
Lección 2: Conducir a distancia: avanzar y retroceder
¡En esta lección, crearás un proyecto que utiliza comandos de transmisión para derribar el primer castillo en el Castle Crasher Playground!
Resultados de aprendizaje
- Identifique cómo utilizar el comando drive_for para conducir el robot VR una distancia específica.
- Identifique cómo cambiar el parámetro en el comando drive_for para mover el robot VR hacia adelante y hacia atrás.
- Identifique cómo utilizar el comando set_drive_velocity para establecer la velocidad del tren motriz.
- Identifique el rango de valores utilizados en el comando set_drive_velocity .
Crear un nuevo proyecto
Se debe crear un nuevo proyecto de texto para que el robot de realidad virtual avance para chocar con el primer castillo en el Castle Crasher Playground, y luego conducir en reversa para volver a la posición inicial.
Sigue estos pasos para crear un nuevo proyecto de texto en Python.
- Inicie VEXcode VR en vr.vex.com.
- Una vez que inicie VEXcode VR, seleccione "Archivo", luego "Nuevo proyecto de texto".

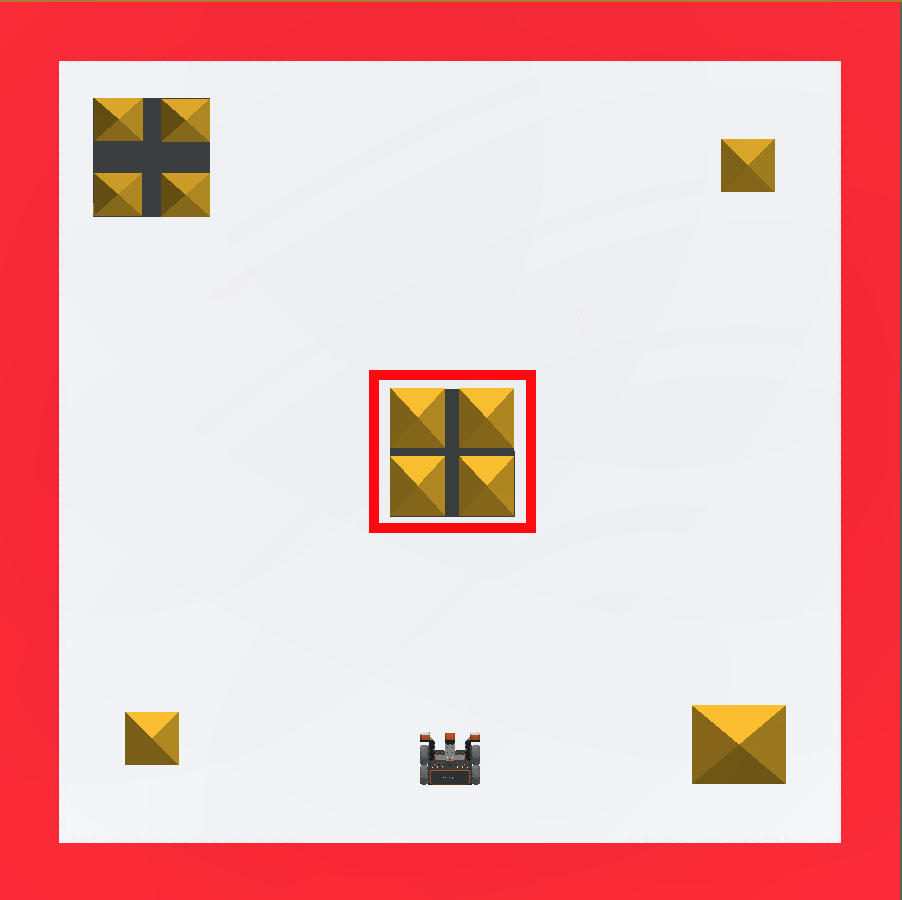
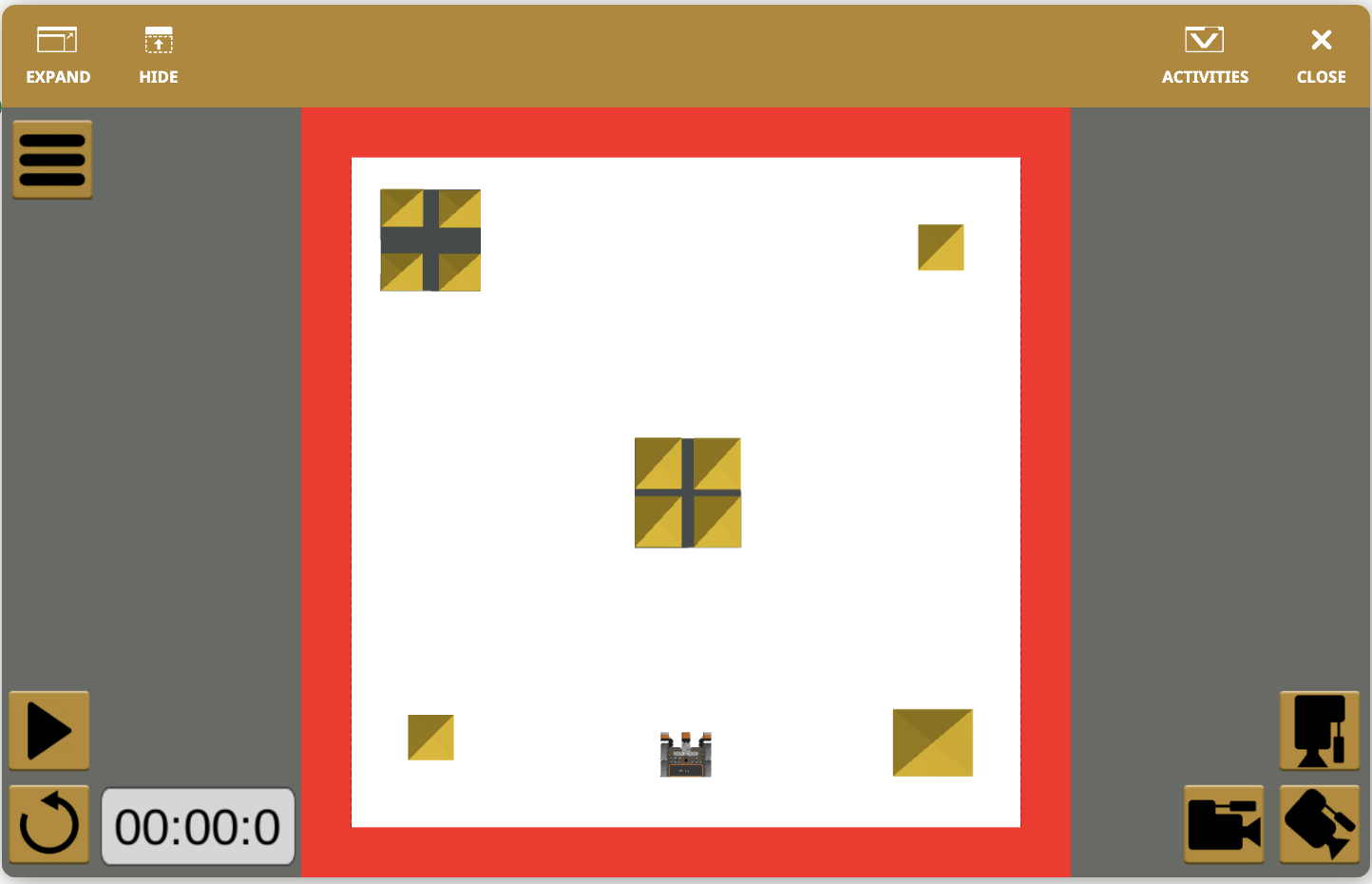
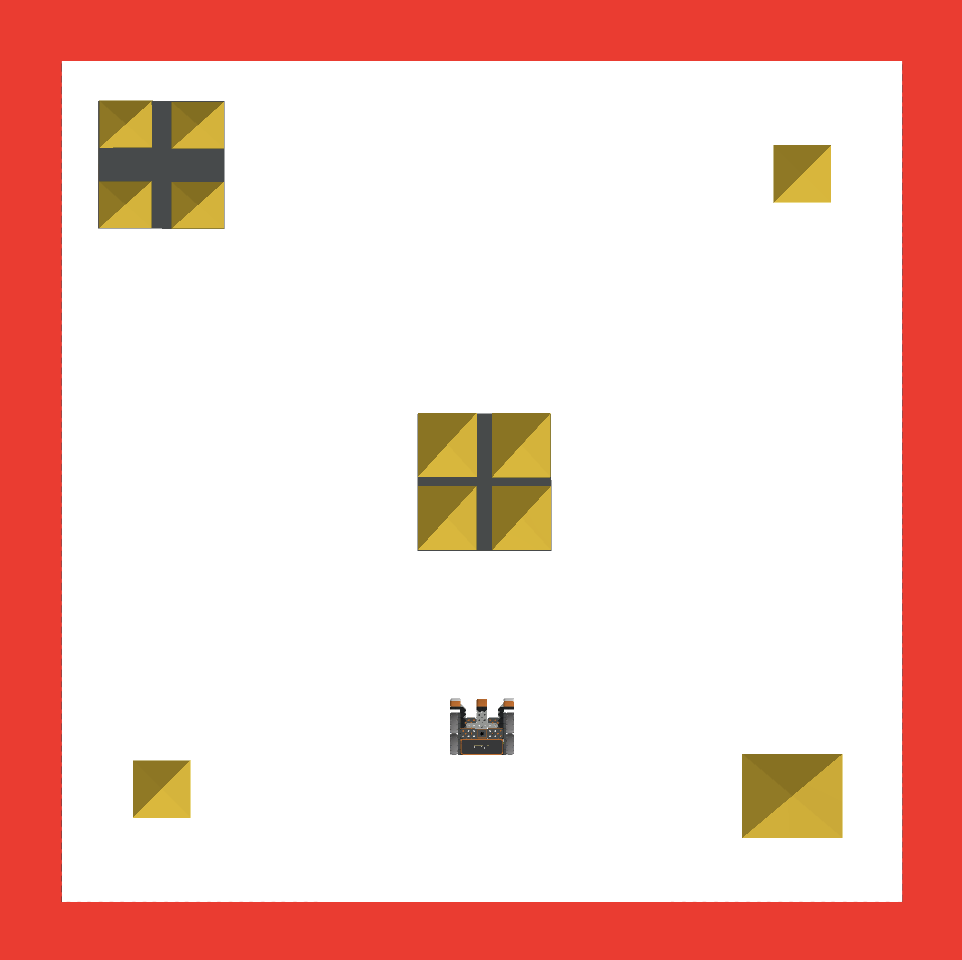
- Se le pedirá que elija un patio de recreo de Python. Selecciona el Castle Crasher Playground.
Ponle un nombre a tu proyecto
- Para nombrar su proyecto, seleccione el cuadro de nombre del proyecto.
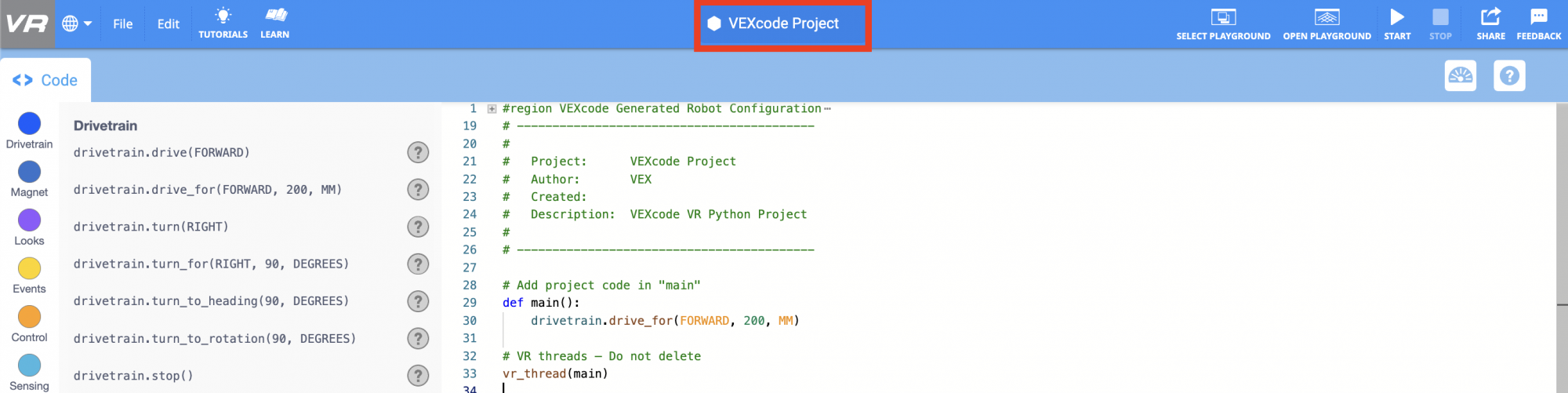
- Introduzca el nuevo nombre del proyectoUnit2Lesson2 y seleccione "Guardar".

Conducir hacia adelante y hacia atrás
Utilice el comando drive_for para programar el Robot VR para que avance y derribe el primer castillo en el Castle Crasher Playground.
-
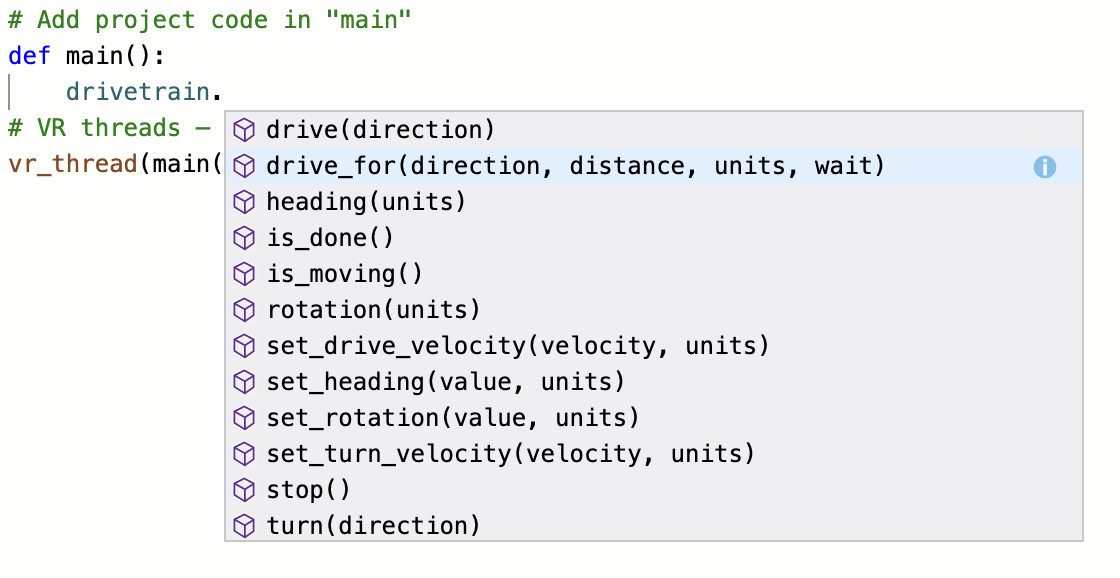
Tenga en cuenta que el comando drive_for ya está en el proyecto, como parte de la nueva plantilla de proyecto. Si aún no está en su proyecto, arrastre el comando drive_for al espacio de trabajo y colóquelo debajo de la definición principal.
# Añadir código de proyecto en "main" def main(): drivetrain.drive_for(FORWARD, 200, MM) - O bien, comience a escribir el comando en el área de trabajo. La funcionalidad de autocompletar ayudará a evitar errores al escribir comandos.
- Seleccione el botón "Abrir patio de recreo" para abrir la ventana del patio de recreo si aún no está abierta.

- Compruebe que el Castle Crasher Playground esté abierto.
- Si se abre un patio de recreo diferente, cambie el patio de recreo a Castle Crasher. Para cambiar los patios de recreo, seleccione el botón "Seleccionar patio de recreo".

- Selecciona el Castle Crasher Playground.
- Seleccione el botón "Iniciar" para probar el proyecto.

- El VR Robot avanzará 200 milímetros (mm) en el Castle Crasher Playground. Ten en cuenta que el robot VR no tocó el castillo central. Los parámetros en el drive_for deben ajustarse para que el robot VR pueda avanzar más.
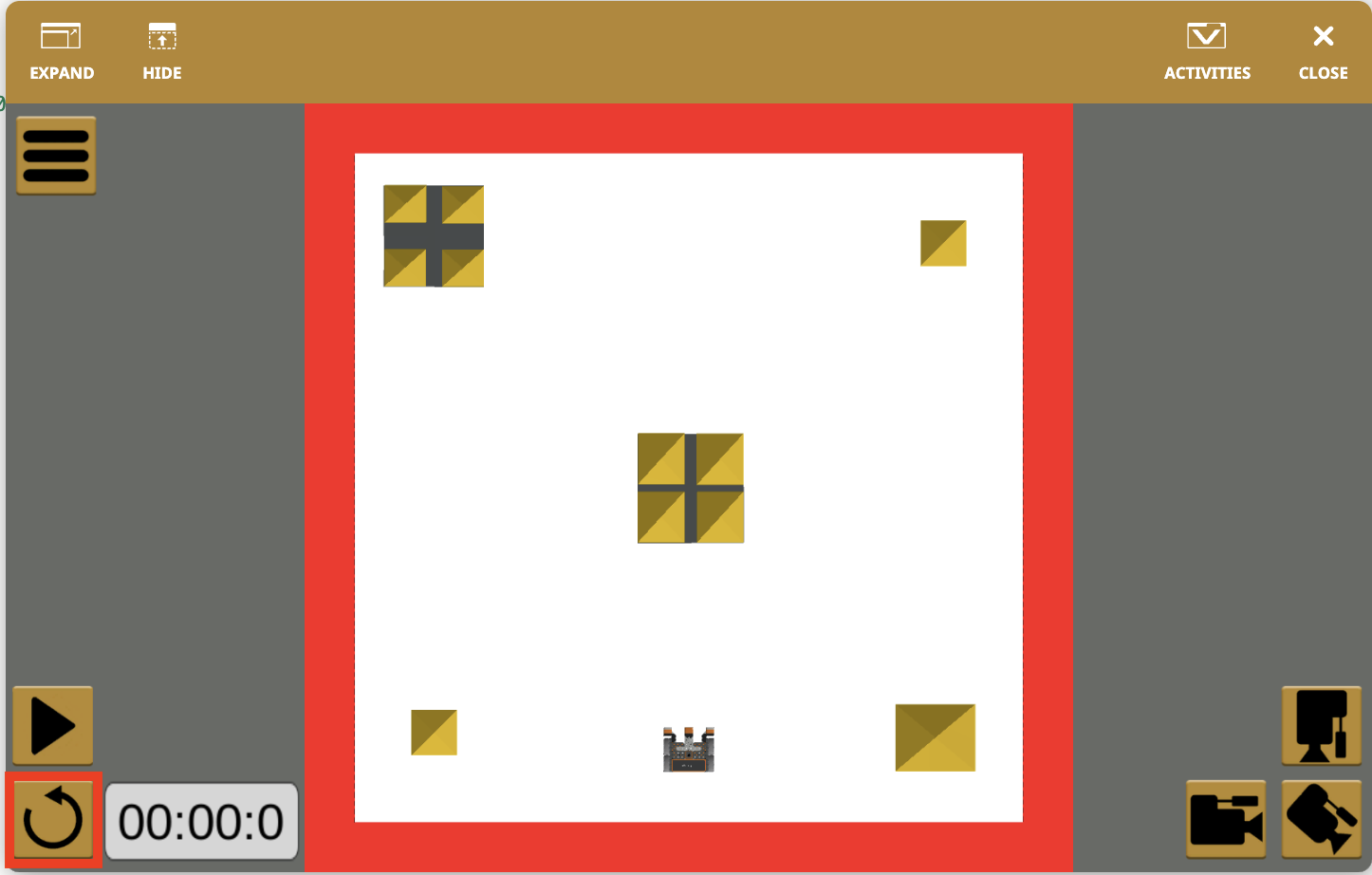
- Seleccione el botón "Restablecer" para restablecer el patio de recreo y mover el robot VR de nuevo a la posición inicial.
Seleccione el botón Siguiente para continuar con el resto de esta lección.