
في هذا الدرس، ستتعرف على تدبير آخر مهم للسلامة يمنع الحوادث ويضمن سلامة العمال، وهو التوقف في حالات الطوارئ.
سوف تتعلم:
- ما هو التوقف في حالات الطوارئ، وما هو الغرض منه.
- الفرق بين التوقفات المسيطر عليها وغير المسيطر عليها.
- آليات ومعايير السلامة الأخرى في الروبوتات الصناعية.
- كيفية عمل نقطة التوقف التي يتم التحكم فيها في خلية عمل CTE.
في نهاية هذا الدرس، ستقوم بمراجعة ما تعلمته أثناء إجابتك على الأسئلة في دفتر ملاحظاتك الهندسية.
التوقف في حالات الطوارئ
التوقف في حالات الطوارئ، المعروف أيضًا باسم التوقف الإلكتروني، هو آلية سلامة حيوية مصممة للحفاظ على العمال والمعدات في مأمن من الأذى في حالة وجود موقف خطير. تعتبر المحطات الإلكترونية قياسية في جميع أنحاء الأتمتة الصناعية، وهي مصممة لإيقاف العمليات الروبوتية بسرعة في حالات الطوارئ، ومنع إصابات العمال وحماية المعدات. يتم تشغيل الإيقاف الإلكتروني من خلال إجراء واحد، مثل زر الضغط. بمجرد بدء التوقف الإلكتروني، يجب على المشغل التصرف عن قصد من أجل إعادة تشغيل العمليات بأمان.

في الروبوتات الصناعية، يمكن بدء التوقف في حالات الطوارئ في مجموعة متنوعة من الظروف. على سبيل المثال، يمكن أن يشكل عطل في المحرك أو خطأ في البرمجة خطرًا على المعدات أو الموظفين. عند اكتشاف الخطأ، يمكن أن يبدأ عامل التوقف الإلكتروني، ويخبر خلية العمل بإيقاف العمليات. تشمل الحالات الأخرى التي يمكن فيها تنشيط المحطات الإلكترونية مخاطر غير متوقعة، مثل:
- الحرائق.
- عامل يخطو في طريق ذراع روبوتية.
- انسداد يقع في نطاق الذراع الروبوتية مما يجعل الاصطدام محتملاً.
يمكن أن يؤدي تشغيل الإيقاف الإلكتروني إلى منع إلحاق الضرر بالعمال والمساعدة في تجنب الأضرار الباهظة الثمن.
الإيقاف المتحكم به مقابل الإيقاف غير المتحكم به
هناك فئتان من نقاط التوقف في حالات الطوارئ: التي يتم التحكم فيها، والتي لا يتم التحكم فيها. يعتمد استخدام التوقف المسيطر عليه أو غير المسيطر عليه على الموقف. ينحدر التوقف المتحكم فيه تدريجيًا ولكنه لا يزيل الطاقة بالكامل عن الماكينات. على سبيل المثال، إذا تم وضع العمال تحت هيكل سيارة ثقيل على خط تجميع، وتم تشغيل توقف طارئ بسبب إعاقة ذراع روبوت، فسيتم استخدام توقف متحكم فيه. وهذا من شأنه أن يبطئ تدريجياً أي حركة، مما يسمح للآلات بالتوقف بسلاسة، مما يمنح العمال الوقت للابتعاد عن الطريق.
يؤدي التوقف غير المنضبط على الفور إلى إزالة كل الطاقة عن الماكينات. في مثال هيكل السيارة، قد تؤدي إزالة كل الطاقة إلى سقوط الهيكل على العمال أدناه. ومع ذلك، في حالة حدوث حريق كهربائي، سيتم استخدام توقف غير منضبط، لأنه سيقطع كل الطاقة عن الماكينة على الفور.
معايير التوقف في حالات الطوارئ في مجال الروبوتات الصناعية
تحكم المعايير والقوانين على مستوى الصناعة استخدام المحطات الإلكترونية في الروبوتات الصناعية، مما يساعد على ضمان مستوى عالٍ من سلامة العمال في جميع أنحاء الصناعة. وتشمل بعض هذه الهيئات المعنية بالمعايير ما يلي:
- جمعية صناعة الروبوتات (RIA): الجمعية التي تضع معايير السلامة للروبوتات الصناعية.
- المعهد الوطني الأمريكي للمعايير (ANSI): معهد يحافظ على معايير السلامة في مكان العمل في الولايات المتحدة.
- المنظمة الدولية للتوحيد القياسي (ISO): منظمة تحافظ على المعايير الدولية للسلامة في مكان العمل.
- إدارة السلامة والصحة المهنية (OSHA): الإدارة الفيدرالية التي تضع وتنفذ لوائح السلامة في مكان العمل.
تشمل أنواع التوحيد القياسي نوع الآلية المستخدمة لتشغيل الإيقاف الإلكتروني ولون الآلية وموضع الآلية. على سبيل المثال، يجب أن تكون المحطات الإلكترونية ملونة بالأحمر والأصفر، للحصول على رؤية عالية. يجب أن تتطلب إجراءً واحدًا فقط من أجل بدء تشغيلها، ويجب وضعها بعيدًا عن متناول الذراع الروبوتية، لذلك لا يحتاج العمال إلى العبور إلى طريق الأذى لتنشيطها. كما يجب وضعها في موقع يسهل على المشغلين الوصول إليه. هذه ليست سوى عدد قليل من المعايير المعمول بها للحفاظ على سلامة العمال عند استخدام المحطات الإلكترونية.

آليات السلامة الأخرى
تُستخدم العديد من الأجهزة الأخرى للمساعدة في ضمان سلامة مشغلي الروبوتات الصناعية. غالبًا ما يتم استخدام آليات السلامة جنبًا إلى جنب مع بعضها البعض. تستخدم البيئات الصناعية في العالم الحقيقي مجموعة متنوعة من أجهزة السلامة والآليات والاحتياطات من أجل ضمان سلامة العمال، بما في ذلك:
-
حواجز السلامة والحراس: الحواجز المادية التي تفصل الروبوتات عن العمال البشريين لمنع الاتصال العرضي. وتشمل هذه الأسوار والأقفاص وغيرها من الهياكل المصممة لتقييد الوصول إلى المناطق الخطرة.
-
أجهزة استشعار الوجود: أجهزة استشعار تكتشف وجود البشر أو الأشياء داخل منطقة محددة. يمكن أن يوقف ذلك تشغيل الروبوت إذا تم اكتشاف اختراق.
-
أذرع الاستشعار: أذرع روبوتية مجهزة بأجهزة استشعار للكشف عن ملامسة البشر أو الأشياء. يمكن أن تؤدي هذه المستشعرات إلى إيقاف تشغيل الروبوت أو إبطائه لمنع الإصابة أو التلف.
-
حصيرة الضغط: الحصائر الموضوعة على الأرض حول الروبوت والتي تكتشف الضغط أو الوزن. إذا داس شخص على البساط، سيتوقف الروبوت عن العمل لمنع الحوادث.
-
الإنذارات: أنظمة الإنذار المسموعة والمرئية التي تنبه العمال إلى وجود روبوت نشط أو حالة غير آمنة. يمكن تشغيل هذه الإنذارات بواسطة أنظمة السلامة المختلفة أو يدويًا بواسطة المشغلين.
-
الستائر الخفيفة: صفائف من العوارض الضوئية التي تخلق حاجزًا غير مرئي حول المناطق الخطرة. في حالة انقطاع أي شعاع، يتم إيقاف الروبوت على الفور لضمان سلامة الموظفين.
الإيقاف المتحكم به في خلية عمل CTE
في خلية عمل CTE، يمكن أن يؤدي الزر الموجود أعلى برج الإشارة إلى إيقاف متحكم فيه عند الضغط عليه.
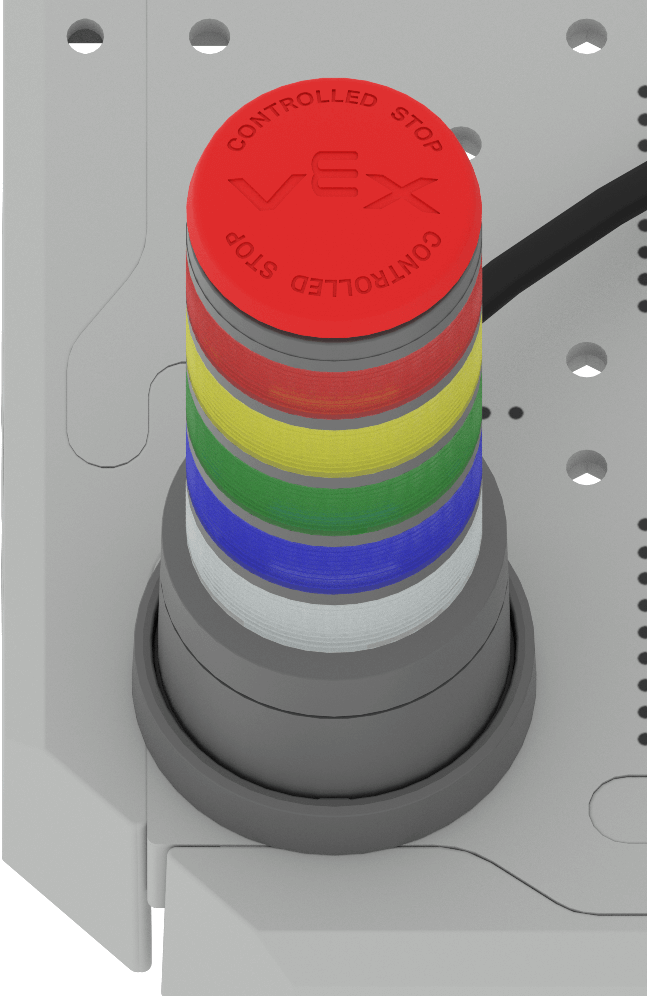
ستلاحظ أن الزر يقول "إيقاف متحكم به" على السطح. عند ترميزه ليكون بمثابة توقف متحكم فيه، يمكن الضغط على الزر إذا كان أي مكون من مكونات خلية العمل يتحرك بطريقة تضر به أو بالمستخدم.
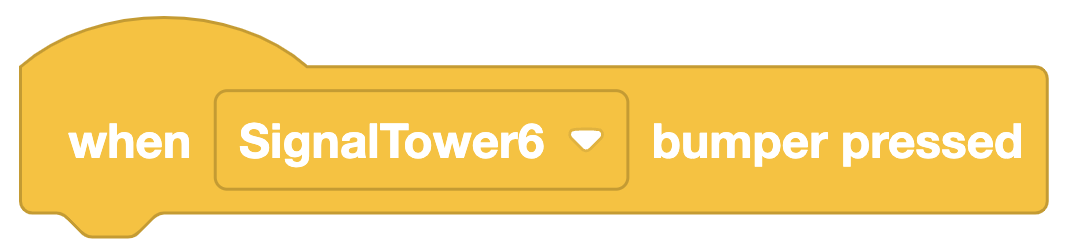
يتم استخدام كتلة? عند الضغط على مصد برج الإشارة لترميز وظيفة الإيقاف المتحكم فيه.
هناك كومة من الكتل في مشروع Brain CTE 6 - Axis Arm Template الذي يتيح وظائف الإيقاف المتحكم بها. ستتعلم المزيد حول ترميز برج الإشارة في الدرس التالي.
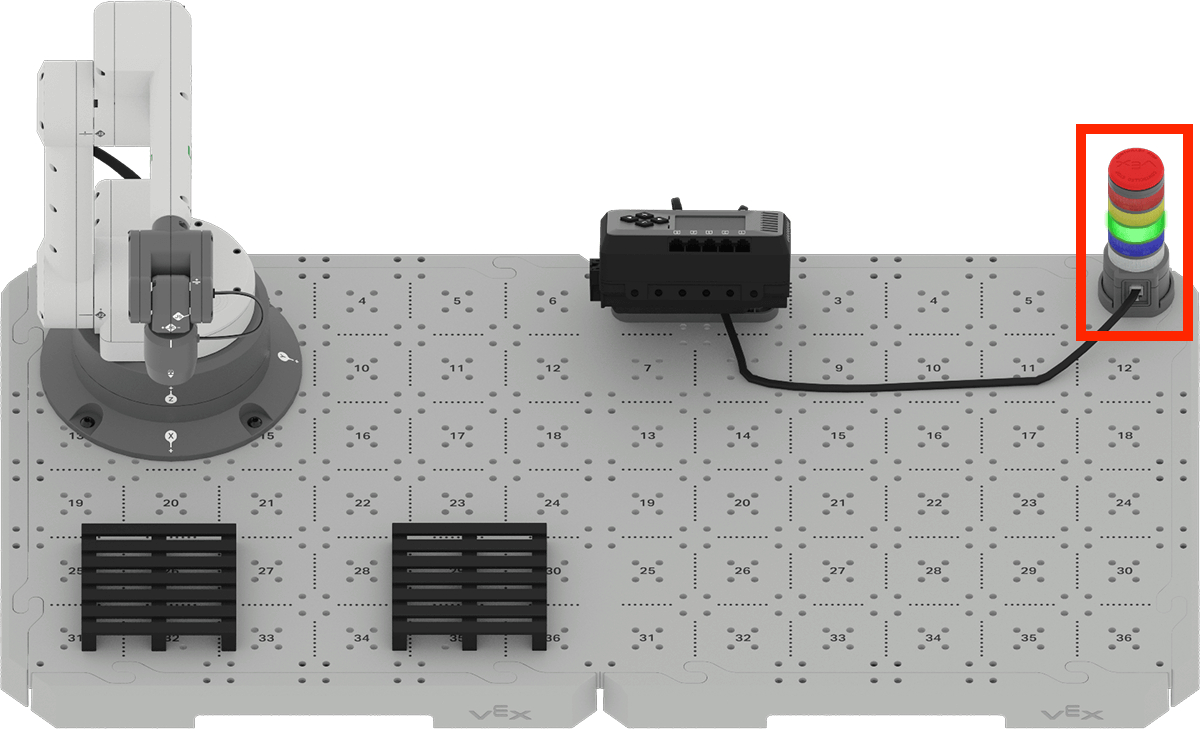
ستلاحظ أن برج الإشارة على المبنى الخاص بك يقع خارج مسار ذراع 6 محاور، بحيث يمكن الضغط عليه بسهولة بطريقة آمنة إذا لزم الأمر.
تحقق من فهمك
قبل الانتقال إلى الدرس التالي، تأكد من فهمك للمفاهيم التي يغطيها هذا الدرس من خلال الإجابة على الأسئلة الواردة في المستند أدناه في دفترك الهندسي.
تحقق من فهمك للأسئلة > (Google Doc / .docx / .pdf)
اختر التالي > للانتقال إلى الدرس التالي.