
In questa lezione, imparerai a conoscere un'altra importante misura di sicurezza che previene gli incidenti e garantisce la sicurezza dei lavoratori, l'arresto di emergenza.
Imparerai:
- Cos' è un arresto di emergenza e a cosa serve.
- La differenza tra arresti controllati e non controllati.
- Altri meccanismi e standard di sicurezza nella robotica industriale.
- Come funziona l'arresto controllato sulla CTE Workcell.
Alla fine di questa lezione, rivedrai ciò che hai imparato rispondendo alle domande nel tuo quaderno di ingegneria.
Arresti di emergenza
Un arresto di emergenza, noto anche come e-stop, è un meccanismo di sicurezza vitale progettato per proteggere i lavoratori e le attrezzature da danni in caso di situazione pericolosa. Gli arresti di emergenza sono standard in tutta l'automazione industriale e sono progettati per arrestare rapidamente le operazioni robotiche in caso di emergenza, prevenendo lesioni ai lavoratori e salvaguardando le attrezzature. Un e-stop viene attivato da una singola azione, come un pulsante. Una volta avviato un e-stop, un operatore deve agire intenzionalmente per riavviare in sicurezza le operazioni.

Nella robotica industriale, gli arresti di emergenza possono essere avviati in una varietà di circostanze. Ad esempio, un guasto al motore o un errore di programmazione potrebbero rappresentare un rischio per le apparecchiature o il personale. Quando viene rilevato l'errore, un lavoratore potrebbe avviare un arresto elettronico, dicendo alla cella di lavoro di cessare le operazioni. Altri casi in cui gli e-stop potrebbero essere attivati includono pericoli imprevisti, come ad esempio:
- incendi.
- un operaio che entra nel percorso di un braccio robotico.
- un'ostruzione che cade nel raggio d'azione di un braccio robotico rendendo probabile una collisione.
L'attivazione di un e-stop può prevenire danni ai lavoratori e contribuire a evitare danni costosi.
Fermate controllate vs. Fermate non controllate
Esistono due categorie di arresti di emergenza: controllati e non controllati. L'uso di un arresto controllato o non controllato dipende dalla situazione. Un arresto controllato si abbassa gradualmente ma non toglie completamente l'alimentazione alle macchine. Ad esempio, se i lavoratori fossero posizionati sotto un pesante telaio di un'auto su una catena di montaggio e venisse attivato un arresto di emergenza a causa di un'ostruzione di un braccio robotico, verrebbe utilizzato un arresto controllato. Ciò rallenterebbe gradualmente qualsiasi movimento, consentendo alla macchina di fermarsi senza intoppi, dando ai lavoratori il tempo di togliersi di mezzo.
Un arresto incontrollato toglie immediatamente tutta l'alimentazione alle macchine. Nell'esempio del telaio dell'auto, la rimozione di tutta l'alimentazione potrebbe causare la caduta del telaio sui lavoratori sottostanti. Tuttavia, in un evento come un incendio elettrico, verrebbe utilizzato un arresto incontrollato, in quanto interromperebbe immediatamente tutta l'alimentazione alla macchina.
Norme per gli arresti di emergenza nella robotica industriale
Gli standard e le leggi del settore regolano l'uso degli e-stop nella robotica industriale, contribuendo a garantire un elevato standard di sicurezza dei lavoratori in tutto il settore. Alcuni di questi organismi di normazione includono:
- Robotic Industry Association (RIA): l'associazione che stabilisce gli standard di sicurezza per i robot industriali.
- American National Standards Institute (ANSI): Un istituto che mantiene gli standard per la sicurezza sul lavoro negli Stati Uniti.
- Organizzazione internazionale per la standardizzazione (ISO): un'organizzazione che mantiene gli standard internazionali per la sicurezza sul lavoro.
- Amministrazione per la sicurezza e la salute sul lavoro (OSHA): l'amministrazione federale che stabilisce e applica le norme di sicurezza sul posto di lavoro.
I tipi di standardizzazione includono il tipo di meccanismo utilizzato per attivare un arresto di emergenza, il colore del meccanismo e il posizionamento del meccanismo. Ad esempio, gli e-stop dovrebbero essere colorati in rosso e giallo, per un'alta visibilità. Dovrebbero richiedere una sola azione per avviarli e dovrebbero essere posizionati al di fuori della portata di un braccio robotico, in modo che i lavoratori non debbano attraversare la strada del pericolo per attivarli. Devono inoltre essere collocati in un luogo facilmente accessibile agli operatori. Questi sono solo alcuni degli standard in atto per mantenere i lavoratori al sicuro quando utilizzano gli e-stop.

Altri meccanismi di sicurezza
Molti altri dispositivi vengono utilizzati per contribuire a garantire la sicurezza degli operatori di robot industriali. I meccanismi di sicurezza sono spesso utilizzati in combinazione tra loro. Gli ambienti industriali del mondo reale utilizzano una varietà di dispositivi di sicurezza, meccanismi e precauzioni al fine di garantire la sicurezza dei lavoratori, tra cui:
-
Barriere e ripari di sicurezza: barriere fisiche che separano i robot dai lavoratori umani per evitare contatti accidentali. Questi includono recinzioni, gabbie e altre strutture progettate per limitare l'accesso alle aree pericolose.
-
Dispositivi di rilevamento della presenza: sensori che rilevano la presenza di esseri umani o oggetti all'interno di un'area specificata. Questi possono interrompere il funzionamento del robot se viene rilevata un'intrusione.
-
Bracci Sensori: bracci robotici dotati di sensori per rilevare il contatto con esseri umani o oggetti. Questi sensori possono attivare uno spegnimento o rallentare il robot per evitare lesioni o danni.
-
Tappetini a pressione: tappetini posizionati sul pavimento intorno al robot che rilevano la pressione o il peso. Se una persona calpesta il tappetino, il robot smetterà di funzionare per evitare incidenti.
-
Allarmi: Sistemi di segnalazione acustica e visiva che avvisano i lavoratori della presenza di un robot attivo o di una condizione non sicura. Questi allarmi possono essere attivati da vari sistemi di sicurezza o manualmente dagli operatori.
-
Barriere fotoelettriche: gruppi di fasci di luce che creano una barriera invisibile intorno alle aree pericolose. In caso di interruzione di un raggio, il robot viene arrestato immediatamente per garantire la sicurezza del personale.
L'arresto controllato sulla cella di lavoro CTE
Sulla CTE Workcell, un pulsante sulla parte superiore della Signal Tower può attivare un arresto controllato quando viene premuto.
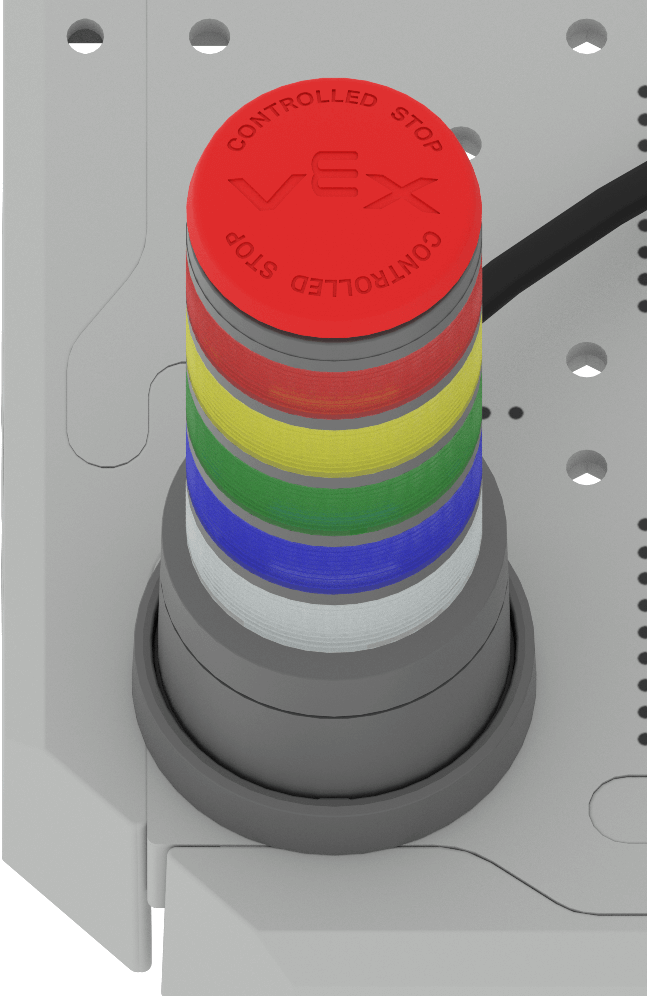
Noterai che il pulsante dice "Arresto controllato" sulla superficie. Se codificato per fungere da arresto controllato, il pulsante può essere premuto se qualsiasi componente della cella di lavoro si muove in modo dannoso per se stesso o per l'utente.
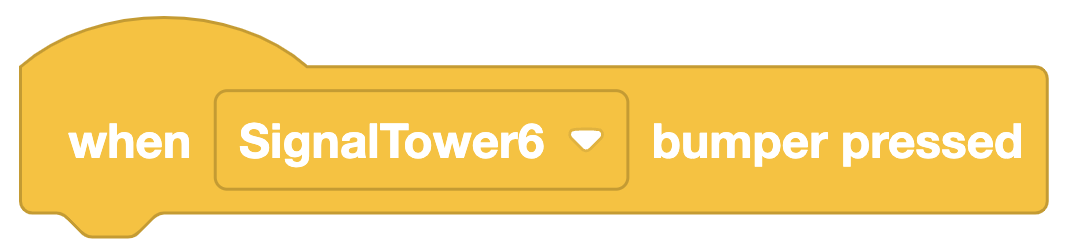
Il blocco When signal tower bumper pressed? viene utilizzato per codificare la funzionalità di arresto controllato.
C'è una pila di blocchi nel progetto Brain CTE 6-Axis Arm Template che consente la funzionalità di arresto controllato. Imparerai di più sulla codifica della Signal Tower nella prossima lezione.
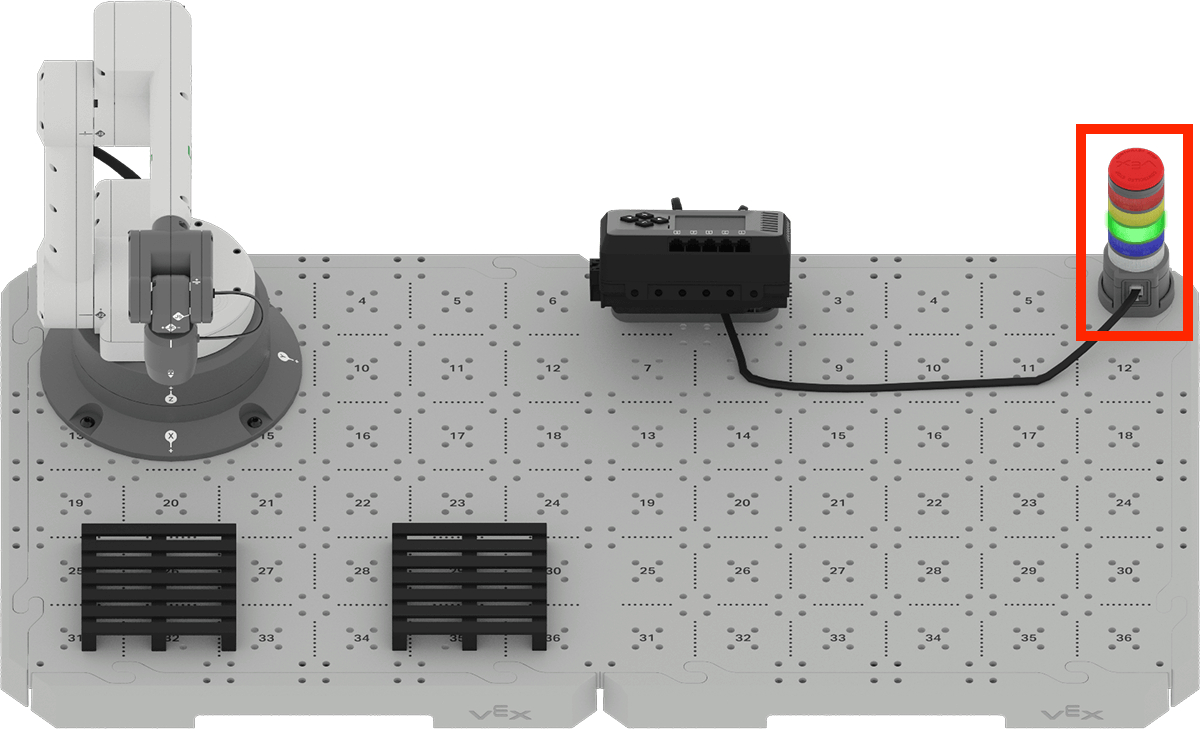
Noterai che la Torre di segnalazione sulla tua build si trova fuori dal percorso del Braccio a 6 assi, in modo che possa essere facilmente premuta in modo sicuro, se necessario.
Verifica la tua comprensione
Prima di passare alla lezione successiva, assicurati di comprendere i concetti trattati in questa lezione rispondendo alle domande nel documento seguente nel tuo quaderno di ingegneria.
Domande sulla comprensione > (Google Doc / .docx / .pdf)
Seleziona Avanti > per passare alla lezione successiva.