
पाठ 2: दूरी के लिए ड्राइविंग - आगे और पीछे की ओर बढ़ना
इस पाठ में, आप एक प्रोजेक्ट बनाएंगे जो ड्राइवट्रेन कमांड का उपयोग करके कैसल क्रैशर प्लेग्राउंडमें पहले महल को गिरा देगा!
सीखने के परिणाम
- वीआर रोबोट को एक विशिष्ट दूरी तक ले जाने के लिए drive_forकमांड का उपयोग कैसे करें, इसकी पहचान करें।
- वीआर रोबोट को आगे और पीछे ले जाने के लिए drive_forकमांड में पैरामीटर को कैसे बदलना है, इसकी पहचान करें।
- ड्राइवट्रेन की गति निर्धारित करने के लिए set_drive_velocityकमांड का उपयोग कैसे करें, इसकी पहचान करें।
- set_drive_velocityकमांड में प्रयुक्त मानों की श्रेणी की पहचान करें।
एक नया प्रोजेक्ट बनाएँ
वीआर रोबोट को आगे बढ़ने के लिए एक नया टेक्स्ट प्रोजेक्ट बनाना होगा ताकि वह कैसल क्रैशर प्लेग्राउंडमें पहले महल से टकरा सके, फिर शुरुआती स्थिति में लौटने के लिए रिवर्स में ड्राइव कर सके।
नया पायथन टेक्स्ट प्रोजेक्ट बनाने के लिए इन चरणों का पालन करें।
- vr.vex.comपर VEXcode VR लॉन्च करें।
- एक बार जब आप VEXcode VR लॉन्च करते हैं, तो "फ़ाइल" और फिर "नया टेक्स्ट प्रोजेक्ट" चुनें।

- आपको पायथन खेल का मैदान चुनने के लिए कहा जाएगा। कैसल क्रैशर खेल का मैदानचयन करें।
अपने प्रोजेक्ट का नाम रखें
- अपने प्रोजेक्ट को नाम देने के लिए, प्रोजेक्ट नाम बॉक्स का चयन करें.
- नया प्रोजेक्ट नाम दर्ज करें Unit2Lesson2, और “सहेजें” चुनें।

आगे और पीछे की ओर ड्राइव करें
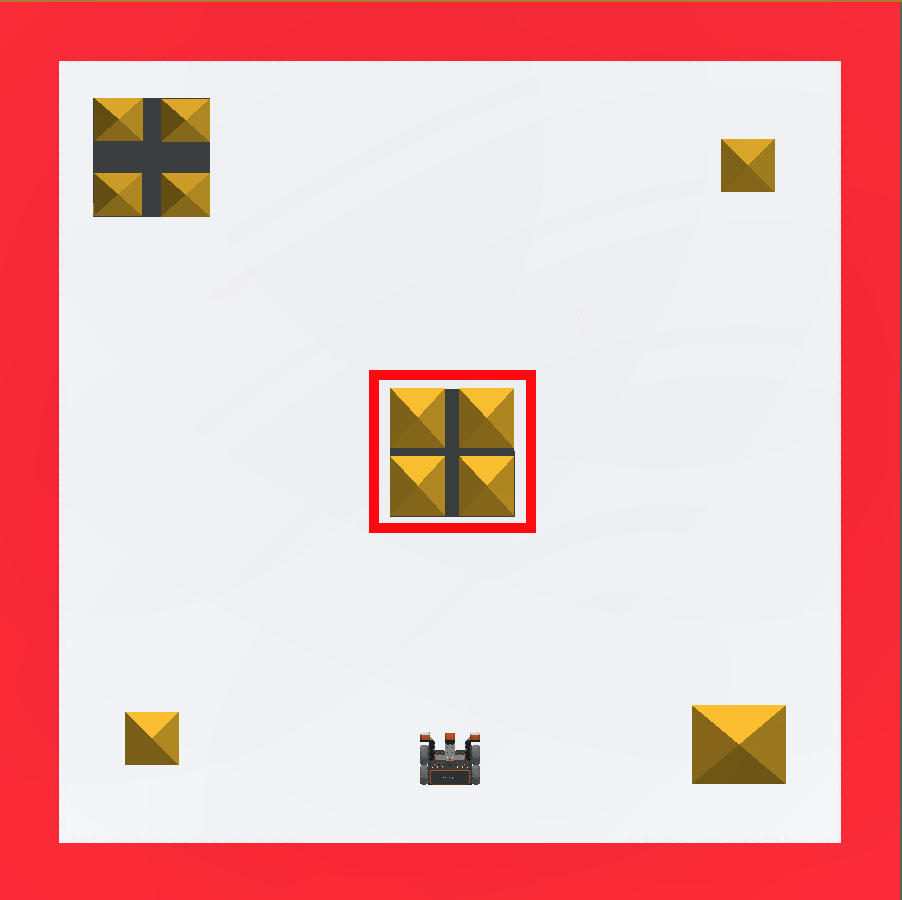
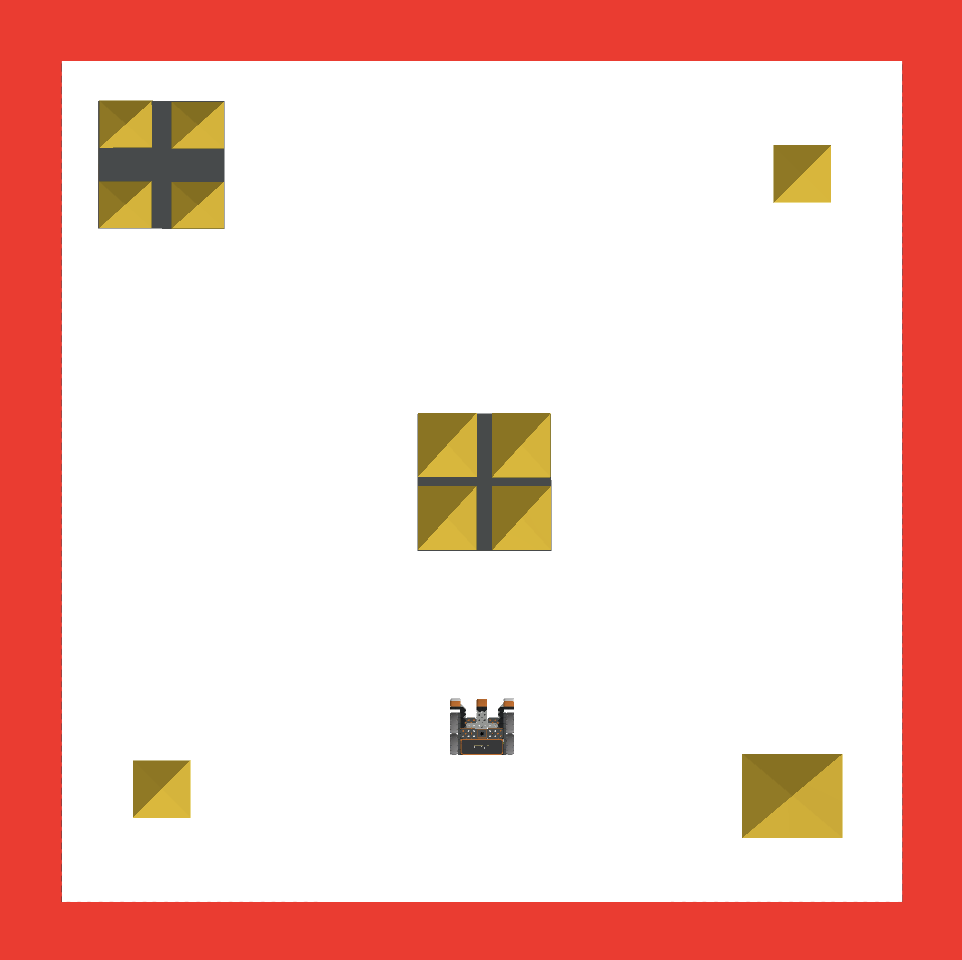
drive_forकमांड का उपयोग करके VR रोबोट को आगे बढ़ने के लिए प्रोग्राम करें ताकि वह कैसल क्रैशर खेल के मैदानपर पहले महल को गिरा सके।
-
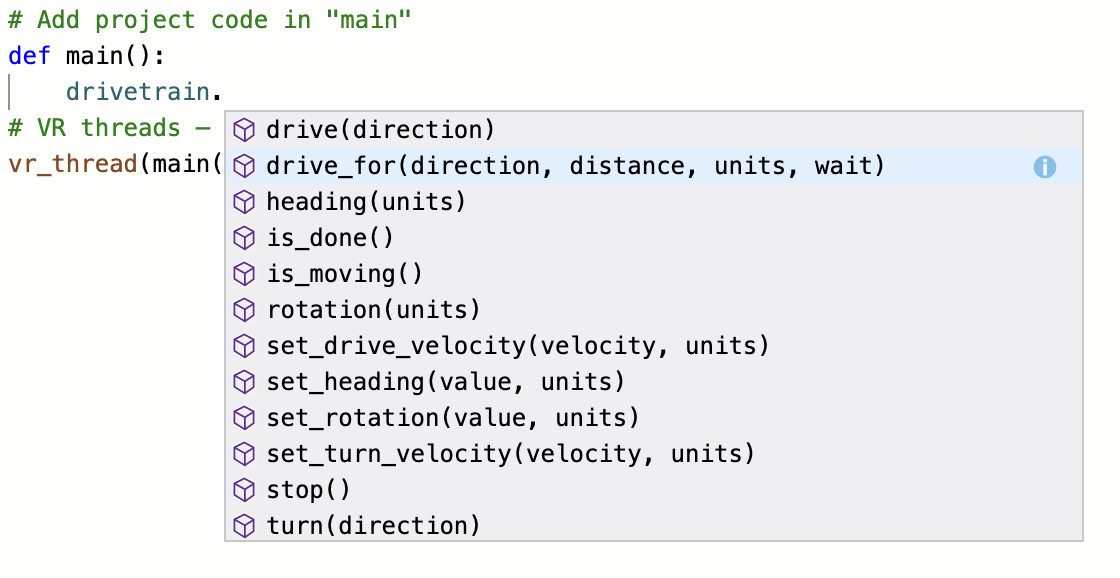
ध्यान दें, drive_forकमांड पहले से ही प्रोजेक्ट में, नए प्रोजेक्ट टेम्पलेट के भाग के रूप में मौजूद है। यदि यह पहले से ही आपके प्रोजेक्ट में नहीं है, तोdrive_forकमांड को कार्यक्षेत्र में खींचें और मुख्य परिभाषा के नीचे रखें।
# "main" में प्रोजेक्ट कोड जोड़ें def main(): drivetrain.drive_for(FORWARD, 200, MM) - या, कार्यक्षेत्र में कमांड टाइप करना शुरू करें। स्वतः पूर्ण कार्यक्षमता कमांड टाइप करते समय त्रुटियों को रोकने में मदद करेगी।
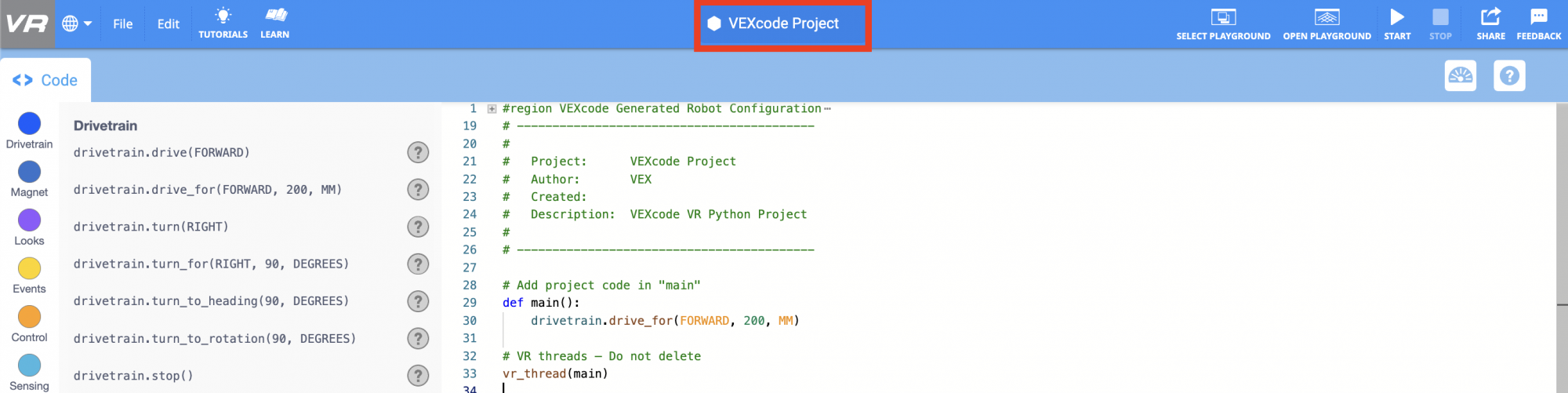
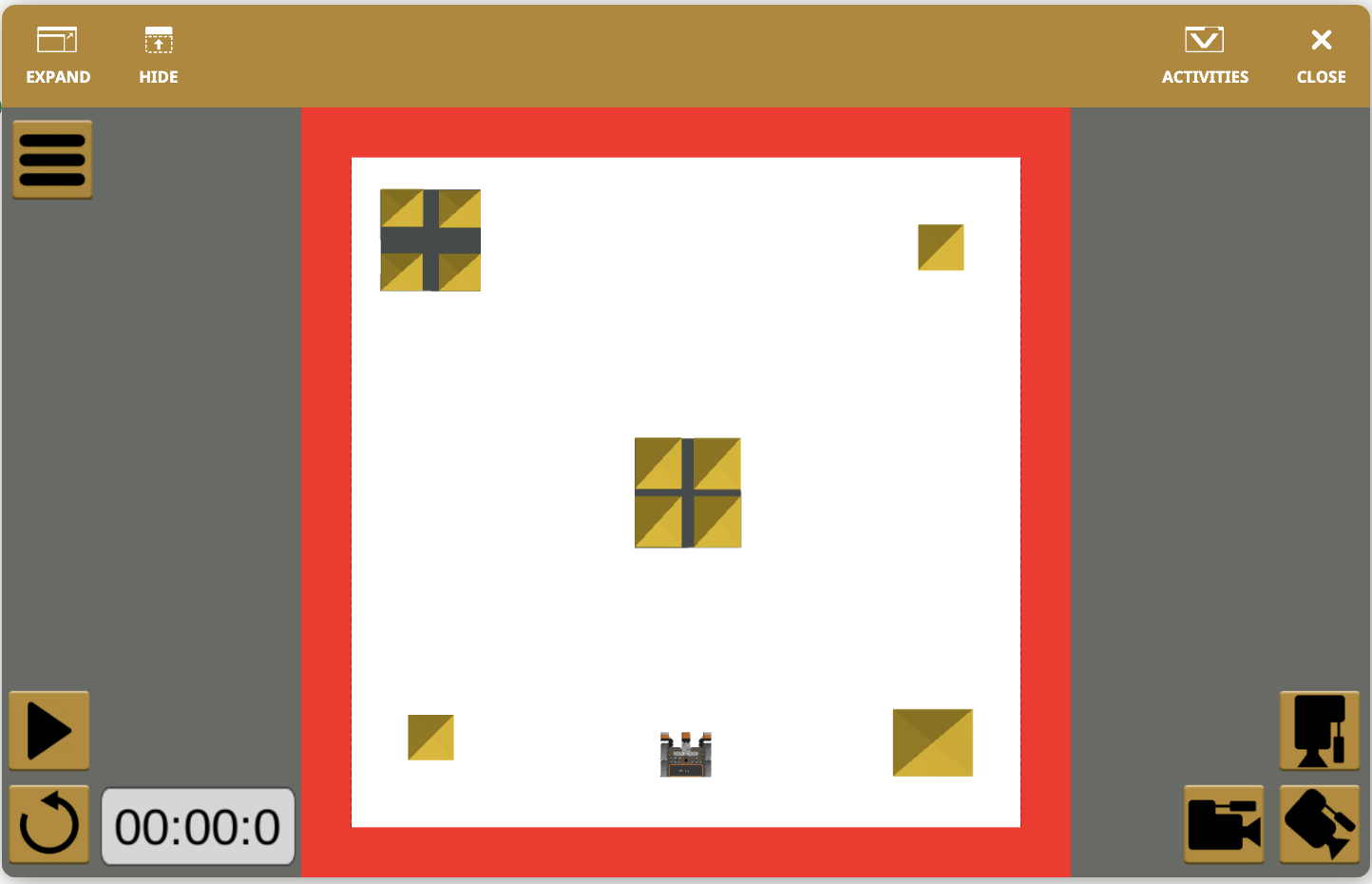
- यदि प्लेग्राउंड विंडो पहले से खुली नहीं है तो उसे खोलने के लिए “ओपन प्लेग्राउंड” बटन का चयन करें।

- यह सुनिश्चित करने के लिए जांचें कि कैसल क्रैशर खेल का मैदान खुला है।
- यदि कोई भिन्न खेल का मैदान खुलता है, तो खेल के मैदान को कैसल क्रैशरमें बदलें। खेल के मैदान बदलने के लिए, 'खेल के मैदान का चयन करें' बटन का चयन करें।

- कैसल क्रैशर खेल का मैदान चुनें.
- प्रोजेक्ट का परीक्षण करने के लिए “प्रारंभ” बटन का चयन करें।

- वीआर रोबोट कैसल क्रैशर प्लेग्राउंडपर 200 मिलीमीटर (मिमी) तक आगे बढ़ेगा। ध्यान दें कि वी.आर. रोबोट ने केन्द्रीय महल को नहीं छुआ। drive_for कमांड में पैरामीटर्स को समायोजित करने की आवश्यकता है ताकि VR रोबोट आगे ड्राइव कर सके।
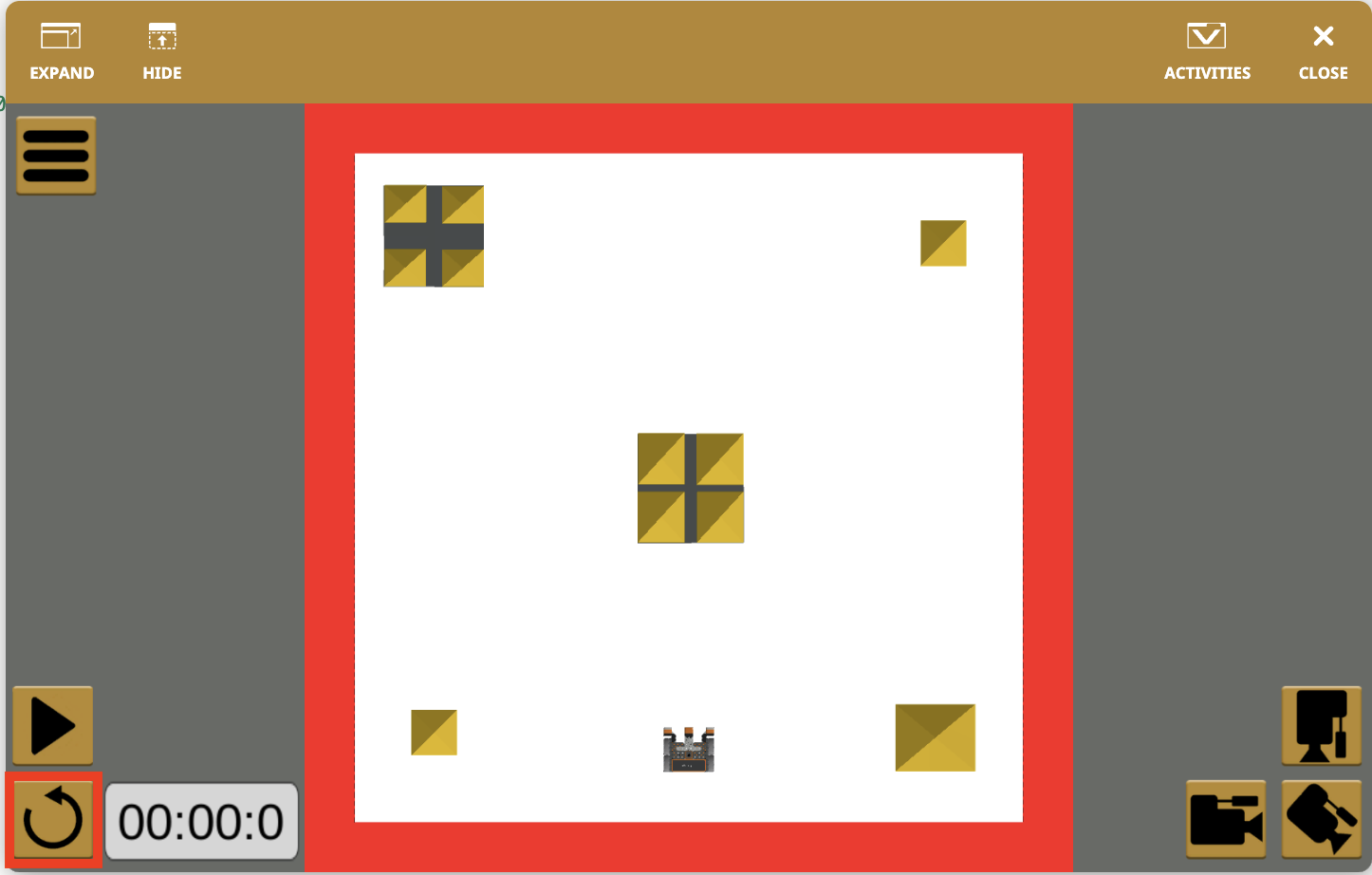
- खेल के मैदान को रीसेट करने और वीआर रोबोट को प्रारंभिक स्थिति में वापस ले जाने के लिए "रीसेट" बटन का चयन करें।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।