
Lezione 2: Guida per distanza - Andare avanti e indietro
In questa lezione creerai un progetto che utilizza i comandi Drivetrain per abbattere il primo castello nel Castle Crasher Playground!
Risultati di apprendimento
- Scopri come utilizzare il comando drive_for per guidare il robot VR per una distanza specifica.
- Scopri come modificare il parametro nel comando drive_for per muovere il robot VR in avanti e indietro.
- Scopri come utilizzare il comando set_drive_velocity per impostare la velocità della trasmissione.
- Identificare l'intervallo di valori utilizzato nel comando set_drive_velocity .
Crea un nuovo progetto
È necessario creare un nuovo progetto di testo affinché il VR Robot possa muoversi in avanti per scontrarsi con il primo castello nel Castle Crasher Playground, quindi procedere in retromarcia per tornare alla posizione di partenza.
Segui questi passaggi per creare un nuovo progetto di testo Python.
- Lanciare VEXcode VR su vr.vex.com.
- Una volta avviato VEXcode VR, seleziona "File", quindi "Nuovo progetto di testo".

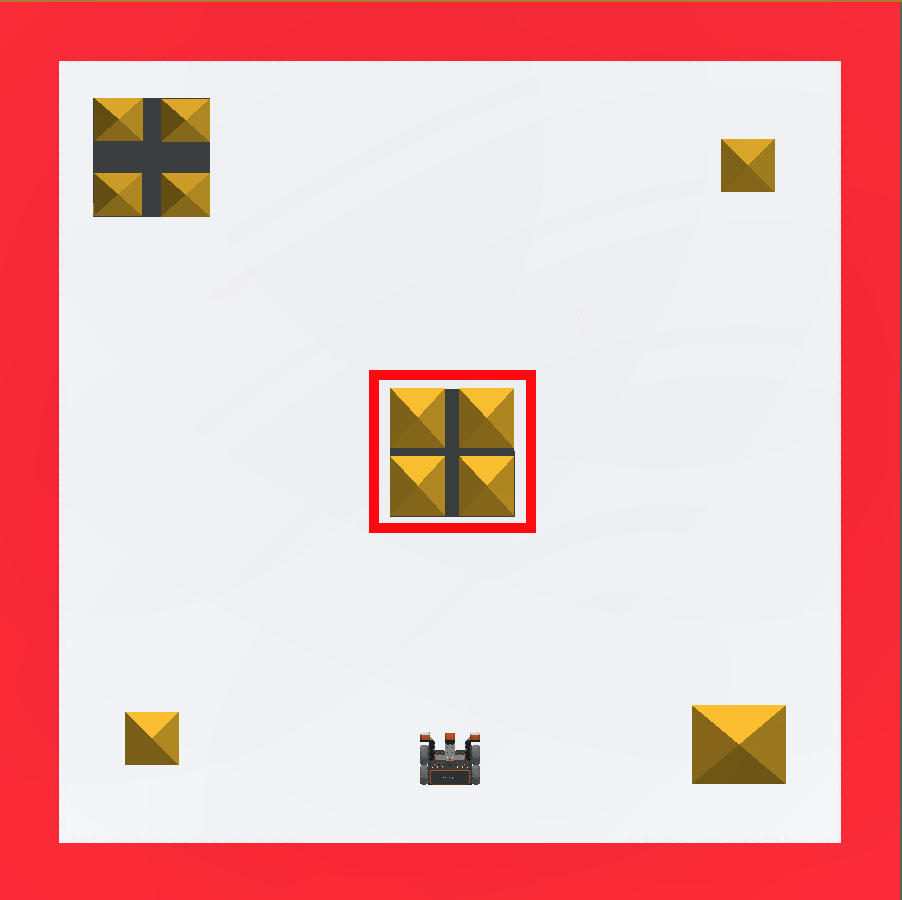
- Ti verrà chiesto di scegliere un parco giochi Python. Seleziona il parco giochi Castle Crasher.
Dai un nome al tuo progetto
- Per assegnare un nome al progetto, selezionare la casella del nome del progetto.
- Inserisci il nuovo nome del progettoUnit2Lesson2 e seleziona "Salva".

Guida in avanti e in retromarcia
Utilizzare il comando drive_for per programmare il Robot VR in modo che si muova in avanti per abbattere il primo castello sul Castle Crasher Playground.
-
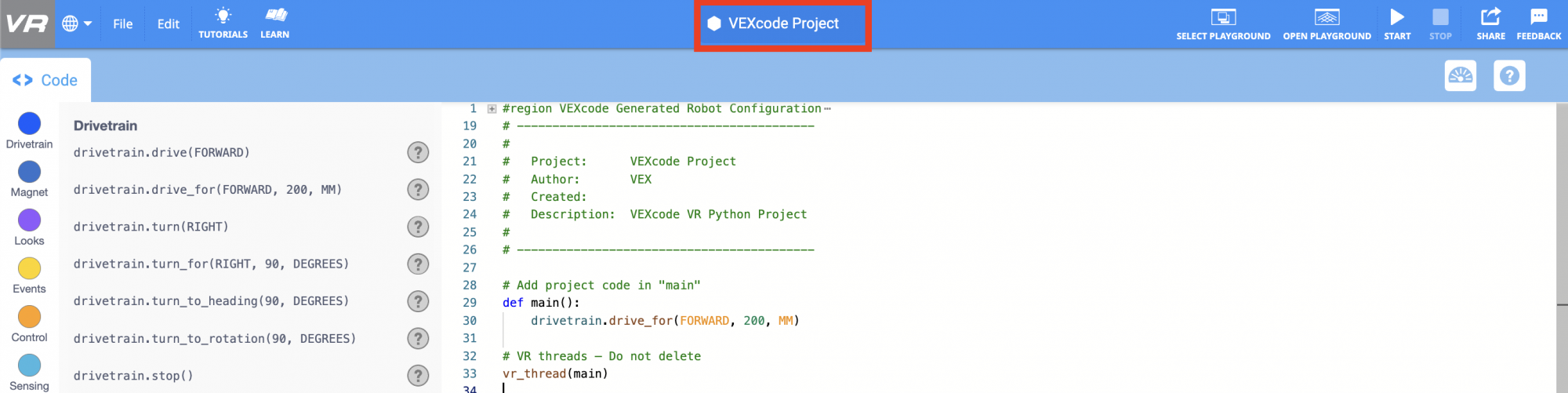
Nota che il comando drive_for è già presente nel progetto, come parte del nuovo modello di progetto. Se non è già presente nel progetto, trascinare il comando drive_for nell'area di lavoro e posizionarlo sotto la definizione principale.
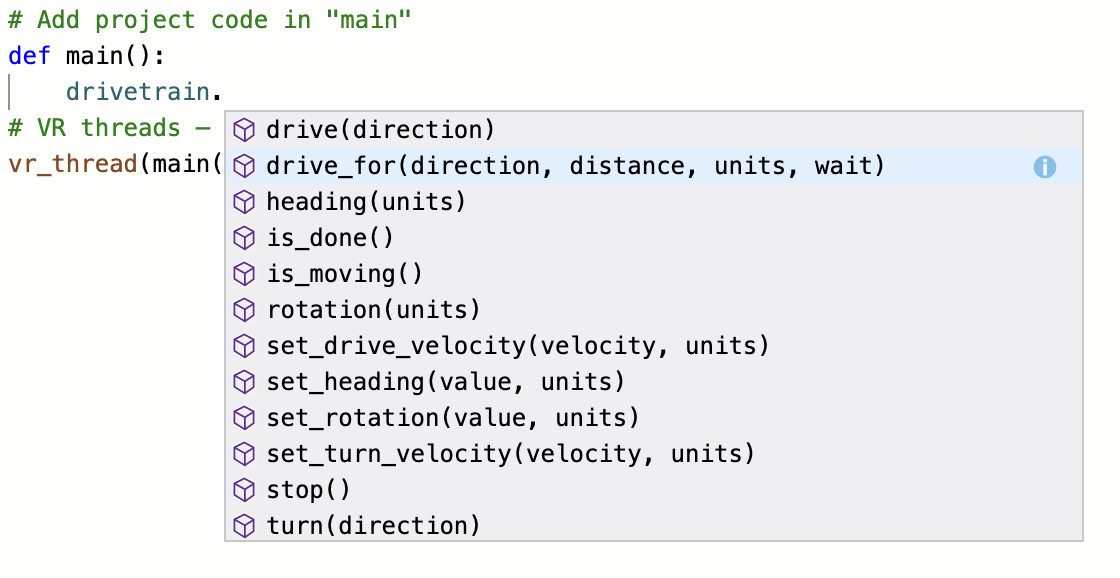
# Aggiungi codice progetto in "main" def main(): drivetrain.drive_for(FORWARD, 200, MM) - Oppure, inizia a digitare il comando nell'area di lavoro. La funzionalità di completamento automatico aiuterà a prevenire errori durante la digitazione dei comandi.
- Selezionare il pulsante "Apri parco giochi" per aprire la finestra del parco giochi se non è già aperta.

- Controlla che il parco giochi Castle Crasher sia aperto.
- Se si apre un parco giochi diverso, cambialo in Castle Crasher. Per modificare i campi da gioco, selezionare il pulsante "Seleziona parco giochi".

- Seleziona il parco giochi Castle Crasher.
- Selezionare il pulsante "Start" per testare il progetto.

- Il robot VR avanzerà per 200 millimetri (mm) nel parco giochi Castle Crasher. Si noti che il robot VR non ha toccato il castello centrale. I parametri nel comando drive_for devono essere regolati affinché il robot VR possa proseguire più a lungo.
- Selezionare il pulsante "Reset" per ripristinare il parco giochi e riportare il robot VR alla posizione di partenza.
Selezionare il pulsante Avanti per continuare con il resto della lezione.