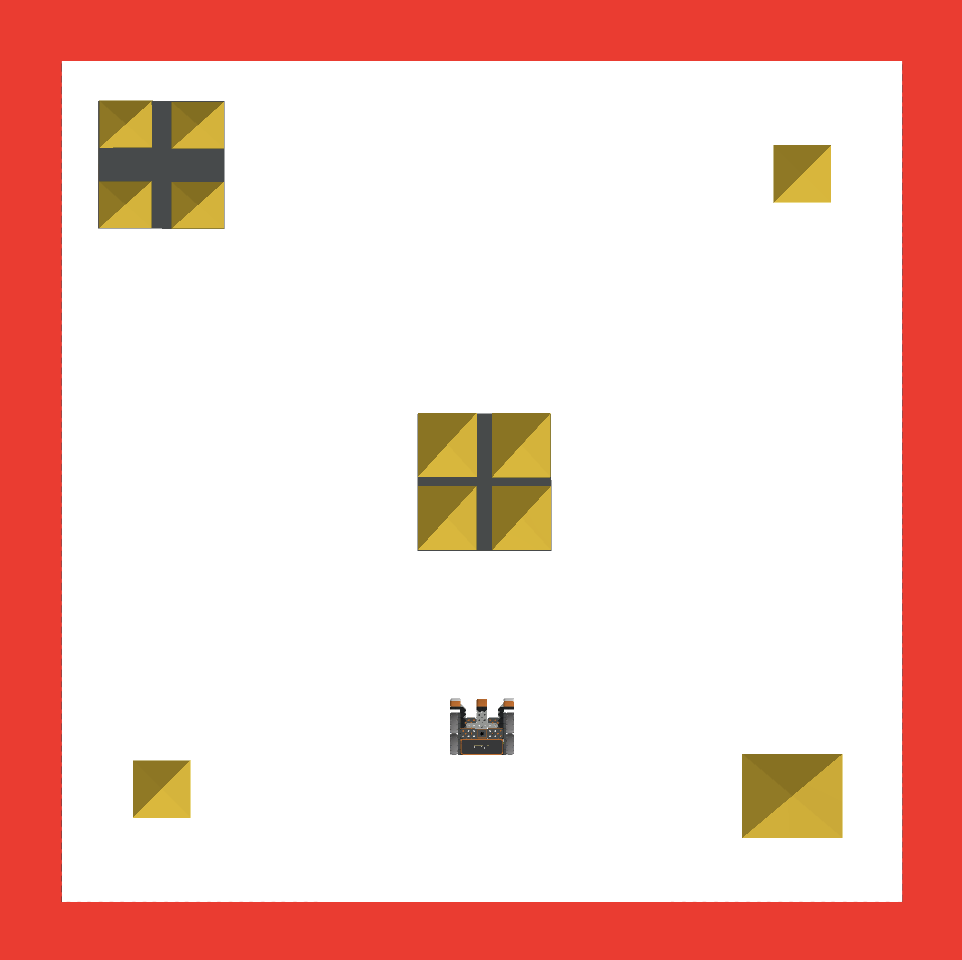
- حدد الزر "فتح الملعب" لفتح نافذة الملعب إذا لم تكن مفتوحة بالفعل.

- تأكد من أن Castle Crasher Playground مفتوح.
- في حالة فتح ملعب مختلف، قم بتغيير الملعب إلى Castle Crasher. لتغيير الملاعب، حدد
الزر "تحديد الملعب".

- حدد ملعب Castle Crasher.
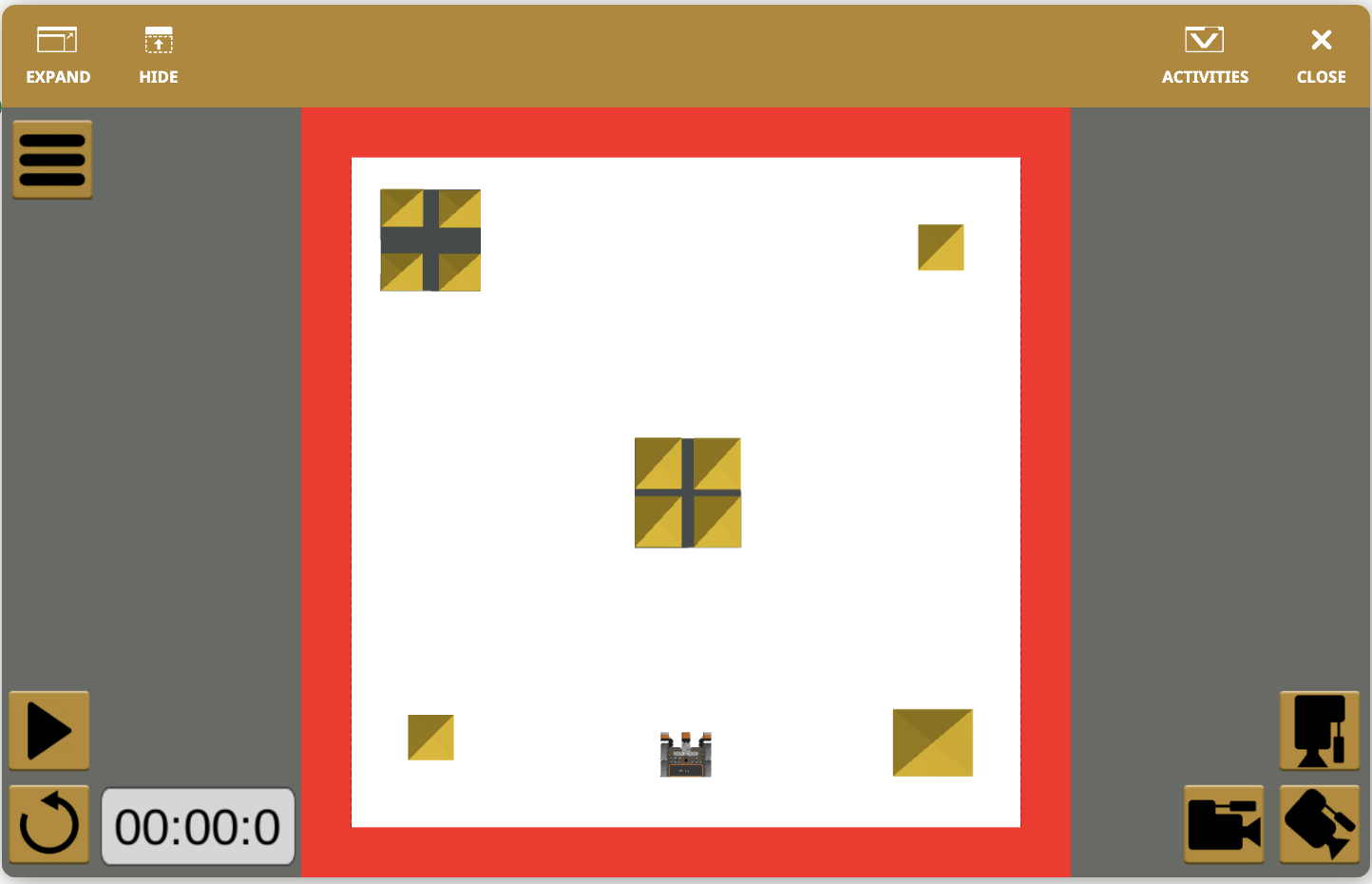
- حدد زر "ابدأ" لاختبار المشروع.

- سيقود روبوت الواقع الافتراضي للأمام لمسافة 200 ملليمتر (مم) في ملعب Castle
Crasher. لاحظ أن روبوت الواقع الافتراضي لم يلمس القلعة المركزية. يجب تعديل المعلمات الموجودة
في الأمر drive_for حتى يتمكن روبوت الواقع الافتراضي من القيادة لمسافة
أبعد.
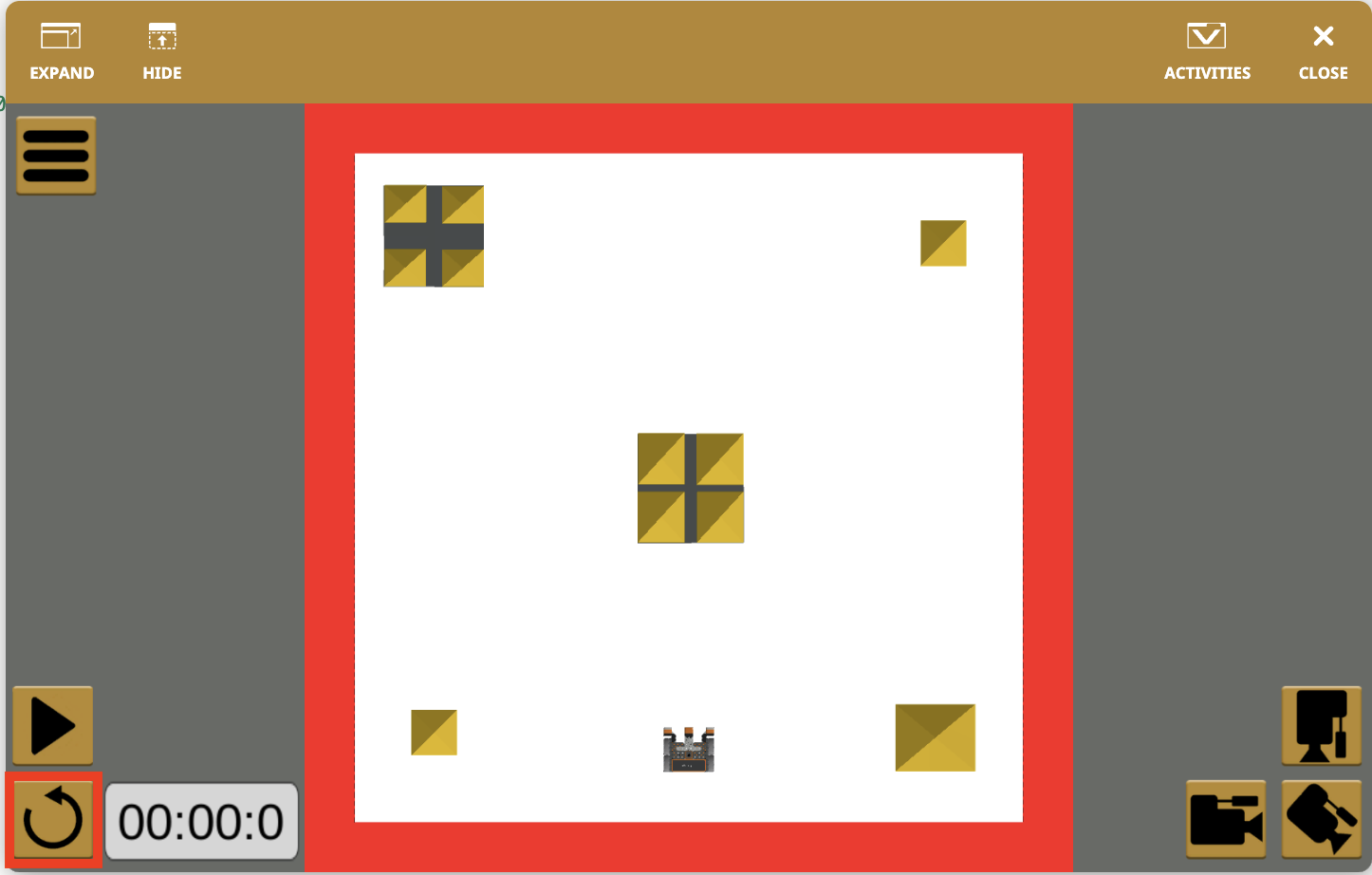
- حدد الزر "إعادة الضبط" لإعادة ضبط الملعب وحرك روبوت الواقع الافتراضي مرة أخرى إلى وضع البداية.
قم باختيار الزر التالي لمواصلة بقية هذا الدرس.