
บทเรียนที่ 2: การขับรถในระยะทาง - การเคลื่อนที่ไปข้างหน้าและในทางกลับกัน
ในบทเรียนนี้ คุณจะสร้างโปรเจ็กต์ ที่ใช้คำสั่ง Drivetrain เพื่อทำลายปราสาทแรกใน Castle Crasher Playground!
ผลการเรียนรู้
- ระบุวิธีใช้คำสั่ง drive_for เพื่อขับเคลื่อนหุ่นยนต์ VR ในระยะทางที่กำหนด
- ระบุวิธีเปลี่ยนพารามิเตอร์ในคำสั่ง drive_for เพื่อเคลื่อนหุ่นยนต์ VR ไปข้างหน้าและถอยหลัง
- ระบุวิธีใช้คำสั่ง set_drive_velocity เพื่อตั้งค่าความเร็วของระบบส่งกำลัง
- ระบุช่วงค่าที่ใช้ในคำสั่ง set_drive_velocity
สร้างโปรเจกต์ใหม่
จะต้องสร้างโครงการข้อความใหม่ เพื่อให้หุ่นยนต์ VR เคลื่อนที่ไปข้างหน้าเพื่อที่จะชนกับปราสาทตัวแรกในสนามเด็กเล่น Castle Crasher จากนั้นขับถอยหลังเพื่อกลับสู่ตำแหน่งเริ่มต้น
ทำตามขั้นตอนเหล่านี้เพื่อสร้างโปรเจกต์ข้อความ Python ใหม่
- เปิด VEXcode VR ที่vr.vex.com
- เมื่อคุณเปิดใช้ VEXcode VR แล้วให้เลือก "ไฟล์" จากนั้นเลือก "โปรเจกต์ข้อความใหม่"

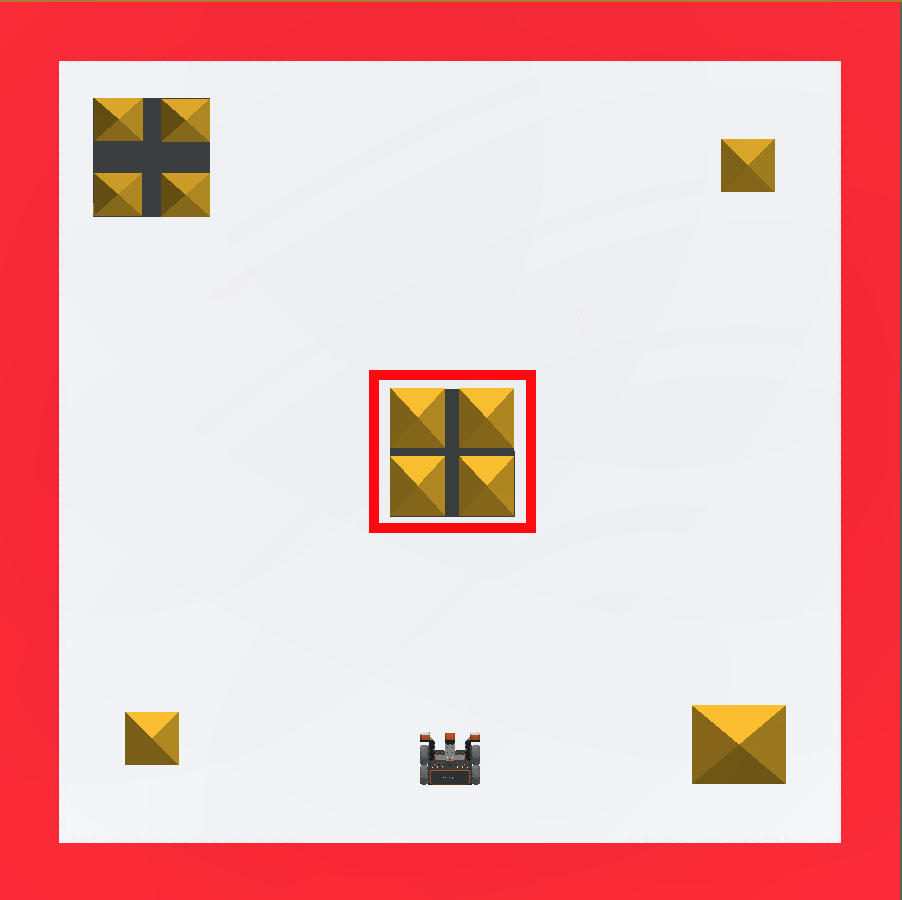
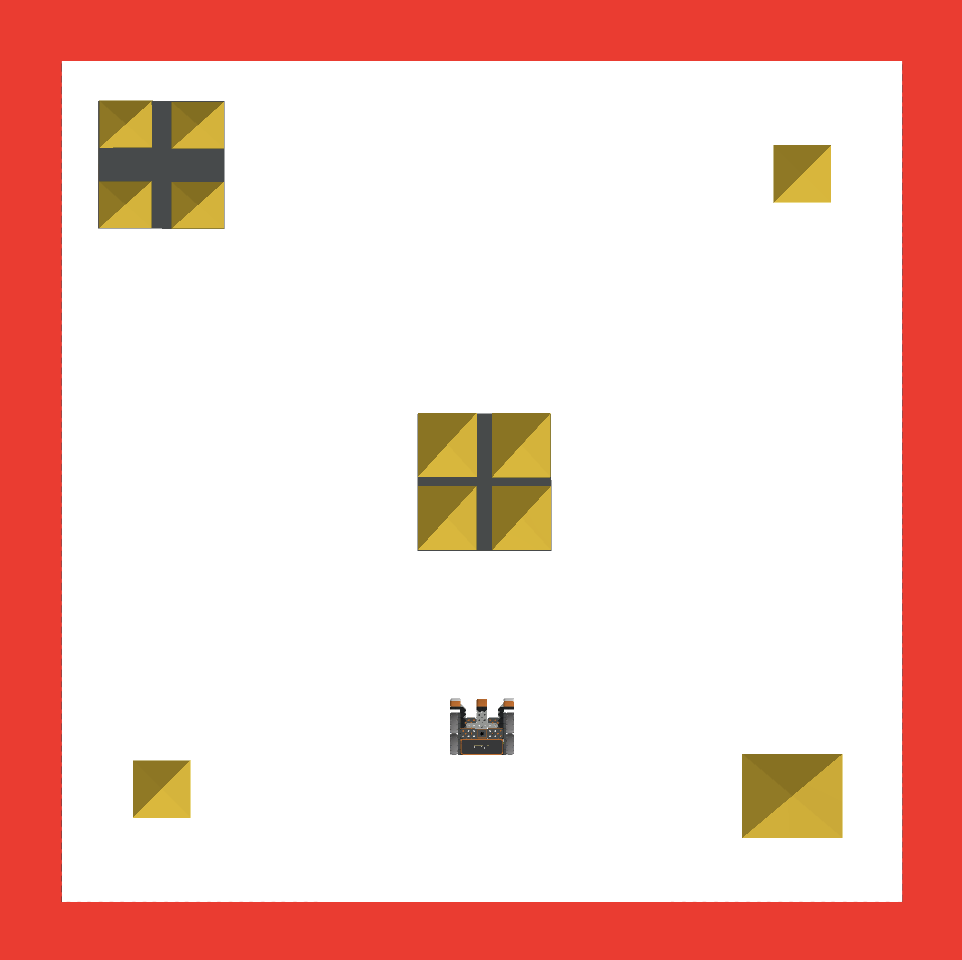
- คุณจะได้รับแจ้งให้เลือกสนามเด็กเล่น Python เลือกสนาม เด็กเล่น CastleCrasher

ตั้งชื่อโปรเจกต์ของ
- หากต้องการตั้งชื่อโปรเจกต์ให้เลือกช่องชื่อโปรเจกต์
- ป้อนชื่อโปรเจ กต์ใหม่Unit2Lesson2 และเลือก "บันทึก"

ขับไปข้างหน้าและในทางกลับกัน
ใช้คำสั่ง drive_for เพื่อตั้งโปรแกรมให้ VR Robot เคลื่อนที่ไปข้างหน้าเพื่อล้มปราสาทแรกใน Castle Crasher Playground
-
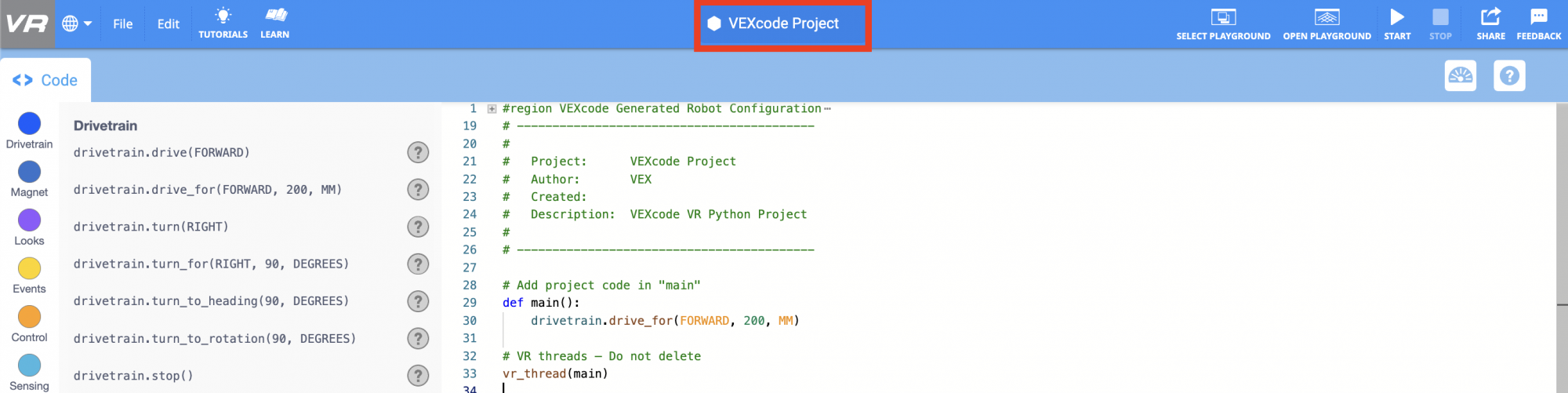
สังเกตว่าคำสั่ง drive_for มีอยู่ในโครงการแล้ว โดยเป็นส่วนหนึ่งของเทมเพลตโครงการใหม่ หากยังไม่มีอยู่ในโครงการของคุณ ให้ลากคำสั่ง drive_for ลงไปในเวิร์กสเปซและวางไว้ใต้คำจำกัดความหลัก
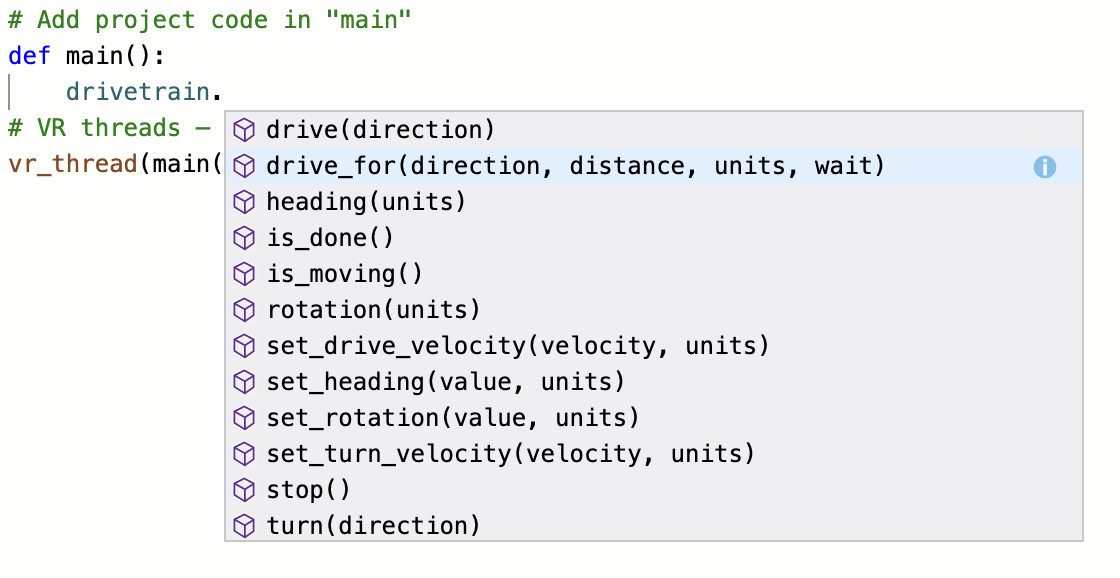
# เพิ่มรหัสโครงการใน "main" def main (): drivetrain.drive_for (FORWARD, 200, MM) - หรือเริ่มพิมพ์คำสั่งในพื้นที่ทำงาน ฟังก์ชันการเติมข้อความอัตโนมัติจะช่วยป้องกันข้อผิดพลาดขณะพิมพ์คำสั่ง
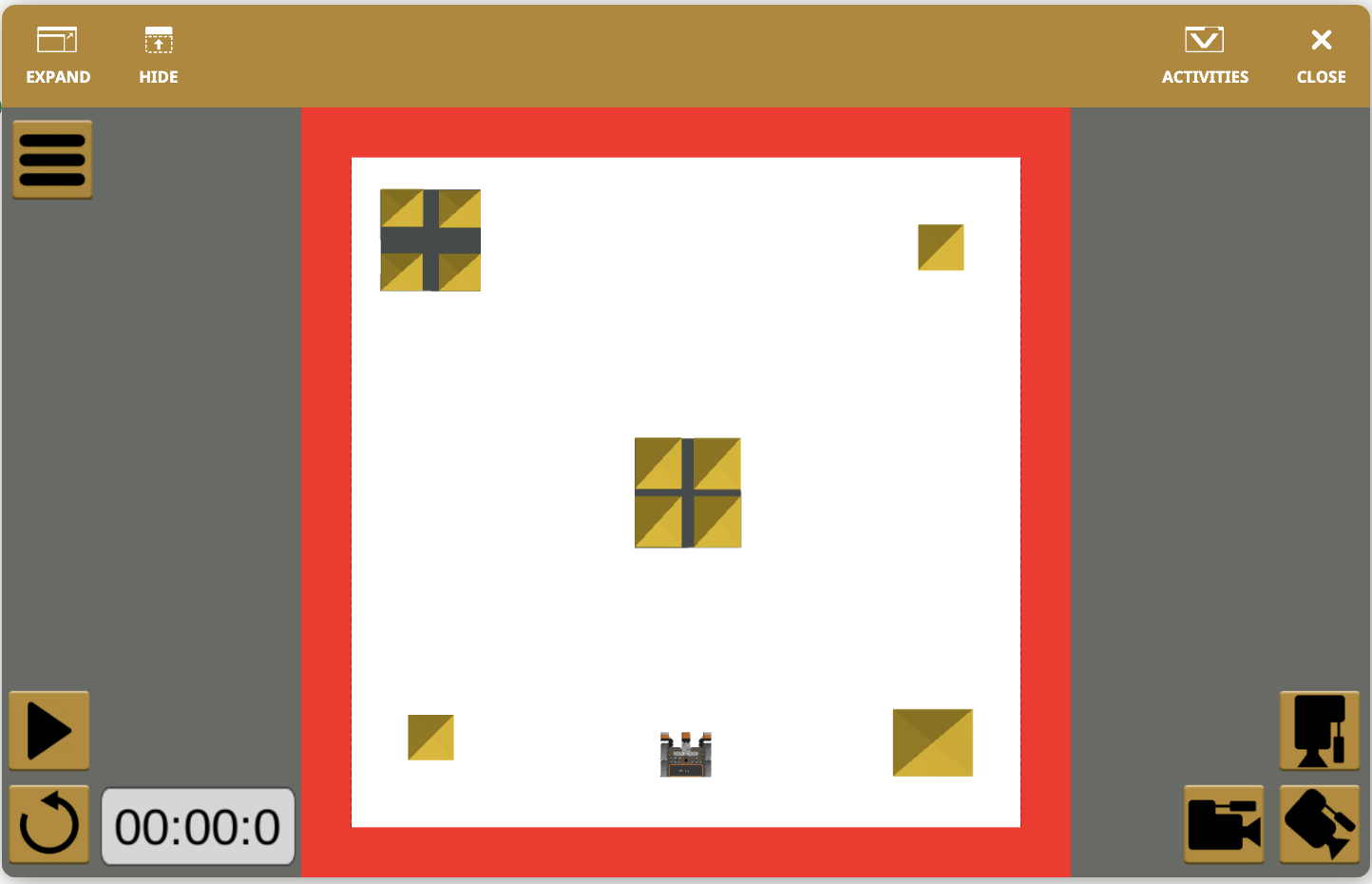
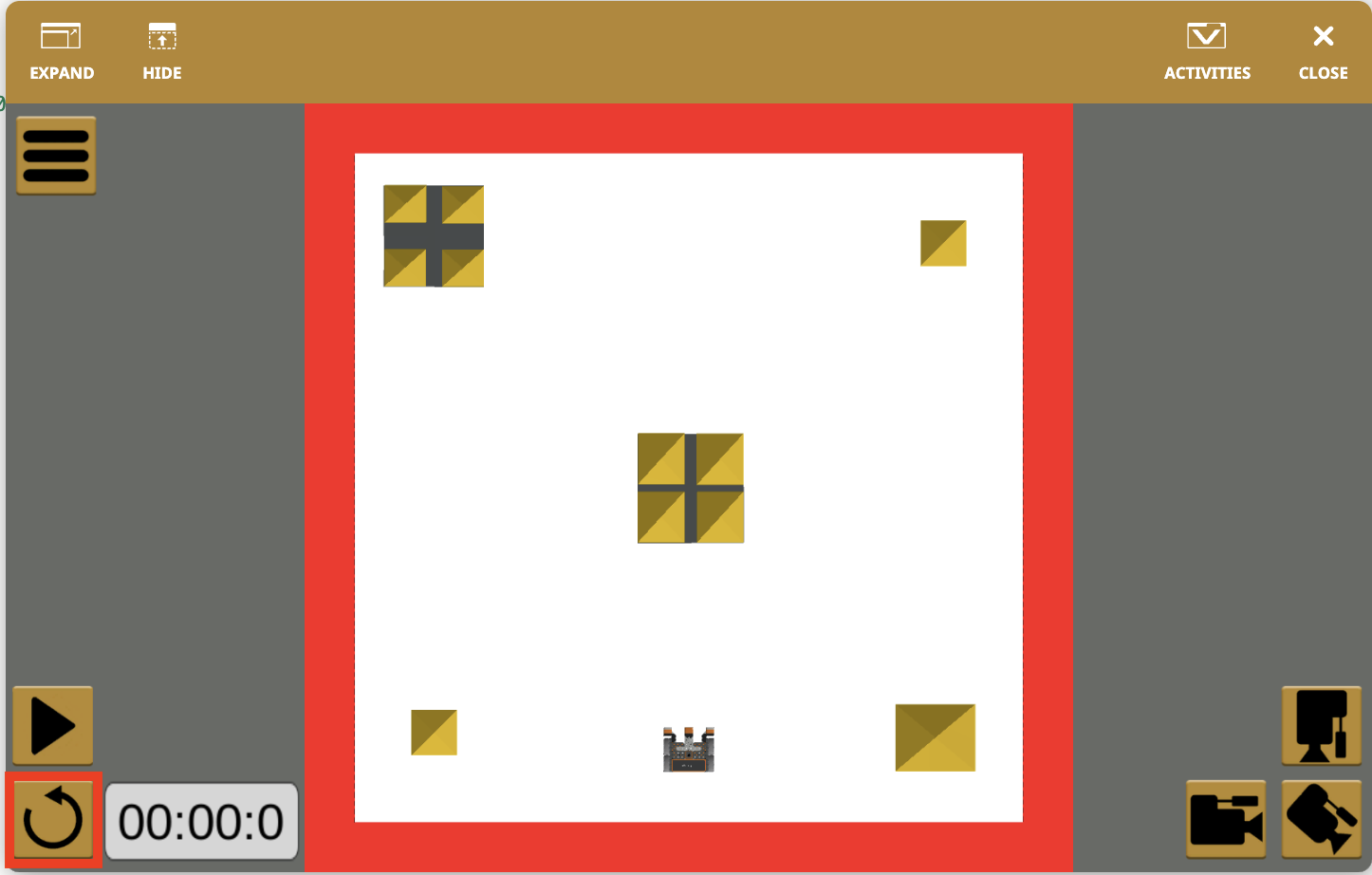
- เลือกปุ่ม "เปิดสนามเด็กเล่น" เพื่อเปิดหน้าต่างสนามเด็กเล่น หากยังไม่ได้เปิด

- ตรวจสอบให้แน่ใจว่า Castle Crasher Playground เปิดอยู่
- หากสนามเด็กเล่นอื่นเปิดขึ้น ให้เปลี่ยนสนามเด็กเล่นเป็น CastleCrasher หากต้องการเปลี่ยนสนามเด็กเล่นให้เลือกปุ่ม 'เลือกสนามเด็กเล่น'

- เลือกสนามเด็กเล่น Castle Crasher

- เลือกปุ่ม "เริ่ม" เพื่อทดสอบโปรเจกต์

- หุ่นยนต์ VR จะขับเคลื่อนไปข้างหน้าเป็นระยะทาง 200 มิลลิเมตร (มม.) บนสนามเด็กเล่น CastleCrasher โปรดทราบว่าหุ่นยนต์ VR ไม่ได้แตะต้องปราสาทตรงกลาง จำเป็นต้องปรับพารามิเตอร์ในคำสั่ง drive_for เพื่อให้หุ่นยนต์ VR ขับเคลื่อนได้ไกลขึ้น
- เลือกปุ่ม "รีเซ็ต" เพื่อรีเซ็ตสนามเด็กเล่นและย้ายหุ่นยนต์ VR กลับไปที่ตำแหน่งเริ่มต้น
เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป