
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับมาตรการความปลอดภัยที่สำคัญอีกประการหนึ่งที่ป้องกันอุบัติเหตุและสร้างความมั่นใจในความปลอดภัยของพนักงานนั่นคือการหยุดฉุกเฉิน
คุณจะได้เรียนรู้:
- การหยุดฉุกเฉินคืออะไรและใช้ทำอะไร
- ความแตกต่างระหว่างการหยุดที่ควบคุมได้และที่ควบคุมไม่ได้
- กลไกและมาตรฐานความปลอดภัยอื่นๆ ในหุ่นยนต์อุตสาหกรรม
- การหยุดการทำงานแบบควบคุมบน CTE เวิร์คเซลล์ ทำงานอย่างไร
ในตอนท้ายของบทเรียนนี้ท่านจะทบทวนสิ่งที่ได้เรียนรู้ขณะตอบคำถามในสมุดบันทึกวิศวกรรมของท่าน
จุดพักฉุกเฉิน
การหยุดฉุกเฉินหรือที่เรียกว่า e-stop เป็นกลไกความปลอดภัยที่สำคัญที่ออกแบบมาเพื่อให้คนงานและอุปกรณ์ปลอดภัยจากอันตรายในกรณีที่เกิดสถานการณ์ที่เป็นอันตราย E-stops เป็นมาตรฐานทั่วทั้งระบบอัตโนมัติทางอุตสาหกรรมและได้รับการออกแบบมาเพื่อหยุดการทำงานของหุ่นยนต์อย่างรวดเร็วในกรณีฉุกเฉินป้องกันการบาดเจ็บต่อคนงานและอุปกรณ์ป้องกัน E-stop ถูกเรียกใช้โดยการกระทำเดียวเช่นปุ่มกด เมื่อเริ่มต้นระบบ e-stop แล้วผู้ปฏิบัติงานจะต้องดำเนินการโดยเจตนาเพื่อเริ่มต้นการดำเนินงานใหม่อย่างปลอดภัย

ในหุ่นยนต์อุตสาหกรรมการหยุดฉุกเฉินสามารถเริ่มต้นได้ในหลายสถานการณ์ ตัวอย่างเช่นความล้มเหลวของมอเตอร์หรือข้อผิดพลาดในการเขียนโปรแกรมอาจก่อให้เกิดความเสี่ยงต่ออุปกรณ์หรือบุคลากร เมื่อตรวจพบข้อผิดพลาดอาจมีการเริ่มต้นระบบ e-stop โดยคนงานโดยบอกให้เซลล์งานหยุดการทำงาน กรณีอื่นๆที่สามารถเปิดใช้งาน e-stops ได้รวมถึงอันตรายที่ไม่คาดคิดเช่น:
- ไฟไหม้
- คนงานที่ก้าวเข้าไปในเส้นทางของแขนหุ่นยนต์
- สิ่งกีดขวางที่ตกลงไปในช่วงของแขนหุ่นยนต์ ทำให้เกิดการชนกัน
การเรียกใช้ e-stop สามารถป้องกันอันตรายต่อคนงานและช่วยหลีกเลี่ยงความเสียหายที่มีราคาแพง
จุดแวะที่ควบคุมได้กับจุดแวะที่ควบคุมไม่ได้
การหยุดฉุกเฉินแบ่งออกเป็น 2 ประเภทคือแบบควบคุมและแบบควบคุมไม่ได้ การใช้ตัวหยุดที่ควบคุมหรือไม่สามารถควบคุมได้ขึ้นอยู่กับสถานการณ์ ตัวหยุดที่ ควบคุมจะ ค่อยๆลาดลงแต่ไม่ได้กำจัดพลังงานไปยังเครื่องจักรอย่างเต็มที่ ตัวอย่างเช่นหากคนงานอยู่ในตำแหน่งใต้โครงรถหนักบนสายการประกอบและมีการเรียกใช้การหยุดฉุกเฉินเนื่องจากการอุดตันของแขนหุ่นยนต์จะมีการใช้การหยุดแบบควบคุม สิ่งนี้จะค่อยๆชะลอการเคลื่อนไหวใดๆทำให้เครื่องจักรหยุดทำงานได้อย่างราบรื่นทำให้คนงานมีเวลาที่จะก้าวออกจากทาง
การหยุดที่ ไม่สามารถควบคุมได้จะลบพลังงานทั้งหมดไปยังเครื่องจักร ทันที ในตัวอย่างแชสซีรถยนต์การถอดพาวเวอร์ทั้งหมดอาจทำให้แชสซีตกอยู่กับคนงานด้านล่าง อย่างไรก็ตามในกรณีเช่นไฟไหม้ไฟฟ้าจะมีการใช้ตัวหยุดที่ไม่สามารถควบคุมได้เนื่องจากจะตัดไฟทั้งหมดไปยังเครื่องจักรทันที
มาตรฐานสำหรับการหยุดฉุกเฉินในหุ่นยนต์อุตสาหกรรม
มาตรฐานและกฎหมายที่กว้างขวางของอุตสาหกรรมควบคุมการใช้ e-stops ในหุ่นยนต์อุตสาหกรรมช่วยให้มั่นใจได้ถึงมาตรฐานความปลอดภัยของคนงานในอุตสาหกรรม บางส่วนของหน่วยงานมาตรฐานเหล่านี้รวมถึง:
- สมาคมอุตสาหกรรม หุ่นยนต์ (RIA): สมาคมที่กำหนดมาตรฐานความปลอดภัยสำหรับหุ่นยนต์อุตสาหกรรม
- American National Standards Institute (ANSI): สถาบัน ที่รักษามาตรฐานความปลอดภัยในสถานที่ทำงานในสหรัฐอเมริกา
- International Organization for Standardization (ISO): องค์กร ที่รักษามาตรฐานสากลด้านความปลอดภัยในสถานที่ทำงาน
- การบริหารความปลอดภัยและ อาชีวอนามัย (OSHA): การบริหารงาน ของรัฐบาลกลางที่กำหนดและบังคับใช้กฎระเบียบด้านความปลอดภัยในสถานที่ทำงาน
ประเภทของการกำหนดมาตรฐานรวมถึงประเภทของกลไกที่ใช้ในการกระตุ้น e stop สีของกลไกและการวางตำแหน่งของกลไก ตัวอย่างเช่น e-stops ควรมีสีแดงและสีเหลืองเพื่อให้มองเห็นได้ชัดเจน พวกเขาควรต้องใช้การดำเนินการเพียงครั้งเดียวเพื่อเริ่มต้นและควรอยู่ในตำแหน่งที่ไม่สามารถเข้าถึงแขนหุ่นยนต์ได้ดังนั้นคนงานจึงไม่จำเป็นต้องข้ามไปในทางที่เป็นอันตรายเพื่อเปิดใช้งานพวกเขา นอกจากนี้ควรวางไว้ในตำแหน่งที่ผู้ปฏิบัติงานสามารถเข้าถึงได้ง่าย นี่เป็นเพียงส่วนหนึ่งของมาตรฐานที่มีอยู่เพื่อให้แรงงานปลอดภัยเมื่อใช้ e-stops

กลไกความปลอดภัยอื่นๆ
มีการใช้อุปกรณ์อื่นๆอีกมากมายเพื่อช่วยให้มั่นใจในความปลอดภัยของผู้ปฏิบัติงานของหุ่นยนต์อุตสาหกรรม กลไกความปลอดภัยมักใช้ร่วมกัน สภาพแวดล้อมทางอุตสาหกรรมในโลกแห่งความเป็นจริงใช้อุปกรณ์ความปลอดภัยกลไกและข้อควรระวังที่หลากหลายเพื่อให้มั่นใจถึงความปลอดภัยของผู้ปฏิบัติงานรวมถึง:
-
สิ่งกีดขวางและเครื่องป้องกันความปลอดภัย: สิ่งกีดขวาง ทางกายภาพที่แยกหุ่นยนต์ออกจากคนงานเพื่อป้องกันการสัมผัสโดยไม่ได้ตั้งใจ ซึ่งรวมถึงรั้วกรงและโครงสร้างอื่นๆที่ออกแบบมาเพื่อจำกัดการเข้าถึงพื้นที่อันตราย
-
อุปกรณ์ตรวจจับการปรากฏตัว: เซ็นเซอร์ที่ตรวจจับการปรากฏตัวของมนุษย์หรือวัตถุภายในพื้นที่ที่ระบุ สิ่งเหล่านี้สามารถ หยุดการทำงานของหุ่นยนต์ได้หากตรวจพบการบุกรุก
-
แขนเซ็นเซอร์: แขน หุ่นยนต์ที่ติดตั้งเซ็นเซอร์เพื่อตรวจจับการสัมผัสกับมนุษย์หรือวัตถุ เซ็นเซอร์เหล่านี้สามารถกระตุ้นการปิดเครื่องหรือทำให้หุ่นยนต์ช้าลงเพื่อป้องกันการบาดเจ็บหรือความเสียหาย
-
แผ่นรองรับแรง ดัน: แผ่นรองวางบนพื้นรอบๆหุ่นยนต์ที่ตรวจจับความดันหรือน้ำหนัก หากมีคนเหยียบแผ่นรองหุ่นยนต์จะหยุดทำงานเพื่อป้องกันอุบัติเหตุ
-
สัญญาณเตือน: ระบบเตือน ด้วยเสียงและภาพที่จะแจ้งเตือนให้พนักงานทราบว่ามีหุ่นยนต์ที่ใช้งานอยู่หรืออยู่ในสภาพที่ไม่ปลอดภัย สัญญาณเตือนเหล่านี้สามารถถูกเรียกใช้โดยระบบความปลอดภัยต่างๆหรือด้วยตนเองโดยผู้ปฏิบัติงาน
-
ม่านแสง: อาร์เรย์ของลำแสงที่สร้างสิ่งกีดขวางที่มองไม่เห็นรอบๆพื้นที่อันตราย หากลำแสงใดๆถูกขัดจังหวะหุ่นยนต์จะหยุดทำงานทันทีเพื่อความปลอดภัยของบุคลากร
ตัวหยุดที่มีการควบคุมบน CTE เวิร์คเซลล์
ที่ CTE เวิร์คเซลล์ ปุ่มที่ด้านบนของ Signal Tower สามารถกระตุ้นการหยุดแบบควบคุมได้เมื่อกด
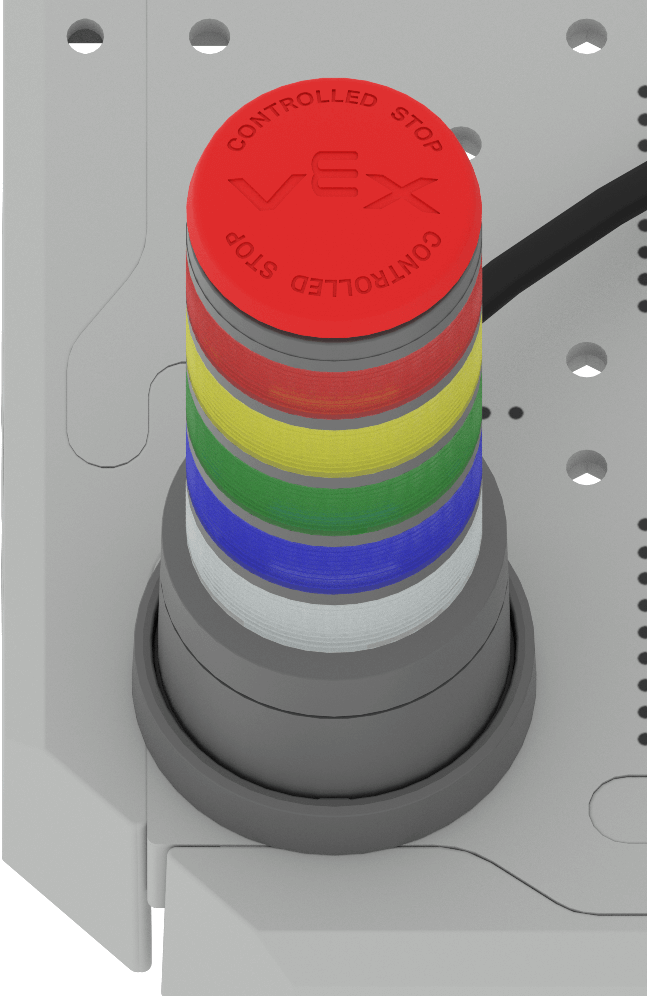
คุณจะสังเกตเห็นว่าปุ่มเขียนว่า "Controlled Stop" บนพื้นผิว เมื่อกำหนดรหัสเพื่อทำหน้าที่เป็นตัวหยุดควบคุมสามารถกดปุ่มได้หากส่วนประกอบใดๆของ เวิร์คเซลล์ เคลื่อนที่ในลักษณะที่สร้างความเสียหายให้กับตัวเองหรือผู้ใช้
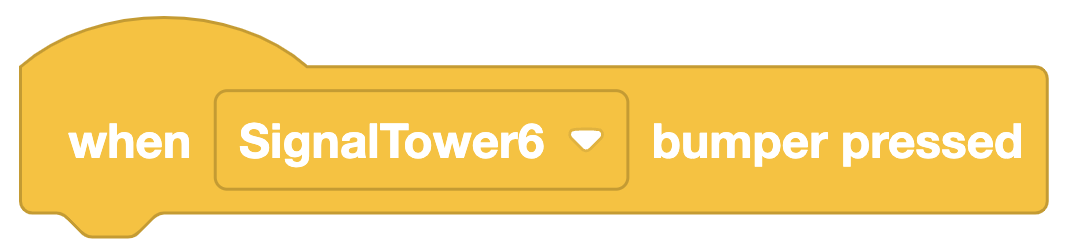
เมื่อมีการกดกันชนเสาสัญญาณหรือไม่ บล็อกจะใช้ในการเขียนรหัสฟังก์ชันหยุดการทำงานที่ควบคุม
มีกองบล็อกในโครงการ Brain CTE 6 - Axis Arm Template ที่ช่วยให้สามารถควบคุมการทำงานของ STOP ได้ คุณจะได้เรียนรู้เพิ่มเติมเกี่ยวกับการเขียนโค้ดทาวเวอร์สัญญาณในบทเรียนถัดไป
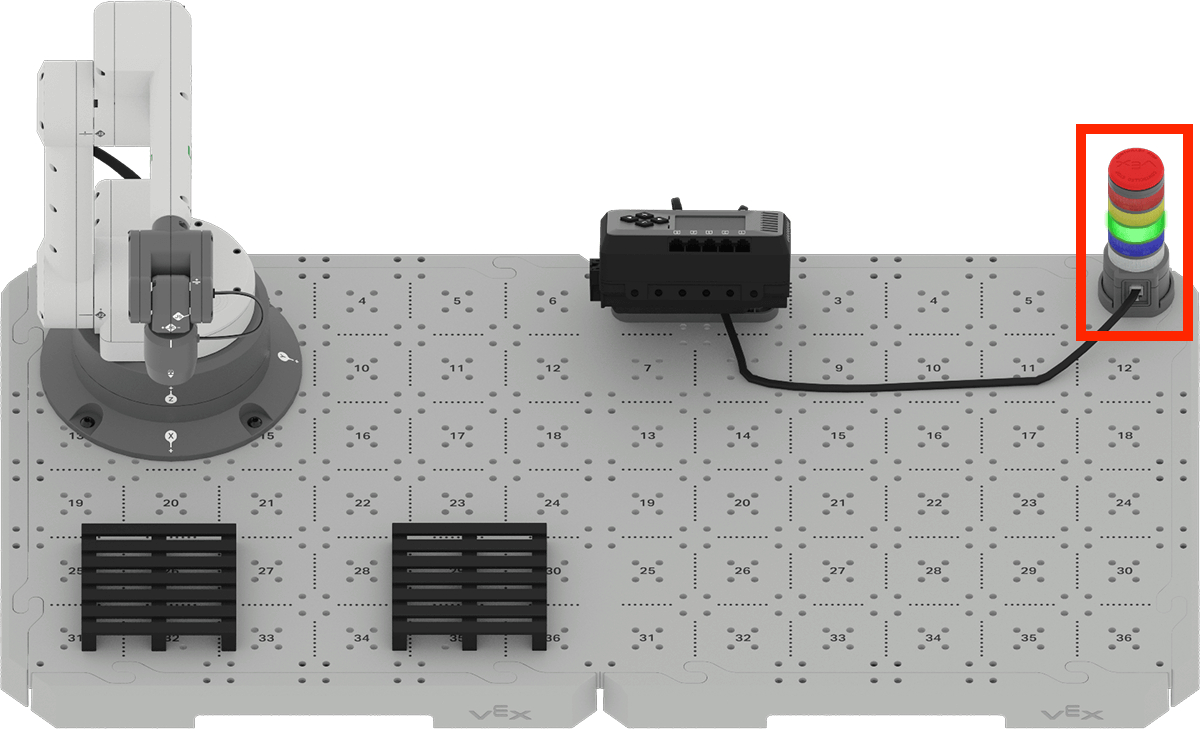
คุณจะสังเกตเห็นว่าหอคอยสัญญาณบนอาคารของคุณตั้งอยู่นอกเส้นทางของแขน 6 แกนเพื่อให้สามารถกดได้อย่างง่ายดายด้วยวิธีที่ปลอดภัยหากจำเป็น
ตรวจสอบความเข้าใจของคุณ
ก่อนที่คุณจะไปยังบทเรียนถัดไปตรวจสอบให้แน่ใจว่าคุณเข้าใจแนวคิดที่ครอบคลุมในบทเรียนนี้โดยการตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของคุณ
ตรวจสอบคำถามเกี่ยวกับความเข้าใจของ คุณ > (Google Doc)
เลือก ถัด > ไปเพื่อไปยังบทเรียนถัดไป