
Nesta Lição, você aprenderá sobre outra medida de segurança importante que evita acidentes e garante a segurança do trabalhador, a parada de emergência.
Você aprenderá:
- O que é uma parada de emergência e para que é usada.
- A diferença entre paradas controladas e não controladas.
- Outros mecanismos e normas de segurança em robótica industrial.
- Como funciona a parada controlada na célula de trabalho CTE.
No final desta lição, você analisará o que aprendeu ao responder a perguntas em seu caderno de engenharia.
Paradas de Emergência
Uma parada de emergência, também conhecida como parada de emergência, é um mecanismo de segurança vital projetado para manter os trabalhadores e equipamentos a salvo de danos em caso de uma situação perigosa. As paradas de emergência são padrão em toda a automação industrial e são projetadas para interromper rapidamente as operações robóticas em emergências, evitando ferimentos aos trabalhadores e protegendo equipamentos. Uma parada de emergência é acionada por uma única ação, como um botão de pressão. Uma vez iniciada uma parada de emergência, o operador deve agir intencionalmente para reiniciar as operações com segurança.

Na robótica industrial, as paradas de emergência podem ser iniciadas em uma variedade de circunstâncias. Por exemplo, uma falha do motor ou erro de programação pode representar um risco para o equipamento ou pessoal. Quando o erro é detectado, uma parada de emergência pode ser iniciada por um trabalhador, dizendo à célula de trabalho para cessar as operações. Outros casos em que as paradas eletrônicas podem ser ativadas incluem perigos imprevistos, como:
- incêndios.
- um trabalhador entrando no caminho de um braço robótico.
- uma obstrução que cai no alcance de um braço robótico fazendo uma colisão provável.
Acionar uma parada de emergência pode evitar danos aos trabalhadores e ajudar a evitar danos dispendiosos.
Paradas Controladas vs. Paradas Não Controladas
Existem duas categorias de paradas de emergência: controladas e não controladas. A utilização de uma parada controlada ou não controlada depende da situação. Uma parada controlada diminui gradualmente, mas não remove totalmente a energia das máquinas. Por exemplo, se os trabalhadores estivessem posicionados sob um chassi de carro pesado em uma linha de montagem e uma parada de emergência fosse acionada devido a uma obstrução de um braço robótico, uma parada controlada seria usada. Isso desaceleraria gradualmente qualquer movimento, permitindo que o maquinário parasse suavemente, dando aos trabalhadores tempo para sair do caminho.
Uma parada descontrolada remove imediatamente toda a energia das máquinas. No exemplo do chassi do carro, a remoção de toda a energia pode fazer com que o chassi caia sobre os trabalhadores abaixo. No entanto, em um evento como um incêndio elétrico, uma parada descontrolada seria usada, pois cortaria toda a energia do maquinário imediatamente.
Normas para Paradas de Emergência em Robótica Industrial
Os padrões e leis de toda a indústria regem o uso de e-stops na robótica industrial, ajudando a garantir um alto padrão de segurança do trabalhador em toda a indústria. Alguns desses órgãos normativos incluem:
- Associação da Indústria Robótica (RIA): A associação que define padrões de segurança para robôs industriais.
- American National Standards Institute (ANSI): Um instituto que mantém padrões de segurança no local de trabalho nos Estados Unidos.
- Organização Internacional de Normalização (ISO): Uma organização que mantém as normas internacionais para a segurança no local de trabalho.
- Administração de Segurança e Saúde Ocupacional (OSHA): A administração federal que define e aplica os regulamentos de segurança no local de trabalho.
Os tipos de padronização incluem o tipo de mecanismo usado para acionar uma parada eletrônica, a cor do mecanismo e o posicionamento do mecanismo. Por exemplo, as paradas de emergência devem ser de cor vermelha e amarela, para alta visibilidade. Eles devem exigir apenas uma única ação para iniciá-los e devem ser posicionados fora do alcance de um braço robótico, para que os trabalhadores não precisem cruzar o caminho do perigo para ativá-los. Eles também devem ser colocados em um local facilmente acessível aos operadores. Estes são apenas alguns dos padrões em vigor para manter os trabalhadores seguros ao usar e-stops.

Outros mecanismos de segurança
Muitos outros dispositivos são usados para ajudar a garantir a segurança dos operadores de robôs industriais. Os mecanismos de segurança são frequentemente usados em conjunto uns com os outros. Os ambientes industriais do mundo real usam uma variedade de dispositivos, mecanismos e precauções de segurança para garantir a segurança do trabalhador, incluindo:
-
Barreiras e Proteções de Segurança: Barreiras físicas que separam os robôs dos trabalhadores humanos para evitar o contato acidental. Isso inclui cercas, gaiolas e outras estruturas projetadas para restringir o acesso a áreas perigosas.
-
Dispositivos Sensores de Presença: Sensores que detectam a presença de seres humanos ou objetos dentro de uma área especificada. Estes podem interromper a operação do robô se uma intrusão for detectada.
-
Braços Sensores: Braços robóticos equipados com sensores para detectar o contato com seres humanos ou objetos. Esses sensores podem acionar um desligamento ou desacelerar o robô para evitar ferimentos ou danos.
-
Tapete de Pressão: Tapetes colocados no chão ao redor do robô que detectam pressão ou peso. Se uma pessoa pisar no tapete, o robô deixará de operar para evitar acidentes.
-
Alarmes: Sistemas de alerta sonoro e visual que alertam os trabalhadores para a presença de um robô ativo ou uma condição insegura. Esses alarmes podem ser acionados por vários sistemas de segurança ou manualmente pelos operadores.
-
Cortinas de Luz: Matrizes de feixes de luz que criam uma barreira invisível em torno de áreas perigosas. Se algum feixe for interrompido, o robô é parado imediatamente para garantir a segurança do pessoal.
A Parada Controlada na Célula de Trabalho CTE
Na Célula de Trabalho CTE, um botão na parte superior da Torre de Sinal pode acionar uma parada controlada quando pressionado.
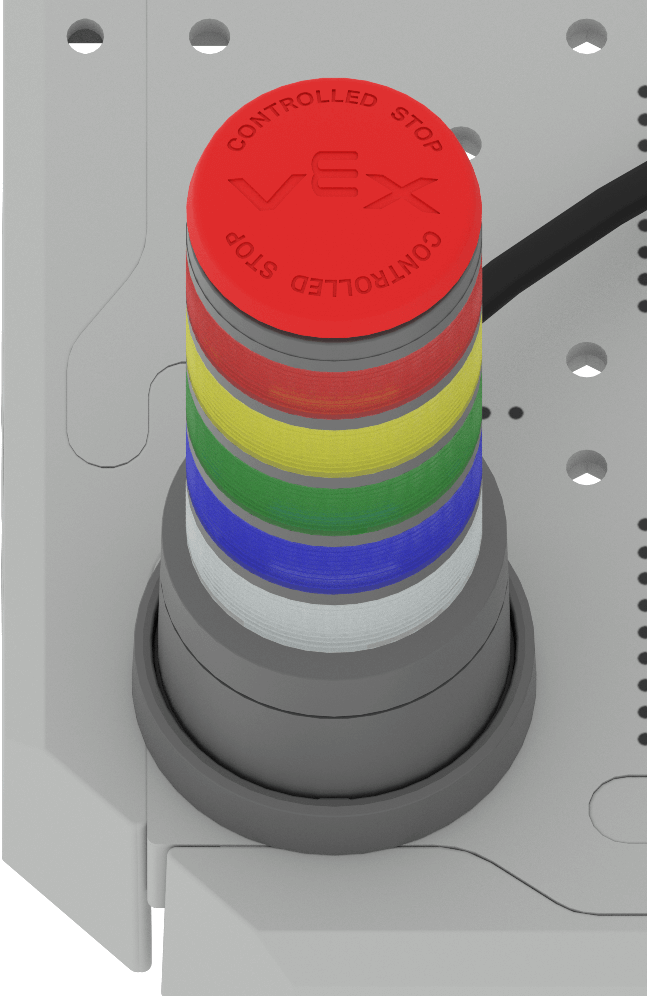
Você notará que o botão diz "Parada controlada" na superfície. Quando codificado para servir como uma parada controlada, o botão pode ser pressionado se qualquer componente da Célula de Trabalho estiver se movendo de uma maneira que seja prejudicial a si mesmo ou ao usuário.
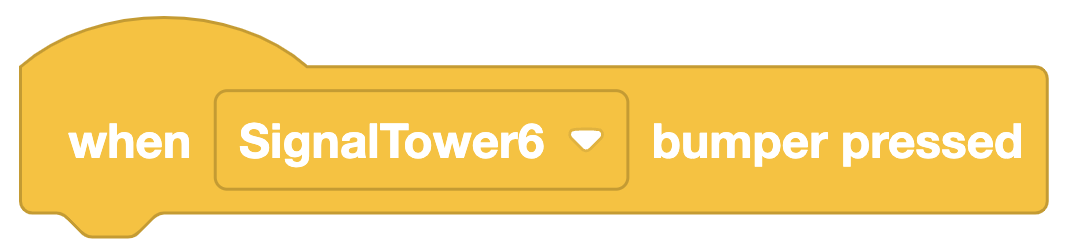
O bloco When signal tower bumper pressed? é usado para codificar a funcionalidade de parada controlada.
Há uma pilha de blocos no projeto Brain CTE 6-Axis Arm Template que permite a funcionalidade de parada controlada. Você aprenderá mais sobre como codificar a Torre de Sinal na próxima Lição.
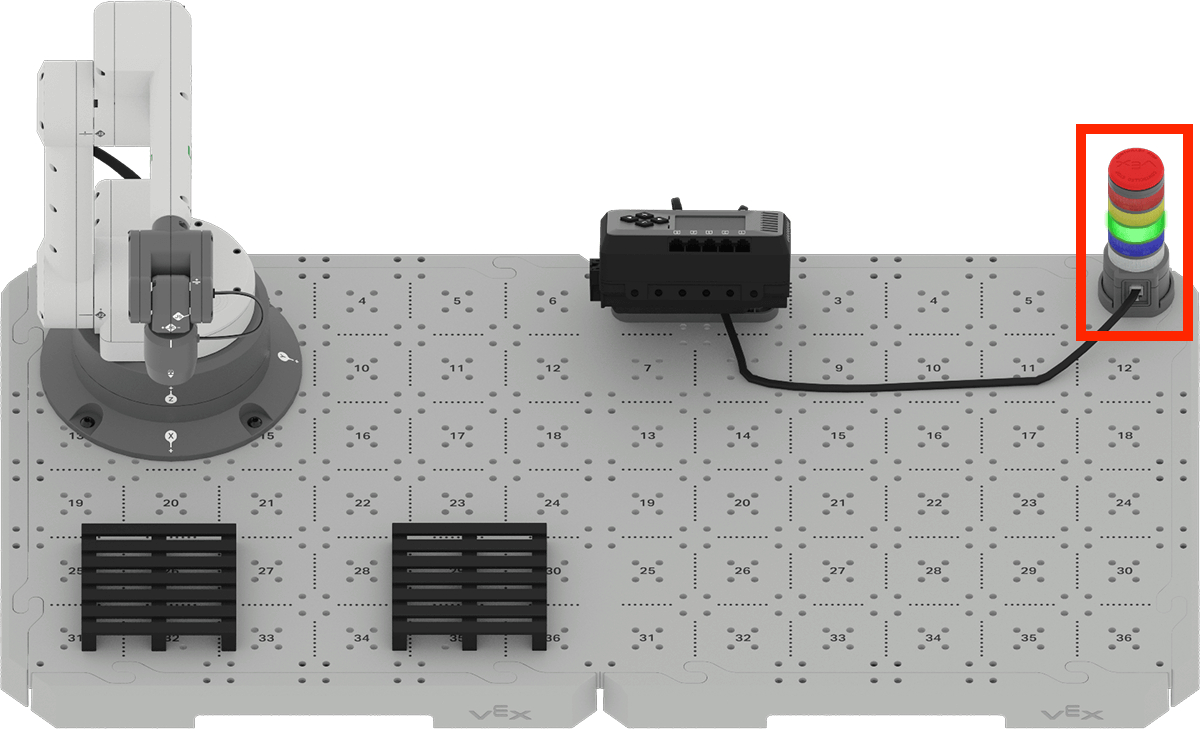
Você notará que a Torre de Sinal em sua construção está localizada fora do caminho do Braço de 6 Eixos, para que possa ser facilmente pressionada de maneira segura, se necessário.
Verifique a sua compreensão
Antes de passar para a próxima lição, certifique-se de entender os conceitos abordados nesta lição, respondendo às perguntas no documento abaixo em seu caderno de engenharia.
Verifique as suas perguntas de compreensão > (Google Doc / .docx / .pdf)
Selecione Avançar > para passar para a próxima lição.