
Dans cette leçon, vous découvrirez une autre mesure de sécurité importante qui prévient les accidents et assure la sécurité des travailleurs, l'arrêt d'urgence.
Vous apprendrez :
- Qu'est-ce qu'un arrêt d'urgence et à quoi sert-il ?
- La différence entre les arrêts contrôlés et non contrôlés.
- Autres mécanismes et normes de sécurité en robotique industrielle.
- Fonctionnement de l'arrêt contrôlé sur la cellule de travail CTE.
À la fin de cette leçon, vous passerez en revue ce que vous avez appris en répondant aux questions de votre cahier d'ingénierie.
Arrêts d'urgence
Un arrêt d'urgence, également connu sous le nom d'e-stop, est un mécanisme de sécurité essentiel conçu pour protéger les travailleurs et les équipements en cas de situation dangereuse. Les arrêts d'urgence sont standard dans toute l'automatisation industrielle et sont conçus pour arrêter rapidement les opérations robotiques en cas d'urgence, prévenir les blessures des travailleurs et protéger les équipements. Un arrêt d'urgence est déclenché par une seule action, telle qu'un bouton-poussoir. Une fois qu'un arrêt d'urgence a été lancé, un opérateur doit agir intentionnellement afin de redémarrer les opérations en toute sécurité.

En robotique industrielle, les arrêts d'urgence peuvent être déclenchés dans diverses circonstances. Par exemple, une panne de moteur ou une erreur de programmation pourrait présenter un risque pour l'équipement ou le personnel. Lorsque l'erreur est détectée, un e-stop peut être initié par un travailleur, indiquant à la cellule de travail de cesser les opérations. D'autres cas où les arrêts électroniques pourraient être activés comprennent des dangers imprévus, tels que :
- incendies.
- un ouvrier marchant sur le chemin d'un bras robotisé.
- une obstruction tombant dans la portée d'un bras robotisé rendant probable une collision.
Le déclenchement d'un arrêt d'urgence peut prévenir les dommages aux travailleurs et aider à éviter des dommages coûteux.
Arrêts contrôlés vs arrêts non contrôlés
Il existe deux catégories d'arrêts d'urgence : contrôlés et non contrôlés. L'utilisation d'un arrêt contrôlé ou non contrôlé dépend de la situation. Un arrêt contrôlé diminue progressivement mais ne coupe pas complètement l'alimentation des machines. Par exemple, si des travailleurs étaient positionnés sous un châssis de voiture lourde sur une chaîne de montage et qu'un arrêt d'urgence était déclenché en raison d'une obstruction d'un bras robotisé, un arrêt contrôlé serait utilisé. Cela ralentirait progressivement tout mouvement, permettant à la machine de s'arrêter en douceur, donnant aux travailleurs le temps de s'écarter.
Un arrêt incontrôlé coupe immédiatement toute alimentation des machines. Dans l'exemple du châssis de la voiture, la suppression de toute alimentation pourrait faire tomber le châssis sur les travailleurs ci-dessous. Cependant, dans un cas comme un incendie électrique, un arrêt incontrôlé serait utilisé, car il couperait immédiatement toute l'alimentation de la machine.
Normes pour les arrêts d'urgence en robotique industrielle
Des normes et des lois à l'échelle de l'industrie régissent l'utilisation des arrêts d'urgence en robotique industrielle, contribuant à assurer un niveau élevé de sécurité des travailleurs dans l'ensemble de l'industrie. Certains de ces organismes de normalisation comprennent :
- Robotic Industry Association (RIA) : L'association qui établit des normes de sécurité pour les robots industriels.
- American National Standards Institute (ANSI) : Un institut qui maintient des normes pour la sécurité au travail aux États-Unis.
- Organisation internationale de normalisation (ISO) : organisation qui maintient les normes internationales en matière de sécurité au travail.
- Administration de la sécurité et de la santé au travail (OSHA) : L'administration fédérale qui établit et applique les règlements de sécurité au travail.
Les types de normalisation comprennent le type de mécanisme utilisé pour déclencher un arrêt d'urgence, la couleur du mécanisme et le positionnement du mécanisme. Par exemple, les arrêts électroniques doivent être de couleur rouge et jaune, pour une grande visibilité. Ils ne devraient nécessiter qu'une seule action pour les initier et devraient être positionnés hors de la portée d'un bras robotique, afin que les travailleurs n'aient pas besoin de traverser pour les activer. Ils doivent également être placés dans un endroit facilement accessible aux opérateurs. Ce ne sont là que quelques-unes des normes en place pour assurer la sécurité des travailleurs lors de l'utilisation des arrêts d'urgence.

Autres mécanismes de sécurité
De nombreux autres dispositifs sont utilisés pour aider à assurer la sécurité des opérateurs de robots industriels. Les mécanismes de sécurité sont souvent utilisés en conjonction les uns avec les autres. Les environnements industriels du monde réel utilisent une variété de dispositifs, de mécanismes et de précautions de sécurité afin d'assurer la sécurité des travailleurs, notamment :
-
Barrières de sécurité et protections : barrières physiques qui séparent les robots des travailleurs humains pour éviter tout contact accidentel. Il s'agit notamment de clôtures, de cages et d'autres structures conçues pour restreindre l'accès aux zones dangereuses.
-
Dispositifs de détection de présence : capteurs qui détectent la présence d'humains ou d'objets dans une zone spécifiée. Ceux-ci peuvent arrêter le fonctionnement du robot si une intrusion est détectée.
-
Bras de capteur : Bras robotisés équipés de capteurs pour détecter le contact avec des humains ou des objets. Ces capteurs peuvent déclencher un arrêt ou ralentir le robot pour éviter les blessures ou les dommages.
-
Tapis de pression : tapis placés sur le sol autour du robot qui détectent la pression ou le poids. Si une personne marche sur le tapis, le robot cessera de fonctionner pour éviter les accidents.
-
Alarmes : systèmes d'avertissement sonore et visuel qui alertent les travailleurs de la présence d'un robot actif ou d'une condition dangereuse. Ces alarmes peuvent être déclenchées par divers systèmes de sécurité ou manuellement par les opérateurs.
-
Rideaux lumineux : réseaux de faisceaux lumineux qui créent une barrière invisible autour des zones dangereuses. Si un faisceau est interrompu, le robot est arrêté immédiatement pour assurer la sécurité du personnel.
L'arrêt contrôlé sur la cellule de travail CTE
Sur la cellule de travail CTE, un bouton sur le dessus de la tour de signalisation peut déclencher un arrêt contrôlé lorsqu'il est enfoncé.
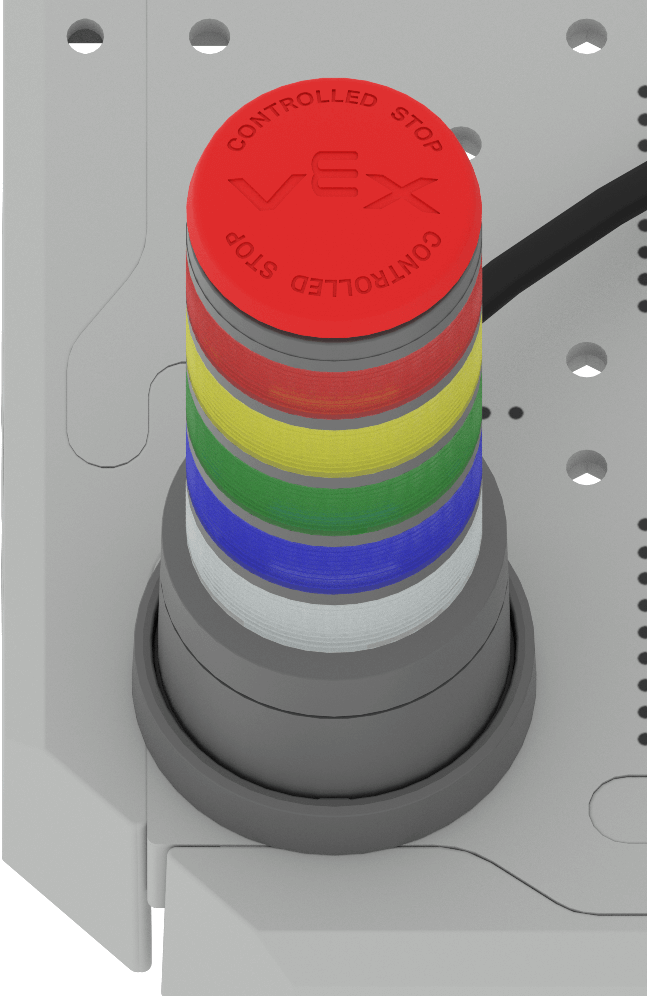
Vous remarquerez que le bouton indique « Arrêt contrôlé » sur la surface. Lorsqu'il est codé pour servir d'arrêt contrôlé, le bouton peut être enfoncé si un composant de la Workcell se déplace d'une manière qui est dommageable pour lui-même ou pour l'utilisateur.
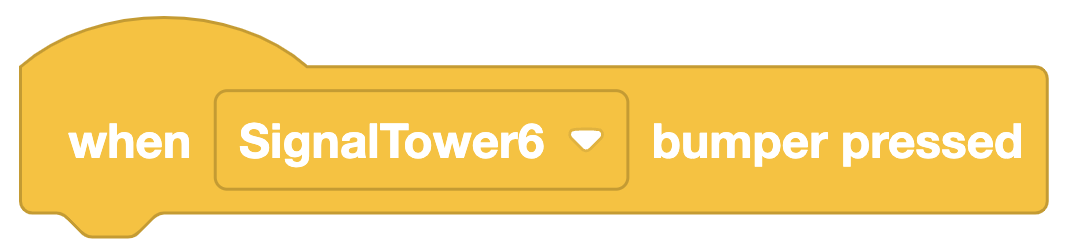
Le bloc Lorsque le pare-chocs de la tour de signalisation est pressé ? est utilisé pour coder la fonctionnalité d'arrêt contrôlé.
Il y a une pile de blocs dans le projet Brain CTE 6-Axis Arm Template qui permet une fonctionnalité d'arrêt contrôlée. Vous en apprendrez plus sur le codage de la tour de signalisation dans la prochaine leçon.
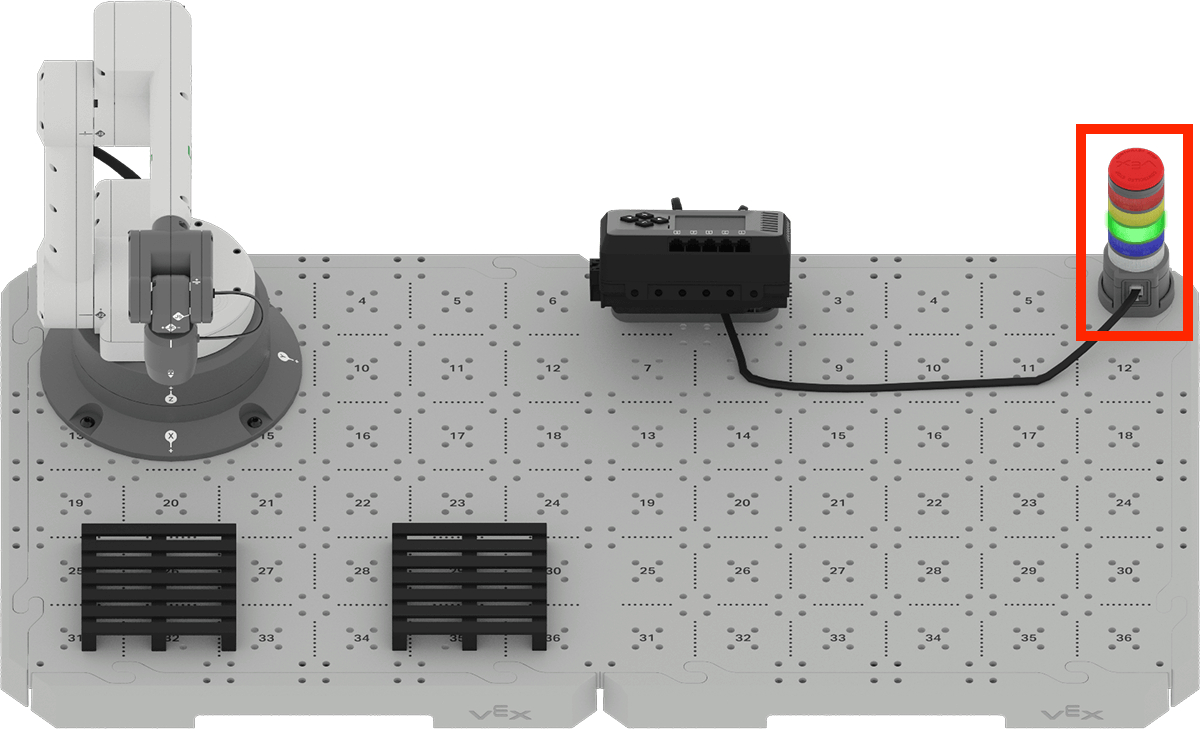
Vous remarquerez que la tour de signalisation de votre construction est située en dehors du chemin du bras à 6 axes, de sorte qu'elle peut être facilement enfoncée en toute sécurité si nécessaire.
Vérifiez votre compréhension
Avant de passer à la leçon suivante, assurez-vous de comprendre les concepts abordés dans cette leçon en répondant aux questions du document ci-dessous dans votre cahier d'ingénierie.
Vérifiez votre compréhension des questions > (Google Doc / .docx / .pdf)
Sélectionnez Suivant > pour passer à la leçon suivante.