
En esta lección, aprenderá sobre otra medida de seguridad importante que previene accidentes y garantiza la seguridad de los trabajadores, la parada de emergencia.
Aprenderás:
- Qué es una parada de emergencia y para qué se utiliza.
- La diferencia entre paradas controladas y no controladas.
- Otros mecanismos y estándares de seguridad en robótica industrial.
- Cómo funciona la parada controlada en la CTE Workcell.
Al final de esta lección, repasará lo que aprendió mientras responde preguntas en su cuaderno de ingeniería.
Paradas de emergencia
Una parada de emergencia, también conocida como parada eléctrica, es un mecanismo de seguridad vital diseñado para mantener a los trabajadores y al equipo a salvo de daños en caso de una situación peligrosa. Las paradas de emergencia son estándar en toda la automatización industrial y están diseñadas para detener rápidamente las operaciones robóticas en emergencias, prevenir lesiones a los trabajadores y proteger los equipos. Una parada electrónica se activa con una sola acción, como un botón pulsador. Una vez que se ha iniciado una parada electrónica, un operador debe actuar intencionalmente para reiniciar las operaciones de forma segura.

En robótica industrial, las paradas de emergencia se pueden iniciar en una variedad de circunstancias. Por ejemplo, una falla del motor o un error de programación podrían representar un riesgo para el equipo o el personal. Cuando se detecta el error, un trabajador podría iniciar una parada electrónica, indicando a la célula de trabajo que cese las operaciones. Otros casos en los que se podrían activar las paradas electrónicas incluyen peligros imprevistos, como:
- incendios.
- un trabajador que se interpone en el camino de un brazo robótico.
- una obstrucción que cae en el rango de un brazo robótico que hace que sea probable una colisión.
Activar una parada eléctrica puede evitar daños a los trabajadores y ayudar a evitar daños costosos.
Paradas controladas vs. paradas no controladas
Hay dos categorías de paradas de emergencia: controladas y no controladas. El uso de una parada controlada o no controlada depende de la situación. Una parada controlada disminuye gradualmente, pero no elimina por completo la alimentación de las máquinas. Por ejemplo, si los trabajadores se colocaran debajo de un chasis de automóvil pesado en una línea de montaje y se activara una parada de emergencia debido a una obstrucción de un brazo robótico, se utilizaría una parada controlada. Esto ralentizaría gradualmente cualquier movimiento, permitiendo que la maquinaria se detuviera sin problemas, dando a los trabajadores tiempo para apartarse del camino.
Una parada incontrolada elimina inmediatamente toda la energía de las máquinas. En el ejemplo del chasis del automóvil, la eliminación de toda la energía podría hacer que el chasis cayera sobre los trabajadores de abajo. Sin embargo, en un evento como un incendio eléctrico, se utilizaría una parada descontrolada, ya que cortaría toda la energía a la maquinaria de inmediato.
Normas para Paradas de Emergencia en Robótica Industrial
Las normas y leyes de toda la industria rigen el uso de e-stops en robótica industrial, lo que ayuda a garantizar un alto nivel de seguridad de los trabajadores en toda la industria. Algunos de estos organismos de normalización incluyen:
- Robotic Industry Association (RIA): La asociación que establece estándares de seguridad para robots industriales.
- Instituto Nacional Americano de Estándares (ANSI): Un instituto que mantiene estándares para la seguridad en el lugar de trabajo en los Estados Unidos.
- Organización Internacional de Normalización (ISO): Una organización que mantiene los estándares internacionales para la seguridad en el lugar de trabajo.
- Administración de Seguridad y Salud Ocupacional (OSHA): La administración federal que establece y hace cumplir las normas de seguridad en el lugar de trabajo.
Los tipos de estandarización incluyen el tipo de mecanismo utilizado para activar una parada e, el color del mecanismo y el posicionamiento del mecanismo. Por ejemplo, las paradas de emergencia deben ser de color rojo y amarillo, para una alta visibilidad. Deben requerir una sola acción para iniciarlas, y deben colocarse fuera del alcance de un brazo robótico, para que los trabajadores no tengan que cruzarse en peligro para activarlas. También deben colocarse en un lugar de fácil acceso para los operadores. Estos son solo algunos de los estándares establecidos para mantener a los trabajadores seguros al usar paradas eléctricas.

Otros mecanismos de seguridad
Se utilizan muchos otros dispositivos para ayudar a garantizar la seguridad de los operadores de robots industriales. Los mecanismos de seguridad se utilizan a menudo en conjunto entre sí. Los entornos industriales del mundo real utilizan una variedad de dispositivos, mecanismos y precauciones de seguridad para garantizar la seguridad de los trabajadores, que incluyen:
-
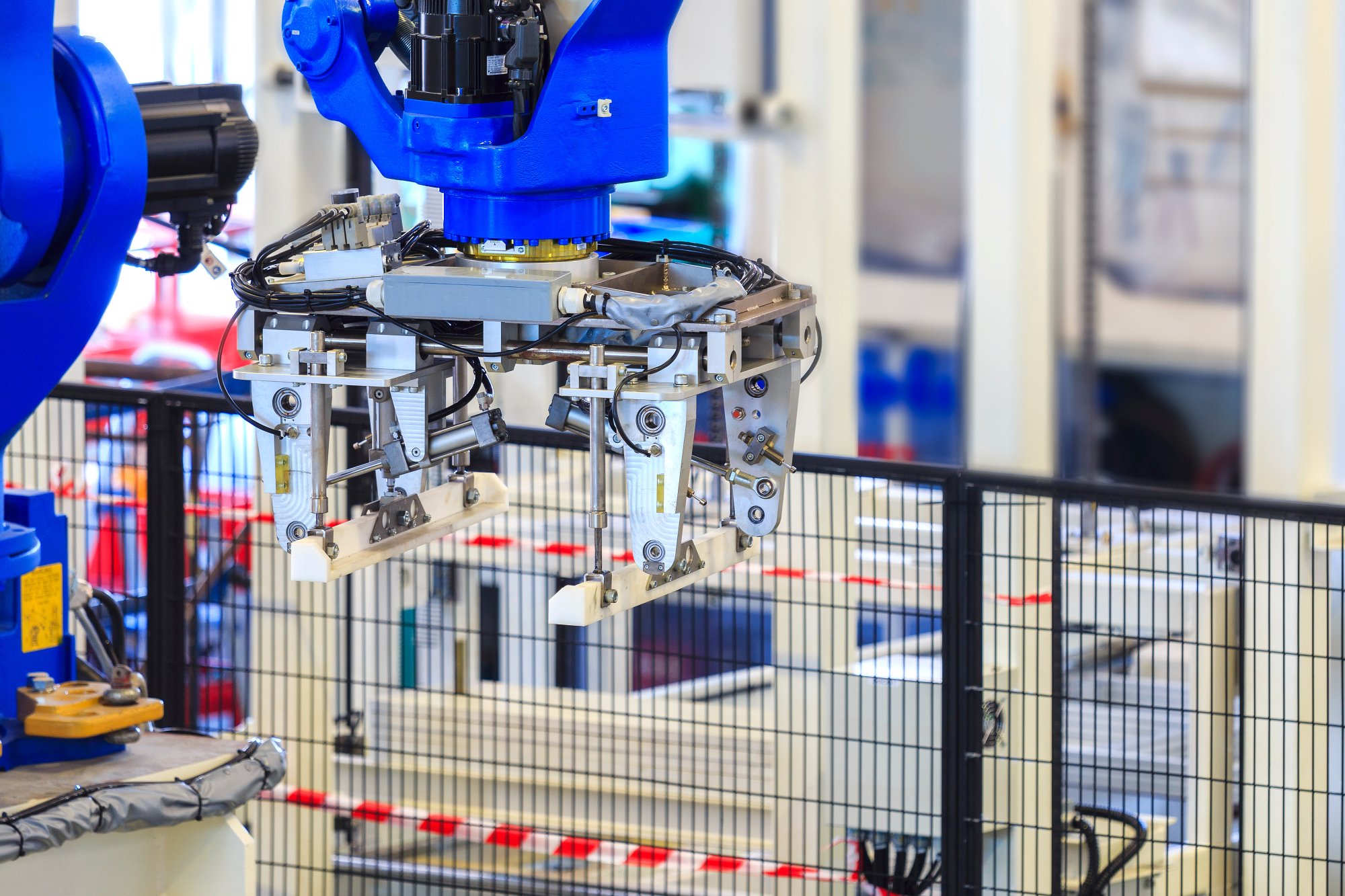
Barreras y protectores de seguridad: barreras físicas que separan a los robots de los trabajadores humanos para evitar el contacto accidental. Estos incluyen cercas, jaulas y otras estructuras diseñadas para restringir el acceso a zonas peligrosas.
-
Dispositivos de detección de presencia: sensores que detectan la presencia de humanos u objetos dentro de un área específica. Estos pueden detener el funcionamiento del robot si se detecta una intrusión.
-
Brazos sensores: Brazos robóticos equipados con sensores para detectar el contacto con personas u objetos. Estos sensores pueden provocar un apagado o ralentizar el robot para evitar lesiones o daños.
-
Alfombrilla de presión: alfombrillas colocadas en el suelo alrededor del robot que detectan la presión o el peso. Si una persona pisa el tapete, el robot dejará de funcionar para evitar accidentes.
-
Alarmas: Sistemas de alerta audibles y visuales que alertan a los trabajadores de la presencia de un robot activo o de una condición insegura. Estas alarmas pueden ser activadas por varios sistemas de seguridad o manualmente por los operadores.
-
Cortinas de luz: conjuntos de haces de luz que crean una barrera invisible alrededor de las zonas peligrosas. Si se interrumpe cualquier viga, el robot se detiene inmediatamente para garantizar la seguridad del personal.
La parada controlada en la celda de trabajo CTE
En la CTE Workcell, un botón en la parte superior de la torre de señal puede activar una parada controlada cuando se pulsa.
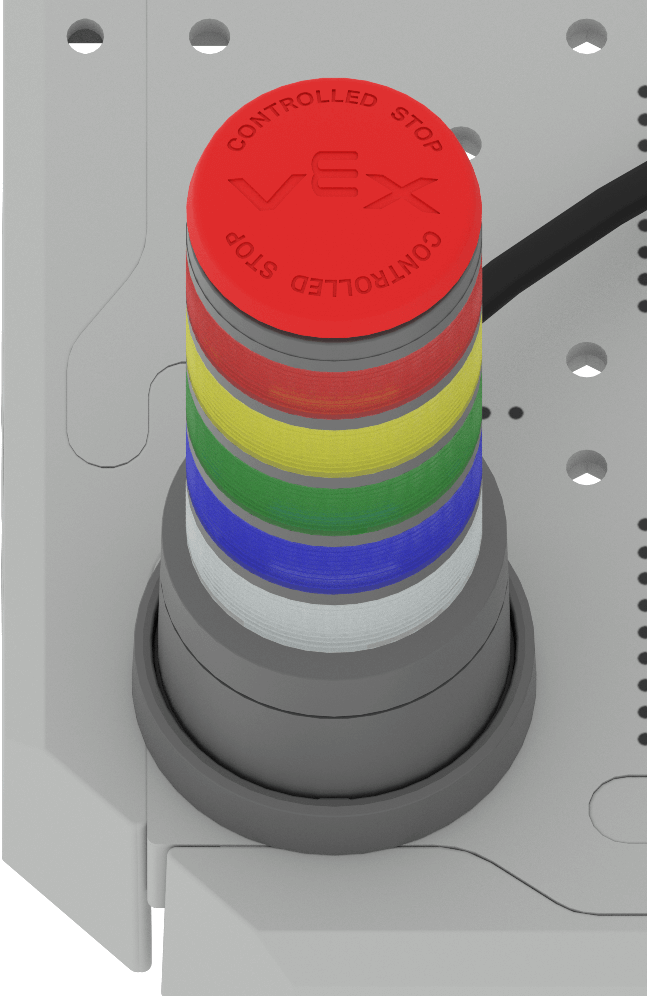
Notará que el botón dice "Parada controlada" en la superficie. Cuando se codifica para que sirva como una parada controlada, se puede pulsar el botón si algún componente de la célula de trabajo se mueve de una manera que se daña a sí mismo o al usuario.
El bloque When signal tower bumper pressed? se utiliza para codificar la funcionalidad de parada controlada.
Hay una pila de bloques en el proyecto Brain CTE 6-Axis Arm Template que permite la funcionalidad de parada controlada. Aprenderá más sobre la codificación de la torre de señales en la próxima lección.
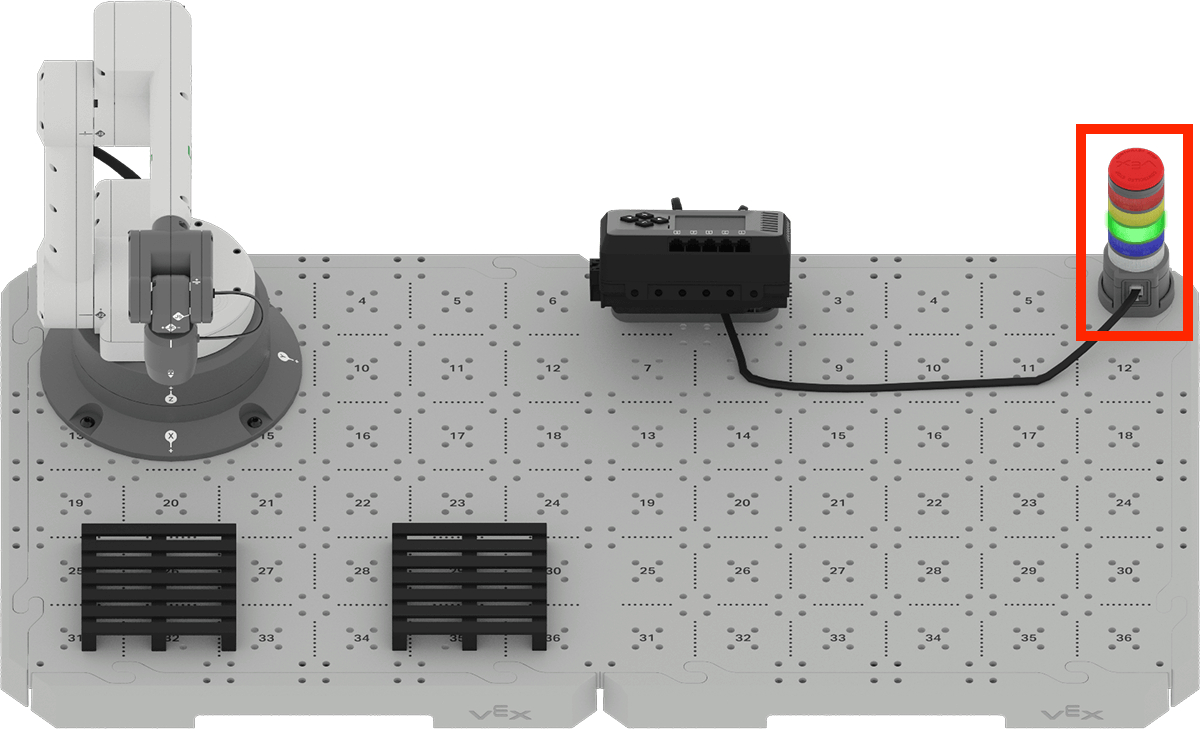
Notará que la torre de señalización de su compilación está ubicada fuera de la trayectoria del brazo de 6 ejes, de modo que se puede presionar fácilmente de manera segura si es necesario.
Compruebe su comprensión
Antes de pasar a la siguiente lección, asegúrate de comprender los conceptos tratados en esta lección respondiendo a las preguntas del siguiente documento en tu cuaderno de ingeniería.
Verifique sus preguntas de comprensión > (Google Doc / .docx / .pdf)
Seleccione Siguiente > para pasar a la siguiente lección.