
Leçon 2 : Conduire à distance - Aller de l'avant et en marche arrière
Dans cette leçon, vous allez créer un projet qui utilise les commandes Drivetrain pour démolir le premier château du Castle Crasher Playground!
Résultats d'apprentissage
- Identifiez comment utiliser la commande drive_for pour conduire le robot VR sur une distance spécifique.
- Identifiez comment modifier le paramètre dans la commande drive_for pour déplacer le robot VR vers l'avant et vers l'arrière.
- Identifiez comment utiliser la commande set_drive_velocity pour régler la vitesse de la transmission.
- Identifiez la plage de valeurs utilisée dans la commande set_drive_velocity .
Créer un nouveau projet
Un nouveau projet de texte doit être créé pour que le VR Robot avance afin d'entrer en collision avec le premier château du Castle Crasher Playground, puis roule en marche arrière pour revenir à la position de départ.
Suivez ces étapes pour créer un nouveau projet de texte Python.
- Lancez VEXcode VR sur vr.vex.com.
- Une fois que vous avez lancé VEXcode VR, sélectionnez « Fichier », puis « Nouveau projet de texte ».

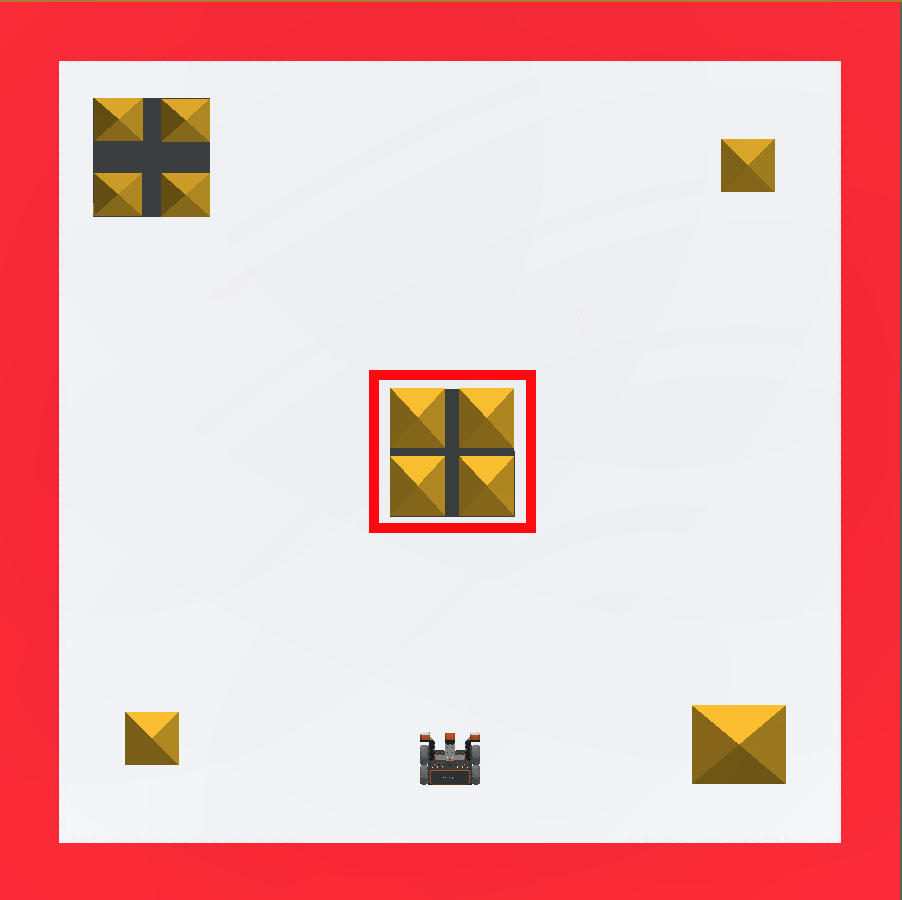
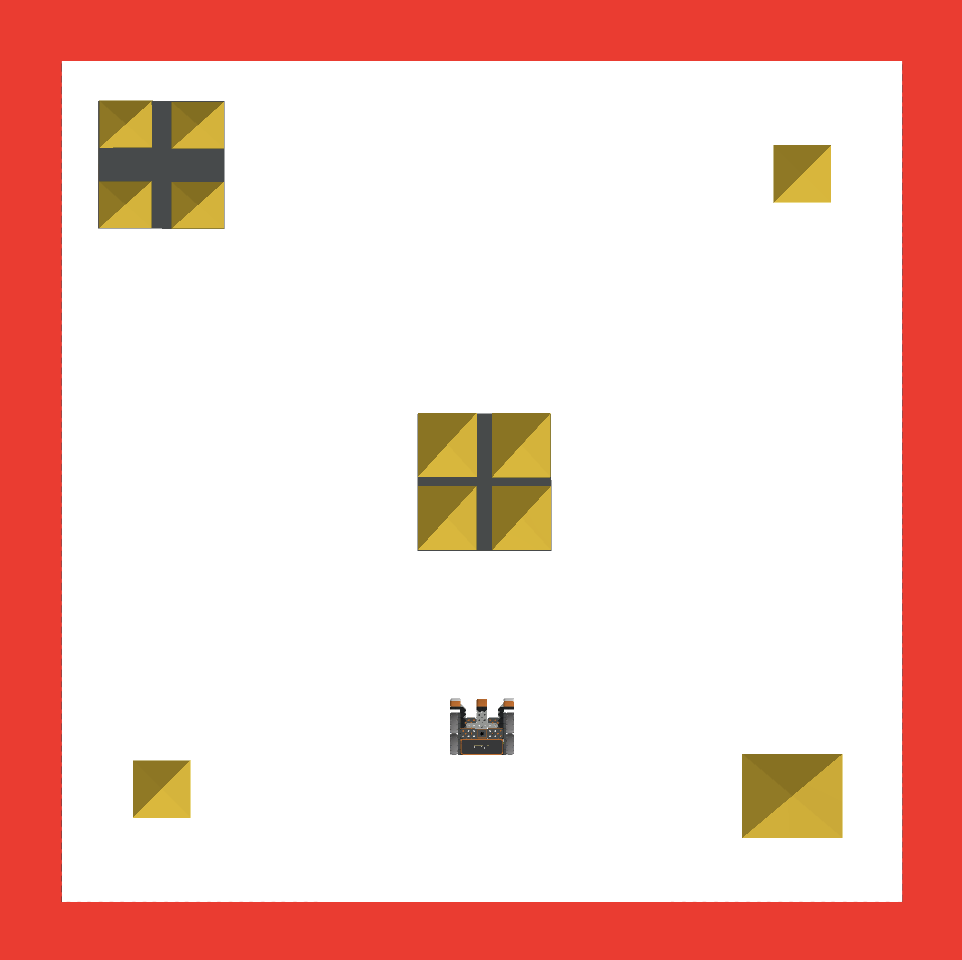
- Vous serez invité à choisir un terrain de jeu Python. Sélectionnez le terrain de jeu Castle Crasher.

Nommez votre projet
- Pour nommer votre projet, sélectionnez la zone de nom de projet.
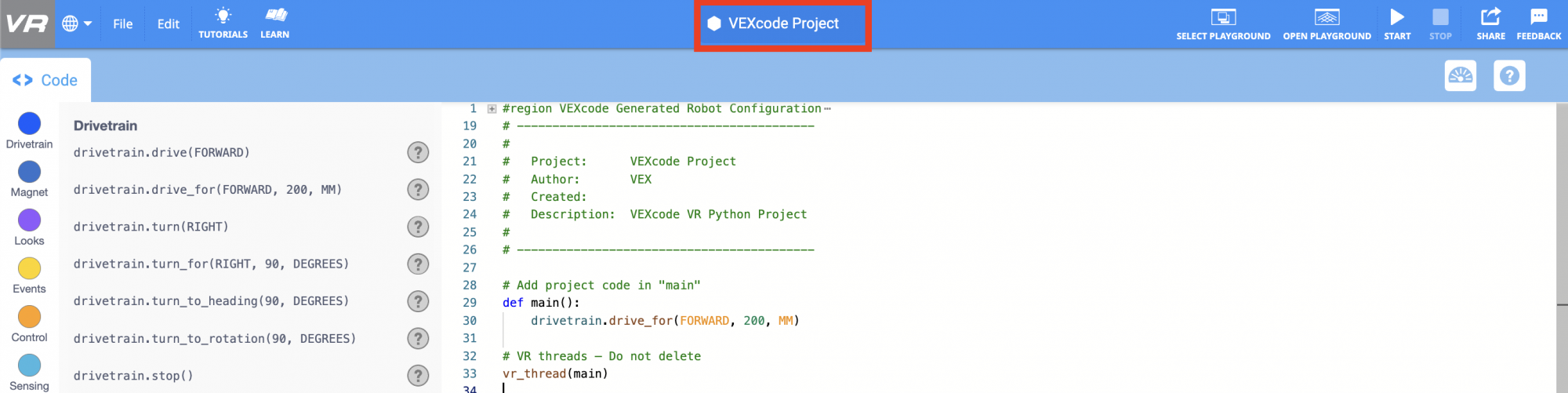
- Saisissez le nouveau nom du projet Unit2Lesson2, puis sélectionnez Enregistrer.

Conduire en marche avant et en marche arrière
Utilisez la commande drive_for pour programmer le robot VR afin qu'il avance pour renverser le premier château du Castle Crasher Playground.
-
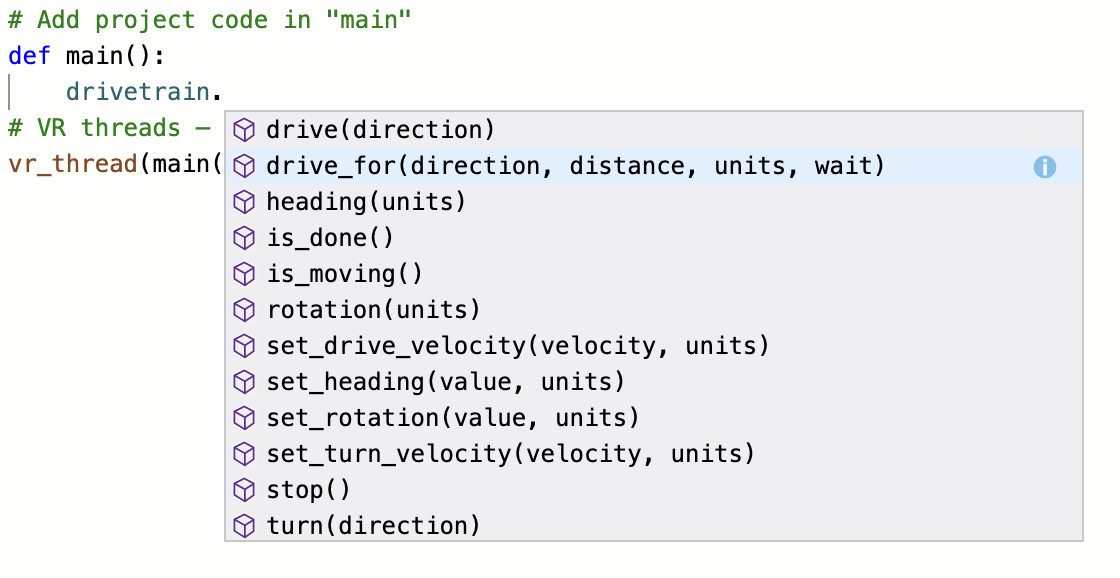
Notez que la commande drive_for est déjà présente dans le projet, dans le cadre du nouveau modèle de projet. Si ce n'est pas déjà le cas dans votre projet, faites glisser la commande drive_for dans l'espace de travail et placez-la sous la définition principale.
# Add project code in "main" def main() : drivetrain.drive_for(FORWARD, 200, MM) - Ou commencez à taper la commande dans l'espace de travail. La fonctionnalité de saisie semi-automatique aidera à prévenir les erreurs lors de la saisie des commandes.
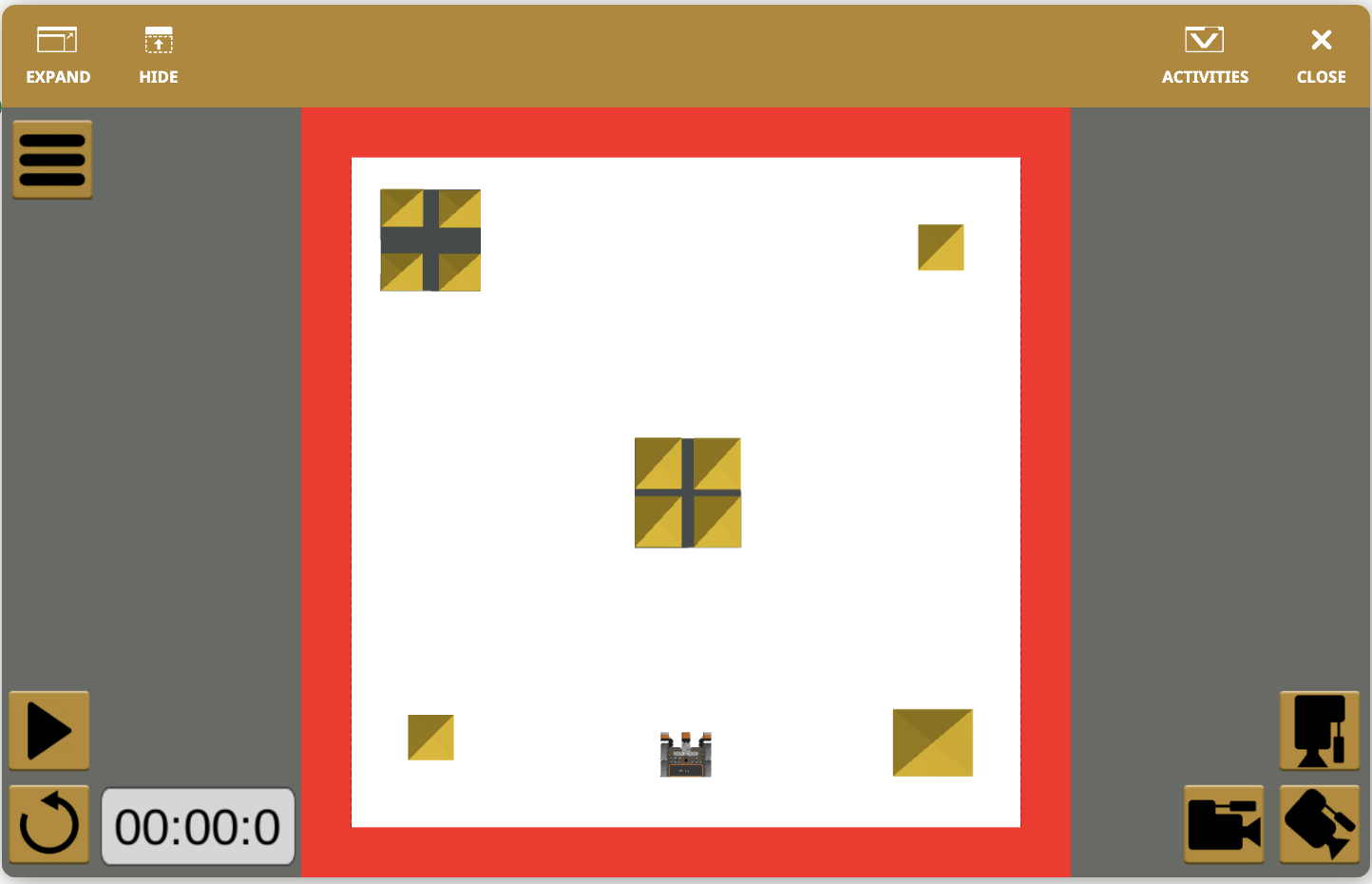
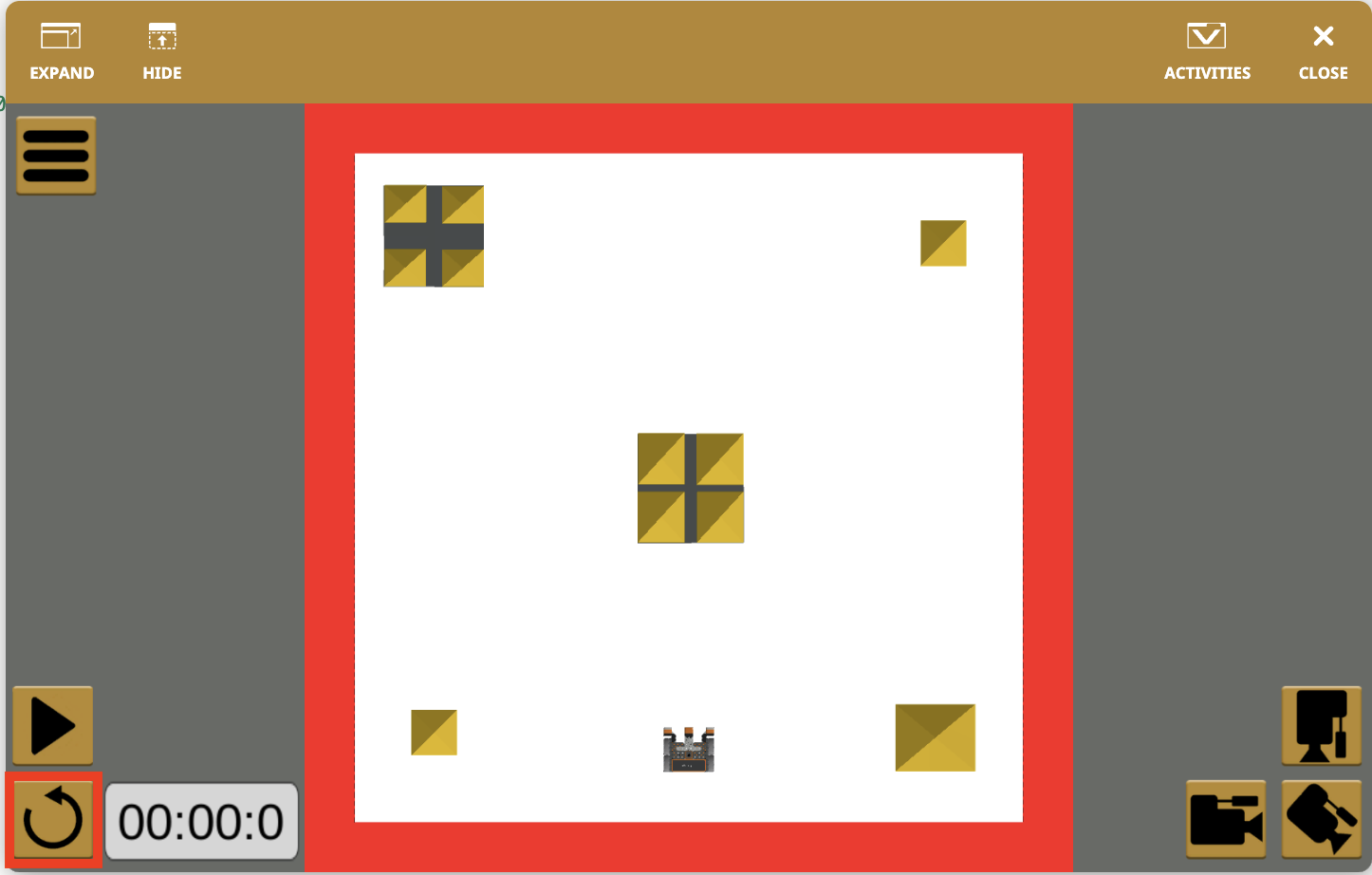
- Sélectionnez le bouton « Ouvrir le terrain de jeu » pour ouvrir la fenêtre du terrain de jeu si elle n'est pas déjà ouverte.

- Vérifiez que le Castle Crasher Playground est ouvert.
- Si un autre terrain de jeu s'ouvre, changez le terrain de jeu en Castle Crasher. Pour changer de terrain de jeu, sélectionnez le bouton « Sélectionner un terrain de jeu ».

- Sélectionnez le terrain de jeu Castle Crasher.

- Sélectionnez le bouton « Démarrer » pour tester le projet.

- Le robot VR avancera de 200 millimètres (mm) sur le terrain de jeu Castle Crasher. Notez que le robot VR n'a pas touché le château central. Les paramètres de la commande drive_for doivent être ajustés pour que le robot VR puisse continuer à rouler.
- Sélectionnez le bouton « Réinitialiser » pour réinitialiser le terrain de jeu et ramener le robot VR à la position de départ.
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.